一种调车机车自动驾驶控制执行系统及方法与流程
1.本发明涉及轨道交通的技术领域,具体涉及一种调车机车自动驾驶控制执行系统及方法。
背景技术:
2.本节中的陈述仅提供与本公开相关的背景信息,并且可能不构成现有技术。
3.随着科技的发展和工业自动化水平的不断提高,工业生产过程中的信息化、自动化、智能化是现阶段工业现代化发展的方向;对于工矿、钢铁、港口等企业,在保证安全的前提下,尽可能提高运输效率,节约运输成本,降低人员劳动强度,机车自动驾驶系统是最佳实现方案。
4.目前各机车主机厂不管是现有还是新造机车的机车控制系统未统一,机车自动驾驶系统在实施时,存在自控驾驶控制指令不能直接转化为机车控制指令的难题。
技术实现要素:
5.本发明的目的在于:针对目前各机车主机厂不管是现有还是新造机车的机车控制系统未统一,机车自动驾驶系统在实施时,存在自控驾驶控制指令不能直接转化为机车控制指令的难题,提供了一种调车机车自动驾驶控制执行系统及方法,将自动驾驶控制执行单元作为中间接口将自动驾驶主机与机车微机控制系统连接在一起,解决了上述问题。
6.本发明的技术方案如下:
7.一种调车机车自动驾驶控制执行系统,包括:
8.人工/自动驾驶模式切换模块,所述人工/自动驾驶模式切换模块用于切换驾驶模式;
9.自动驾驶控制执行单元,所述自动驾驶控制执行单元在自动驾驶模式下,采集机车状态信息,并从自动驾驶主机中接收自动驾驶控制信号,然后结合机车状态信息和自动驾驶控制信号,经过逻辑运算后,输出自动驾驶控制指令至机车微机控制系统,由机车微机控制系统完成机车驾驶控制;所述自动驾驶控制执行单元在人工驾驶模式下断开自动驾驶主机对机车微机控制系统的控制,机车微机控制系统根据机车操纵台上的司控器和扳键等机车微机输入信号完成机车驾驶控制。
10.进一步地,所述人工/自动驾驶模式切换模块切换至人工驾驶模式时,将自动驾驶对机车微机控制系统的控制切断;
11.所述人工/自动驾驶模式切换模块切换至自动驾驶模式时,将司控器和扳键等机车微机输入信号切断。
12.进一步地,所述自动驾驶控制执行单元在人工驾驶模式和自动驾驶模式下均将采集的机车状态信息反馈至自动驾驶主机。
13.进一步地,所述机车状态信息包括:
14.机车操纵台上的扳键信号和报警信号;
15.各传感器的压力信息;
16.机车速度和柴油机转速。
17.进一步地,所述自动驾驶控制执行单元包括:
18.控制主机,所述控制主机将采集的机车状态信息和接收的自动驾驶控制信号经过逻辑运算处理后,生成自动驾驶控制指令传送至机车微机控制系统,由机车微机控制系统完成机车驾驶控制;
19.数字量模块,所述数字量模块用于采集机车操纵台上的扳键信号和报警信号,并传送至控制主机;
20.模拟量模块,所述模拟量模块用于采集各传感器的压力信号,并传送至控制主机;
21.调理模块,所述调理模块将柴油机转速传感器获取的柴油机转速和机车速度传感器获取的机车速度转化为控制主机所识别的输入信号。
22.进一步地,所述各传感器包括:总风压力传感器、制动缸压力传感器、列车管压力传感器、均衡缸压力传感器、燃油压力传感器、滑油压力传感器、柴油机压力传感器、柴油机高温水传感器。
23.进一步地,所述自动驾驶控制执行单元还包括:
24.事件记录仪,所述事件记录仪记录自动驾驶控制执行单元采集的机车状态信息、自动驾驶主机发出的控制指令、自动驾驶控制执行单元执行的指令、机车运行轨迹,并通过网络传输到云端;
25.电源模块,所述电源模块为各设备供电。
26.进一步地,还包括紧急制动按钮和机车制动阀;
27.所述自动驾驶控制执行单元实时监测自动驾驶主机状态,当自动驾驶主机故障时,自动驾驶控制执行单元向机车微机控制系统发送卸载控制命令,同时控制机车制动阀动作,机车进行卸载及制动;
28.当自动驾能主机或自动驾驶控制执行单元故障时,通过紧急制动按钮可直接控制机车制动阀动作,机车制动并卸载;
29.一种调车机车自动驾驶控制执行方法,包括:
30.通过人工/自动驾驶模式切换模块切换驾驶模式,当切换至人工驾驶模式时,将自动驾驶主机对机车微机控制系统的控制切断;当切换至自动驾驶模式时,将司控器和扳键等机车微机输入信号切断;
31.自动驾驶模式下,自动驾驶控制执行单元结合采集的机车状态信息和接收的自动驾驶主机发送的自动驾驶控制信号,经过逻辑运算后,输出自动驾驶控制指令至机车微机控制系统,由机车微机控制系统完成机车驾驶控制;
32.人工驾驶模式下,自动驾驶主机对机车微机控制系统的控制断开,机车微机控制系统根据机车操纵台上的司控器和扳键等机车微机输入信号完成机车驾驶控制。
33.进一步地,自动驾驶控制执行单元实时监测自动驾驶主机状态,当自动驾驶主机故障时,自动驾驶控制执行单元向机车微机控制系统发送卸载控制命令,同时控制机车制动阀动作,机车进行卸载及制动;
34.当自动驾能主机或自动驾驶控制执行单元故障时,通过紧急制动按钮可直接控制机车制动阀动作,机车制动并卸载;
35.与现有的技术相比本发明的有益效果是:
36.1、一种调车机车自动驾驶控制执行系统及方法,由自动驾驶控制执行单元作为中间过渡接口,使自动驾驶主机与机车微机控制系统独立隔开,解决人工驾驶模式下自动驾驶主机对机车微机控制系统的影响。
37.2、一种调车机车自动驾驶控制执行系统及方法,可远程登录地面智能终端设备,实时查看车辆运行状态和历史数据,方便分析解决故障。
38.3、一种调车机车自动驾驶控制执行系统及方法,根据调车机车操控简单,控制数据较小的特点,设计的自动驾驶控制执行单元成本较低,经济性强。
附图说明
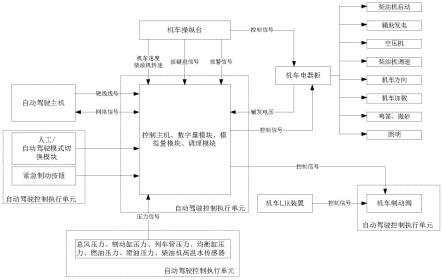
39.图1为一种调车机车自动驾驶控制执行系统的拓扑图
40.图2为一种调车机车自动驾驶控制执行系统中机车状态实时监控的原理图;
41.图3为一种调车机车自动驾驶控制执行系统中人工/自动驾驶模式切换模块的工作原理图;
42.图4为一种调车机车自动驾驶控制执行方法中处于自动驾驶状态时的工作原理图;
43.图5为一种调车机车自动驾驶控制执行方法中处于机车保护状态时的工作原理图。
具体实施方式
44.需要说明的是,术语“第一”和“第二”等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
45.下面结合实施例对本发明的特征和性能作进一步的详细描述。
46.实施例一
47.目前各机车主机厂不管是现有还是新造机车的机车控制系统未统一,机车自动驾驶系统在实施时,存在自控驾驶主机控制指令不能直接转化为机车控制指令的难题。
48.本实施例针对于上述问题,提出了一种调车机车自动驾驶控制执行系统及方法,将自动驾驶控制执行单元作为中间接口将自动驾驶主机与机车微机控制系统连接在一起,解决了上述问题。
49.请参阅图1-5,一种调车机车自动驾驶控制执行系统,具体包括:
50.人工/自动驾驶模式切换模块,所述人工/自动驾驶模式切换模块用于切换驾驶模式;
51.自动驾驶控制执行单元,所述自动驾驶控制执行单元在自动驾驶模式下,采集机车状态信息,具体的,所述机车状态信息包括:机车操纵台上的扳键信号和报警信号;各传
感器的压力信息;机车速度和柴油机转速;并从自动驾驶主机中接收自动驾驶控制信号,优选地,所述自动驾驶主机在自动驾驶模式下将自动驾驶控制信号发送至自动驾驶控制执行单元;所述自动驾驶主机通过网络信号和硬线信号与自动驾驶控制执行单元通讯;所述自动驾驶主机与自动驾驶控制执行单元之间通过rs485网络进行通讯;然后结合机车状态信息和自动驾驶控制信号,经过逻辑运算后,输出自动驾驶控制指令至机车微机控制系统,由机车微机控制系统完成机车驾驶控制(如柴油机启动控制、辅助发电控制、空压机控制等);所述自动驾驶控制执行单元在人工驾驶模式下断开自动驾驶主机对机车微机控制系统的控制,机车微机控制系统根据机车操纵台上的司控器和扳键等机车微机输入信号完成机车驾驶控制;优选地,所述机车微机控制系统包括机车电器柜以及众多与机车电器柜连接的车载设备,如图1所示;所述机车驾驶控制例如机车的牵引、调速、撒砂等动作。
52.在本实施例中,具体的,请参阅图3,图3给出了人工/自动驾驶模式切换模块的工作原理图;所述人工/自动驾驶模式切换模块切换至人工驾驶模式时,将自动驾驶主机对机车微机控制系统的控制切断;
53.所述人工/自动驾驶模式切换模块切换至自动驾驶模式时,将司控器和扳键等机车机车微机输入信号切断;
54.即通过工况万转开关切换至人工驾驶模式后,相应的切除继电器线圈失电,自动驾驶控制执行单元不再切断操纵台上的司控器及扳键等机车微机输入信号电路,仅进行机车状态信息采集并回传至自动驾驶主机的工作。
55.在本实施例中,具体的,所述自动驾驶控制执行单元在人工驾驶模式和自动驾驶模式下均将采集的机车状态信息反馈至自动驾驶主机。
56.在本实施例中,具体的,所述自动驾驶控制执行单元包括:
57.控制主机,所述控制主机将采集的机车状态信息和接收的自动驾驶控制信号经过逻辑运算处理后,生成自动驾驶控制指令传送至机车微机控制系统,由机车微机控制系统完成机车驾驶控制;
58.数字量模块,所述数字量模块用于采集机车操纵台上的扳键信号和报警信号,并传送至控制主机;
59.模拟量模块,所述模拟量模块用于采集各传感器的压力信号,并传送至控制主机;
60.调理模块,所述调理模块将柴油机转速传感器获取的柴油机转速和机车速度传感器获取的机车速度转化为控制主机所识别的输入信号。
61.在本实施例中,具体的,所述各传感器包括:总风压力传感器、制动缸压力传感器、列车管压力传感器、均衡缸压力传感器、燃油压力传感器、滑油压力传感器、柴油机压力传感器、柴油机高温水传感器。
62.在本实施例中,具体的,所述自动驾驶控制执行单元还包括:
63.事件记录仪,所述事件记录仪记录自动驾驶控制执行单元采集的机车状态信息、自动驾驶主机发出的控制指令、自动驾驶控制执行单元执行的指令、机车运行轨迹,并通过网络传输到云端;如图2所示,优选地,所述控制主机将机车状态信息以rs485总线的方式发送至事件记录仪,再通过车顶4g天线发送至云端服务器,地面人员可通过智能终端设备登陆云端实时查看机车状态和历史数据等,便于分析解决故障;
64.电源模块,所述电源模块为各设备供电;优选地,所述电源模块给控制主机、数字
量模块、模拟量模块、调理模块、各传感器等设备供电。
65.在本实施例中,具体的,如图1所示,还包括紧急制动按钮和机车制动阀;
66.所述自动驾驶控制执行单元实时监测自动驾驶主机状态,当自动驾驶主机故障时,自动驾驶控制执行单元向机车微机控制系统发送卸载控制命令,同时控制机车制动阀动作,机车进行卸载及制动;
67.当自动驾能主机或自动驾驶控制执行单元故障时,通过紧急制动按钮可直接控制机车制动阀动作,机车制动并卸载。
68.实施例二
69.实施例二是基于实施例一中的一种调车机车自动驾驶控制执行系统,提出了一种调车机车自动驾驶控制执行方法,具体包括如下:
70.通过人工/自动驾驶模式切换模块切换驾驶模式,当切换至人工驾驶模式时,将自动驾驶主机对机车微机控制的控制切断;当切换至自动驾驶模式时,将司控器和扳键等机车微机机车微机输入信号与切断;
71.自动驾驶模式下,自动驾驶控制执行单元结合采集的机车状态信息和接收的自动驾驶主机发送的自动驾驶控制信号,经过逻辑运算后,输出自动驾驶控制指令至机车微机控制系统,由机车微机控制系统完成机车驾驶控制;其工作原理图如图4所示;
72.人工驾驶模式下,自动驾驶主机对机车微机控制系统的控制断开,机车微机控制系统根据机车操纵台上的司控器和扳键等机车微机输入信号完成机车驾驶控制。
73.在本实施例中,还提出了机车保护方法,图5为机车保护状态下的系统状态图,具体为:
74.自动驾驶控制执行单元实时监测自动驾驶主机状态,当自动驾驶主机故障时,自动驾驶控制执行单元向机车微机控制系统发送卸载控制命令,同时控制机车制动阀动作,机车进行卸载及制动;
75.当自动驾能主机或自动驾驶控制执行单元故障时,通过紧急制动按钮可直接控制机车制动阀动作,机车制动并卸载;
76.以上所述实施例仅表达了本技术的具体实施方式,其描述较为具体和详细,但并不能因此而理解为对本技术保护范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术技术方案构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。
77.提供本背景技术部分是为了大体上呈现本发明的上下文,当前所署名的发明人的工作、在本背景技术部分中所描述的程度上的工作以及本部分描述在申请时尚不构成现有技术的方面,既非明示地也非暗示地被承认是本发明的现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1