轨道交通车地协同超视距障碍物检测系统及方法与流程
本发明涉及轨道交通的,具体地,涉及轨道交通车地协同超视距障碍物检测系统及方法,尤其涉及一种全自动运行轨道交通车地协同超视距障碍物检测系统与方法。
背景技术:
1、列车在以全自动模式运行过程中,由于既有cbtc系统的能力限制,无法对列车运行前方线路上影响列车正常运行的障碍物进行可靠、及时的发现,列车容易与障碍物发生碰撞而造成较大影响;而且随着列车运行速度的不断提高,列车安全停车所需的制动距离也越来越大,现有主流传感器(毫米波雷达、激光雷达或视觉传感器等)的检测距离较小,单一的在列车上安装障碍物检测传感器无法满足发现障碍物后列车紧急停车安全制动距离的要求,举例如下:
2、在某一地铁线路,当列车以80km/h的速度运行时,假设可保证的紧急制动率为0.8m/s2,速度测量误差为5%,则根据atc安全制动模型计算出列车在平直线路的紧急制动距离为((1+速度测量误差%)×80km/h/3.6)2/((0.8m/s2+坡度/10)×2)=340.3米,而目前主流的障碍物检测传感器如激光雷达、毫米波雷达以及视觉传感器等检测距离基本在200米左右,在此范围内即使检测到障碍物,列车将由于制动距离不足而与障碍物发生碰撞事故。
3、因此,需要提出一种新的技术方案以改善上述技术问题。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种轨道交通车地协同超视距障碍物检测系统及方法。
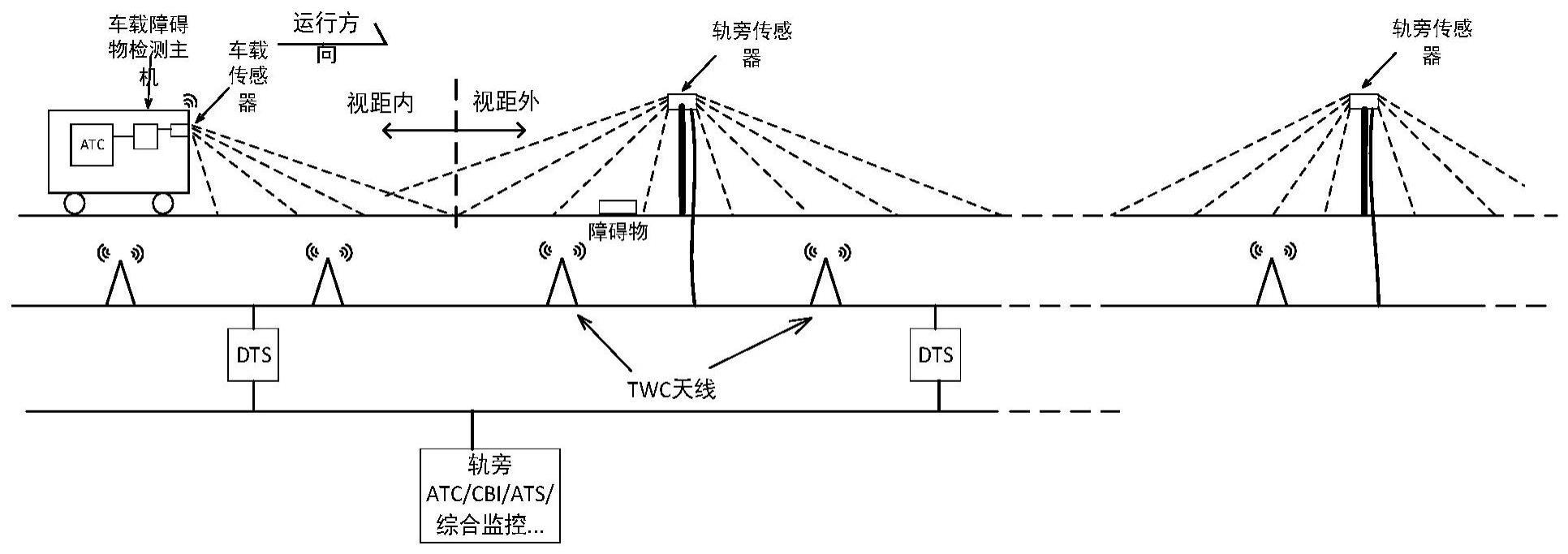
2、根据本发明提供的一种轨道交通车地协同超视距障碍物检测系统,包括:车载障碍物检测主机、车载障碍物检测传感器、轨旁障碍物检测传感器以及cbtc信号系统;
3、所述车载障碍物检测主机和车载障碍物检测传感器安装于列车前端,所述轨旁障碍物检测传感器沿轨道安装;所述cbtc信号系统包括twc子系统、车载atc子系统、轨旁atc子系统、轨旁cbi子系统、轨旁ats子系统以及综合监控系统;
4、所述车载atc子系统包含车载atp和车载ato,对车载列车进行自动运行与防护,轨旁atc子系统包含轨旁atp和轨旁ato,对轨旁相关列车进行自动运行与防护,cbi子系统控制道岔、信号、进路及相关联锁关系,ats子系统对列车进行监督和运营控制,twc子系统对车载atc子系统和轨旁的进行无线通信,综合监控系统对多个相关信息监控系统进行综合处理。
5、优选地,所述车载障碍物检测传感器与所述车载障碍物检测主机接口,探测列车运行前方范围内存在障碍物,将检测到的障碍物信息上传到车载障碍物检测主机。
6、优选地,所述轨旁障碍物检测传感器沿轨道走向进行安装,根据车载障碍物检测传感器的检测距离以及线路曲线参数设计轨旁障碍物检测传感器的安装位置,使轨旁障碍物检测传感器与所述车载障碍物检测传感器的检测范围覆盖列车运行全部线路范围,所述轨旁障碍物检测传感器与所述cbtc信号系统的轨旁骨干网接口,进行车载障碍物检测传感器检测范围以外线路上的障碍物检测,将检测到的障碍物信息通过cbtc信号系统twc子系统上传至所述车载障碍物检测主机。
7、优选地,所述车载障碍物检测主机与所述cbtc信号系统的车载atc子系统以及twc子系统接口,进行智能运算与综合判断,对所述车载障碍物检测传感器和轨旁障碍物检测传感器检测到的障碍物信息进行智能运算与综合判断,得出障碍物的三维模型及所处位置信息,并发送到所述cbtc信号系统的车载atc子系统,以及通过twc子系统发送至轨旁atc子系统、轨旁cbi子系统及轨旁ats子系统。
8、优选地,所述cbtc信号系统的车载atc子系统根据车载障碍物检测主机发送的障碍物信息,结合列车当前运行速度与当前列车位置到障碍物之间的距离,判断障碍物是否影响正常行车,如有影响,则控制列车施加紧急制动或者常用制动,使列车在障碍物前停车。
9、优选地,所述cbtc信号系统的轨旁atc子系统、轨旁cbi子系统、轨旁ats子系统以及综合监控系统根据车载障碍物检测主机发送的障碍物信息,结合车载atc子系统发出的障碍物报警信息,执行移动授权变更、区段降级、障碍物实时显示以及启动障碍物清除应急联动机制。
10、本发明还提供一种轨道交通车地协同超视距障碍物检测方法,所述方法应用上述中的轨道交通车地协同超视距障碍物检测系统,所述方法包括如下步骤:
11、步骤s1:通过车载障碍物检测传感器和轨旁障碍物检测传感器在检测视距内是否发现障碍物;如发现障碍物,进入步骤s2,;如否,则进入步骤s7;
12、步骤s2:将障碍物信息上传至车载障碍物检测主机;
13、步骤s3:车载障碍物检测主机识别障碍物三维模型及所处位置信息,将障碍物三维模型及所处位置信息上传至车载atc子系统或者轨旁atc子系统、轨旁cbi子系统、轨旁ats子系统以及综合监控系统;
14、步骤s4:当将障碍物三维模型及所处位置信息上传至车载atc子系统时,车载atc子系统根据列车当前位置与速度,判断障碍物是否会对列车造成影响,如会,则车载atc子系统控制列车紧急制动或常用制动,在障碍物前停车;如否,则进入步骤s7;
15、步骤s5:当将障碍物三维模型及所处位置信息上传至轨旁atc子系统、轨旁cbi子系统、轨旁ats子系统以及综合监控系统时;结合车载atc子系统的障碍物报警信息,轨旁atc子系统、轨旁cbi子系统、轨旁ats子系统执行移动授权变更、区段封锁、障碍物实时显示及启动障碍物清除应急联动机制;
16、步骤s6:当障碍物已清除时,则进入步骤s7;当障碍物未被清除时,则返回步骤s5;
17、步骤s7:列车保持正常运行。
18、优选地,所述步骤s1中的车载障碍物检测传感器和轨旁障碍物检测传感器与车载障碍物检测主机接口,探测列车运行前方一定距离范围内存在障碍物,将检测到的障碍物信息上传到车载障碍物检测主机。
19、优选地,所述步骤s1中的轨旁障碍物检测传感器与cbtc信号系统的轨旁骨干网接口,进行车载障碍物检测传感器检测范围以外线路上的障碍物检测,将检测到的障碍物信息通过cbtc信号系统的twc子系统上传至车载障碍物检测主机。
20、优选地,所述步骤s2中的车载障碍物检测主机与cbtc信号系统的车载atc子系统以及twc子系统接口,进行智能运算与综合判断,对车载障碍物检测传感器和轨旁障碍物检测传感器检测到的障碍物信息进行智能运算与综合判断,得出障碍物的三维模型及所处位置信息,发送到cbtc信号系统的车载atc子系统,通过twc子系统发送至轨旁atc子系统、轨旁cbi子系统、轨旁ats子系统。
21、与现有技术相比,本发明具有如下的有益效果:
22、1、本发明结构合理,设计巧妙且效果显著,使用车载障碍物检测传感器与轨旁障碍物检测传感器相结合的方式,彼此互相补充扩大检测范围,使障碍物检测覆盖列车运行的全部线路;
23、2、本发明当检测到障碍物以后,不但通过将障碍物信息上传至车载atc系统触发列车安全制动停车功能,而且将障碍物信息上传至轨旁相关子系统,触发轨旁子系统的安全防护及故障联动功能,使车-地协同运作,在保证安全的同时提高障碍物处置效率。
- 还没有人留言评论。精彩留言会获得点赞!