道岔轨件自动识别定位方法及设备与流程
本发明属于道岔轨道检测,具体涉及一种道岔轨件自动识别定位方法及设备。
背景技术:
1、道岔是轨道中使列车可进行转线、跨线运行的重要轨道部分,道岔处构造复杂、道岔钢轨件的类型多,包括基本轨、连接轨、尖轨、护轨、翼轨、心轨等等,且轨件本身的结构也较为复杂,例如尖轨为弯曲的变截面轨件,且具有能够与基本轨贴合的结构。因此,道岔区的检测项目数量多,包括几何数据检测、各钢轨件的廓形检测和/轨面伤损检测、心轨前部的有害空间检测等等,检测时间长、难度大。
2、目前,主要是通过人工方式对道岔进行多项目的检测,检测人员携带相应的测量尺等工具前往对应的钢轨件处,按要求进行测量并记录数据,可见,检测效率很低,对检测人员的要求高,一旦检测人员记错了钢轨件类型等就易出现错漏。现有技术中,虽然存在一些道岔区的自动化检测方法,但这些方法仍有相应问题而难以在现场推广使用,其中最主要的问题是,缺乏可用于现场检测的、对道岔区多个钢轨件的自动识别分类及准确定位方法。例如,一些方法基于相机图像,通过神经网络识别分类钢轨件,这样的方法虽能实现一定程度的钢轨件自动分类,却无法得到钢轨件的准确物理位置(相机图像的像素坐标尺寸与实际物理尺寸有一定差异);另一些方法采集轨道轮廓数据或轨道图像,以此建立道岔区三维模型,并将其与标准三维模型匹配以得到钢轨件的分类结果或位置信息,这样的方法显然运算量非常大,难以用于现场检测。
3、因此,为能够实现自动化程度更高的、更为准确可靠的道岔区检测,需要一种能够对道岔区多个钢轨件进行自动识别分类及准确定位的方法。
技术实现思路
1、本发明是为解决上述问题而进行的,目的在于提供一种能够基于采集的轨道廓形数据对道岔的多个轨件进行自动识别、分类及定位的方法及设备,从而能够实现高自动化的轨道道岔检测,本发明采用了如下技术方案:
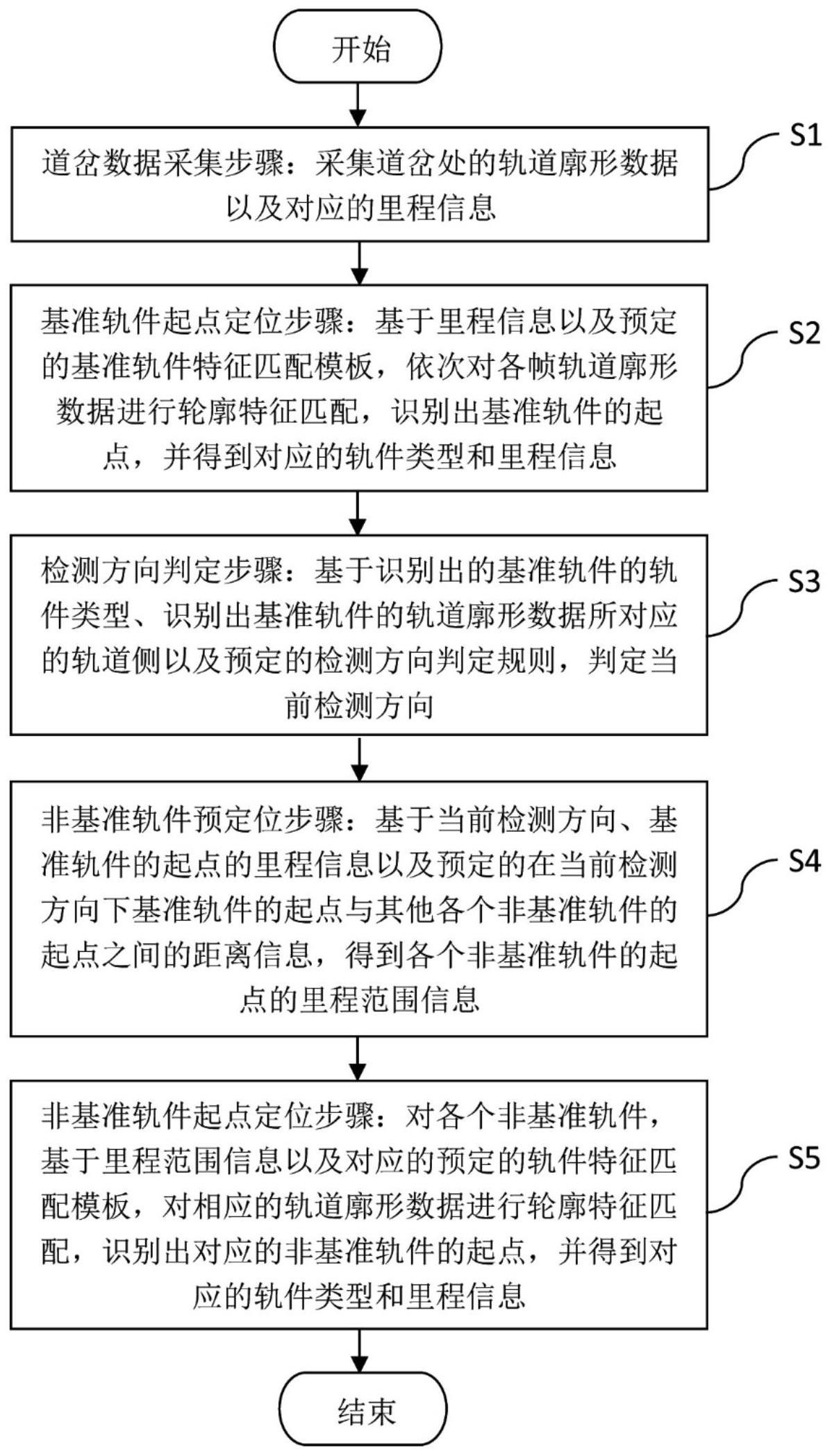
2、本发明提供了一种道岔轨件自动识别定位方法,用于基于采集的道岔的多帧轨道廓形数据以及对应的里程信息自动识别定位该道岔的多个轨件,其特征在于,所述多个轨件中的一个为用于作为检测起点的基准轨件,其他作为非基准轨件,该方法包括:基准轨件起点定位步骤:基于所述里程信息以及预定的基准轨件起点匹配模板,依次对各帧所述轨道廓形数据进行廓形特征匹配,识别出所述基准轨件的起点并得到对应的所述里程信息;非基准轨件预定位步骤:基于所述基准轨件的起点的里程信息以及预定的所述基准轨件的起点与其他各个所述非基准轨件的起点之间的距离信息,得到各个所述非基准轨件的起点的里程范围信息;非基准轨件起点定位步骤:对各个所述非基准轨件,基于所述里程范围信息提取出对应的所述轨道廓形数据,并基于提取出的所述轨道廓形数据以及该非基准轨件的起点的廓形特征,识别出相应的所述非基准轨件的起点并得到对应的轨件类型和所述里程信息。
3、本发明提供的道岔轨件自动识别定位方法,还可以具有这样的技术特征,其中,所述基准轨件起点匹配模板包括若干个预定位置范围及其对应的轨件类型、特征廓形截取算法、特征数据获取算法、标准特征数据,所述基准轨件起点定位步骤包括:基于所述里程信息依次提取各帧所述轨道廓形数据作为当前轨道廓形数据;判断在所述当前轨道廓形数据中的所述预定位置范围内是否有廓形数据,在判断为是时,基于对应的所述特征廓形截取算法对所述预定范围内的所述廓形数据进行廓形截取;基于截取出的廓形数据以及所述特征数据获取算法,计算对应的轨件的特征数据;判断所述特征数据是否与对应的所述标准特征数据相符,在判断为是时将对应的所述轨件类型作为所述基准轨件的轨件类型,并将该当前轨道廓形数据对应的所述里程信息作为所述基准轨件的起点的所述里程信息。
4、本发明提供的道岔轨件自动识别定位方法,还可以具有这样的技术特征,其中,所述基准轨件为尖轨,所述特征廓形截取算法用于截取出所述尖轨的内侧轨腰的廓形线以及轨底上端的廓形线,所述特征数据获取算法用于计算该两段廓形线之间的夹角,作为所述尖轨的起点的所述特征数据。
5、本发明提供的道岔轨件自动识别定位方法,还可以具有这样的技术特征,其中,所述基准轨件为护轨,所述特征廓形截取算法用于截取出所述护轨的轨头上端的廓形线以及轨头内侧的廓形线,所述特征数据获取算法用于计算该两段廓形线与预定的护轨特征廓形之间的相似度,作为所述护轨的起点的所述特征数据。
6、本发明提供的道岔轨件自动识别定位方法,还可以具有这样的技术特征,其中,所述非基准轨件至少包括心轨和翼轨,所述非基准轨件起点定位步骤包括:基于对应的所述里程范围信息分别从多帧所述轨道廓形数据中提取出所述心轨的起点对应的多帧所述轨道廓形数据、所述翼轨的起点对应的多帧所述轨道廓形数据;将所述心轨的起点对应的所述轨道廓形数据按对应的所述里程信息堆叠生成点云,并基于该点云,通过拟合平面方式识别出所述心轨的起点并得到对应的所述里程信息;基于所述里程信息以及预定的翼轨起点匹配模板,依次对所述翼轨的起点对应的多帧所述轨道廓形数据进行廓形匹配,识别出所述翼轨的起点并得到对应的所述里程信息。
7、本发明提供的道岔轨件自动识别定位方法,还可以具有这样的技术特征,其中,所述非基准轨件至少包括心轨和翼轨,所述非基准轨件起点定位步骤包括:基于对应的所述里程范围信息分别从多帧所述轨道廓形数据中提取出所述心轨的起点对应的多帧所述轨道廓形数据;将所述心轨的起点对应的所述轨道廓形数据按对应的所述里程信息堆叠生成点云,并基于该点云,通过拟合平面方式识别出所述心轨的起点并得到对应的所述里程信息;基于所述心轨的起点的所述里程信息以及预定的所述心轨的起点与所述翼轨的起点之间的距离信息,得到所述翼轨的起点的修正里程范围信息;基于所述修正里程范围信息分别从多帧所述轨道廓形数据中提取出所述翼轨的起点对应的多帧所述轨道廓形数据;基于所述里程信息以及预定的翼轨起点匹配模板,依次对所述翼轨的起点对应的多帧所述轨道廓形数据进行廓形匹配,识别出所述翼轨的起点并得到对应的所述里程信息。
8、本发明提供的道岔轨件自动识别定位方法,还可以具有这样的技术特征,其中,所述基准轨件为心轨,所述特征廓形截取算法用于截取出所述心轨的断面起点和理论起点之间的所述尖轨的上端面的廓形线,所述特征数据获取算法用于计算该廓形线的倾斜角度及长度,作为所述心轨的断面起点的所述特征数据。
9、本发明提供的道岔轨件自动识别定位方法,还可以具有这样的技术特征,其中,所述基准轨件起点定位步骤还包括:判断识别出的所述基准轨件的类型是否为心轨,在判断为是时,基于所述当前轨道廓形数据对应的所述里程信息以及预定的所述心轨的断面起点到其理论起点的距离信息,提取出所述心轨的理论起点对应的多帧所述轨道廓形数据;将提取出的多帧所述轨道廓形数据按其所述里程信息堆叠生成点云,并基于该点云,通过拟合平面方式识别出所述心轨的理论起点,并得到对应的里程信息,作为所述基准轨件的起点的所述里程信息。
10、本发明提供的道岔轨件自动识别定位方法,还可以具有这样的技术特征,其中,通过拟合平面方式识别出所述心轨的起点包括以下步骤:基于ransac算法拟合所述心轨起点处的斜面;基于所述ransac算法拟合所述心轨起点前的平面;计算所述斜面和所述平面的相交线的坐标,或是分别计算所述斜面的中心线和所述平面的中心线,并计算该两个中心线的交点的坐标;基于所述相交线的坐标或所述交点的坐标,得到对应的所述里程信息,作为所述心轨的起点的所述里程信息。
11、本发明提供的道岔轨件自动识别定位方法,还可以具有这样的技术特征,在所述基准轨件起点获取步骤之后,还包括:检测方向判定步骤:基于识别出的所述基准轨件的轨件类型、识别出该基准轨件的所述轨道廓形数据对应的轨件方位以及预定的检测方向判定规则,判定当前检测方向,所述当前检测方向为所述道岔的多个通行方向的其中之一,其中,所述其他轨件预定位步骤中,基于所述当前检测方向、所述基准轨件的起点的里程信息以及所述距离信息,得到在所述当前检测方向下各个所非基准述轨件的轨件类型以及各个所述非基准轨件的起点的所述里程范围信息。
12、本发明提供的道岔轨件自动识别定位方法,还可以具有这样的技术特征,其中,所述道岔为单开道岔,具有四个所述通行方向,所述轨道廓形数据通过轨道检测设备获取,所述轨道检测设备包括第一检测单元和第二检测单元,分别用于获取轨道两侧的轨件的所述轨道廓形数据,所述检测方向判定规则包括:当识别出的所述基准轨件的轨件类型为斥离状态的尖轨、且识别出所述基准轨件的所述轨道廓形数据来自所述第一检测单元时,判定为所述当前检测方向为直行经过所述道岔的第一方向;当识别出的所述基准轨件的类型为闭合状态的尖轨、且识别出所述基准轨件的所述轨道廓形数据来自所述第一检测单元时,判定为所述当前检测方向为由轨道直股转辙进入轨道曲股的第二方向;当识别出的所述基准轨件的类型为护轨、且识别出所述基准轨件的所述轨道廓形数据来自所述第二检测单元时,判定为所述当前检测方向为与所述第一方向相反的第三方向;当识别出的所述基准轨件的类型为护轨、且识别出所述基准轨件的所述轨道廓形数据来自所述第一检测单元时,判定为所述当前检测方向为与所述第二方向相反的第四方向。
13、本发明提供了一种道岔轨件自动识别定位设备,用于基于采集的道岔的多帧轨道廓形数据以及对应的里程信息自动识别定位该道岔的多个轨件,其特征在于,所述多个轨件中的一个为用于作为检测起点的基准轨件,其他作为非基准轨件,该设备包括:基准轨件起点定位部,基于所述里程信息以及预定的基准轨件特征匹配模板,依次对各帧所述轨道廓形数据进行轮廓特征匹配,识别出所述基准轨件的起点并得到对应的所述里程信息;非基准轨件预定位部,基于所述基准轨件的起点的里程信息以及预定的所述基准轨件的起点与各个所述非基准轨件的起点之间的距离信息,得到各个所述非基准轨件的起点的里程范围信息;以及非基准轨件起点定位部,对各个所述非基准轨件,基于所述里程范围信息提取出对应的所述轨道廓形数据,并基于提取出的所述轨道廓形数据以及该非基准轨件的起点的廓形特征,识别出该非基准轨件的起点并得到对应的轨件类型和所述里程信息。
14、发明作用与效果
15、根据本发明的道岔轨件自动识别定位方法及设备,该方法包括基准轨件起点定位步骤、非基准轨件预定位步骤、非基准轨件起点定位步骤,在基于里程信息和匹配模板自动识别出作为检测起点的基准轨件的起点后,可基于基准轨件的起点和预设的基准轨件起点和其他非基准轨件起点间的距离推理得到非基准轨件起点的位置范围,再基于该位置范围提取相应的轨道廓形数据,进一步检测各个非基准轨件的准确起点位置,这样一来,可以自动地确定道岔各个轨件的类型及其起点的具体位置,即实现道岔多轨件的自动识别分类和起点定位,在此基准上,就可以对各轨件进一步自动调用相应的检测算法,从而实现道岔轨件的高度自动化检测。此外,由于进行了非基准轨件的预定位,仅需提取推理出的小范围内的轨道廓形数据来进一步检测非基准轨件的准确起点位置,因此该方法的计算量小,非常有利于现场检测的应用。
- 还没有人留言评论。精彩留言会获得点赞!