一种井下矿用有轨机车无人驾驶系统的制作方法
本发明涉及路径规划,具体涉及一种井下矿用有轨机车无人驾驶系统。
背景技术:
1、井下矿用有轨机车无人驾驶系统是一种应用于矿山运输的自动化技术,旨在提高矿山运输的安全性、效率和可靠性。该系统通过集成先进的传感器、控制器和通信技术,实现对矿用有轨机车的自动驾驶和远程控制;
2、现有的一种井下矿用有轨机车无人驾驶系统,其是通过对有轨机车进行路径规划,将规划好的最优路径输入到有轨机车中,由有轨机车按照规划好的最优路径进行行驶,在其过程中,对有轨机车的路径规划是基于其的出发点和目的地,同时考虑路径最短、矿井内部结构、障碍物分布等条件;
3、然而由于井下环境的特殊性,如光照条件差、无线传输衰减大、无卫星信号;在矿井环境中,特别是在一些偏远或深层的区域,可能存在无线通信网络覆盖不全面的问题。如果不考虑路径中各个区域的数据传输环境,当机车行驶到这些区域,可能会因为信号弱或中断而导致数据丢失;井下高湿度、易爆的环境可能对机车的电子设备造成干扰,影响数据的完整性和可靠性的问题;
4、为了解决上述问题,本发明提出了一种解决方案。
技术实现思路
1、本发明的目的在于提供一种井下矿用有轨机车无人驾驶系统,为了解决现有技术中在对有轨机车进行路径规划的过程中如果不考虑路径中各个区域的数据传输环境,当机车行驶到这些区域,可能会因为信号弱或中断而导致数据丢失;井下高湿度、易爆的环境可能对机车的电子设备造成干扰,影响数据的完整性和可靠性的问题。
2、本发明的目的可以通过以下技术方案实现:
3、一种井下矿用有轨机车无人驾驶系统,包括:
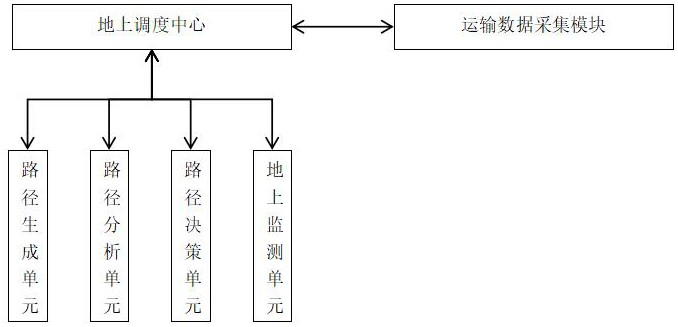
4、地上调度中心,用以调度有轨机车执行运输任务,所述地上调度中心包括路径生成单元、路径决策单元和地上监测单元;
5、针对当前时刻一辆预执行运输任务的有轨机车,路径生成单元为其生成多条可能的行驶路径,并为每个可能的行驶路径进行路径评分;
6、路径决策单元从生成的多条可能的行驶路径中选定一条行驶路径作为其此次预执行运输任务的任务行驶路径;
7、地上监测单元中存储有所有有轨机车执行完成对应运输任务的运输数据。
8、进一步的,针对一辆开始执行运输任务的有轨机车,运输数据采集模块对该有轨机车行驶过程中的运输采集数据进行实时采集并传输到地上监测单元,由地上监测单元在其执行完成对应运输任务后将接收到的所有运输数据进行合并得到该有轨机车执行完成此次运输任务的运输数据;
9、有轨机车行驶过程中的运输采集数据包括有轨机车的姿态信息、任务行驶路径、装载点和卸料点的位置信息。
10、进一步地,路径决策单元中预存储有决策信号值,决策信号量的值从0或1中选定,初始的决策信号量的值为0。
11、本发明的有益效果:
12、(1)本发明通过设置路径生成单元对一辆预执行运输任务的有轨机车从当前时刻所有正在执行运输任务的有轨机车行驶过程中的运输采集数据、井下矿区的地形、轨道布设位置、有轨机车速度、载重等多方面为该有轨机车此次预执行运输任务生成多条可能的行驶路径,同时结合行驶路径中两两坐标点之间的数据传输丢包率和数据容量大小两方面,对每条行驶路进行综合评定,确定最优的行驶路径,通过这种方式,可以有效地避免有轨机车在行驶过程中因为信号弱或中断而导致数据丢失;井下高湿度、易爆的环境可能对机车的电子设备造成干扰,影响数据的完整性和可靠性的问题。
13、(2)本发明通过路径分析单元对行驶路径中两两坐标点之间的数据传输均量和数据丢包均量,计算这多条可能的行驶路径的路径评估量,并从中选定值最小的路径评估量对应的行驶路径作为该有轨机车此次预执行运输任务的任务行驶路径,通过同时考虑数据传输均量和数据丢包均量,使最终的选定结果更加的准确。
技术特征:
1.一种井下矿用有轨机车无人驾驶系统,其特征在于,包括:
2.根据权利要求1所述的一种井下矿用有轨机车无人驾驶系统,其特征在于,路径生成单元生成的行驶路径表现为一系列连续的坐标点,一个坐标点对应一个经纬度坐标。
3.根据权利要求1所述的一种井下矿用有轨机车无人驾驶系统,其特征在于,针对一辆开始执行运输任务的有轨机车,运输数据采集模块对该有轨机车行驶过程中的运输采集数据进行实时采集并传输到地上监测单元,由地上监测单元在其执行完成对应运输任务后将接收到的所有运输采集数据进行合并得到该有轨机车执行完成此次运输任务的运输数据;
4.根据权利要求1所述的一种井下矿用有轨机车无人驾驶系统,其特征在于,路径决策单元中预存储有决策信号值,决策信号量的值从0或1中选定,初始的决策信号量的值为0。
5.根据权利要求1所述的一种井下矿用有轨机车无人驾驶系统,其特征在于,路径决策单元初次存储交互分析数据时,修改其内决策信号量的值为1,此后一直保持不变。
6.根据权利要求4所述的一种井下矿用有轨机车无人驾驶系统,其特征在于,路径决策单元基于其内预存储的决策信号量的值,从当前时刻路径生成单元为该辆预执行运输任务的有轨机车生成的多条可能的行驶路径中选定一条行驶路径作为其此次预执行运输任务的任务行驶路径。
7.根据权利要求6所述的一种井下矿用有轨机车无人驾驶系统,其特征在于,当决策信号量的值为0时,从生成的多条可能的行驶路径中选取其中路径分数最高的一条可能的行驶路径作为该有轨机车此次预执行运输任务的任务行驶路径。
8.根据权利要求6所述的一种井下矿用有轨机车无人驾驶系统,其特征在于,当决策信号量的值为1时,则获取其内当前存储的若干运输组合的交互分析数据,按照预设路径决策规则选定该有轨机车此次预执行运输任务的任务行驶路径,预设路径决策规则如下:
技术总结
本发明公开了一种井下矿用有轨机车无人驾驶系统,涉及路径规划技术领域,本发明通过设置路径生成单元对一辆预执行运输任务的有轨机车从当前时刻所有正在执行运输任务的有轨机车行驶过程中的运输采集数据、井下矿区的地形、轨道布设位置、有轨机车速度、载重等多方面为该有轨机车此次预执行运输任务生成多条可能的行驶路径,同时结合行驶路径中两两坐标点之间的数据传输丢包率和数据容量大小两方面,对每条行驶路进行综合评定,确定最优的行驶路径,通过这种方式,可以有效地避免有轨机车在行驶过程中因为信号弱或中断而导致数据丢失;井下高湿度、易爆的环境可能对机车的电子设备造成干扰,影响数据的完整性和可靠性的问题。
技术研发人员:张勇
受保护的技术使用者:湘潭东升电气制造有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!