转向控制装置的制作方法
1.本发明涉及转向控制装置。
背景技术:
2.作为车辆转向装置,已知有包括使用电机来作为驱动源的致动器的电动助力转向装置(eps)。一些类型的eps获取方向盘的作为具有超过360
°
的范围的绝对值的转向角,并且基于转向角执行各种控制。作为控制的示例,日本未审查专利申请公开第2015-20506(jp 2015-20506a)号和日本专利第5962881号公开了以下eps:这些eps每个执行用于缓和例如作为齿条轴的端部的齿条端部抵靠在齿条壳体上的所谓“端部抵靠”的冲击的端部抵靠缓和控制。jp 2015-20506a中的eps通过使用基于转向角的转向反作用分量来校正与要由电机输出的电机扭矩的目标值对应的电流命令值,来缓和端部抵靠的冲击。日本专利第5962881号中的eps通过将与要由电机输出的电机扭矩的目标值对应的电流命令值限制到等于或小于基于转向角的限制值,来缓和端部抵靠的冲击。
技术实现要素:
3.例如,在驾驶员在低摩擦道路上以高速执行转向的情况下,即使当与上述配置类似地执行端部抵靠缓和控制时,齿条端部有时也会与齿条壳体碰撞。在这种情况下,以高速旋转的电机突然停止,并且因此在电机中生成的反向电压快速减小。反向电压的减小早于由于电流命令值的减小而引起的电压命令值的减小。因此,电压被暂时施加至电机,导致发生过冲(overshoot),在过冲中,供应至电机的电流的实际电流值变得大于电流命令值。作为结果,不能充分缓和端部抵靠的冲击,使得转向装置的零部件上的载荷会增加。
4.本发明提供一种可以抑制被供应至电机的电流的过冲的转向控制装置。
5.根据本发明的各方面的转向控制装置包括控制电路和驱动电路。控制电路被配置成控制转向装置并输出电机控制信号,转向装置包括壳体、包含在该壳体中以能够往复移动的转弯轴、以及被配置成给予电机扭矩的致动器,通过该电机扭矩,转弯轴使用电机作为驱动源来往复移动。控制电路被配置成检测由具有超过360
°
的范围的绝对角来指示的绝对转向角,所述绝对转向角是旋转轴的旋转角并且能够被转换成与转弯轴耦接的转弯轮的转弯角。控制电路被配置成计算与要由电机输出的电机扭矩的目标值对应的电流命令值。控制电路被配置成执行电流反馈计算,通过该电流反馈计算,要被供应至电机的电流的实际电流值跟随电流命令值。控制电路被配置成生成电机控制信号。控制电路被配置成存储与绝对转向角相关联的端部位置对应角,所述端部位置对应角是指示转弯轴的移动受到其中转弯轴抵靠在壳体上的端部抵靠的限制的端部位置的角。控制电路被配置成:当端部间隔角等于或小于预定角时,执行端部抵靠缓和控制以校正电流命令值使得限制端部间隔角的减小,端部间隔角指示绝对转向角距端部位置对应角的距离。控制电路被配置成当在执行端部抵靠缓和控制期间发生实际电流值的过冲时,调整在电流反馈计算中使用的控制增益,使得控制增益增大。驱动电路被配置成基于电机控制信号向电机供应驱动电力。
6.利用根据本发明的各方面的转向控制装置,在执行所述端部抵靠缓和控制期间发生了实际电流值的过冲时,控制增益增大。由此,实际电流值对电流命令值的响应性变高,并且因此能够抑制被供应至电机的电流的过冲。
7.在根据本发明的各方面的转向控制装置中,控制电路可以被配置成当端部间隔角等于或小于预定角时,计算基于端部间隔角的减小而减小的转向角限制值。控制电路可以被配置成将作为电流命令值的绝对值的上限的限制值设置成等于或小于转向角限制值的值。控制电路可以被配置成通过将电流命令值的绝对值限制为转向角限制值来执行端部抵靠缓和控制。
8.利用根据本发明的各方面的转向控制装置,当以将电流命令值的绝对值被限制为转向角限制值的方式执行端部抵靠缓和控制时,能够抑制实际电流值的过冲。在该配置中,即使当电流命令值被限制到最大程度时,电流命令值的绝对值也至多仅为零。因此,通过调整控制增益来抑制过冲的效果比较高。
9.在根据本发明的各方面的转向控制装置中,控制电路可以被配置成在执行端部抵靠缓和控制期间调整开始条件被满足时,确定发生实际电流值的过冲,并且调整控制增益使得控制增益增加,所述调整开始条件包括电流命令值与实际电流值之间的电流偏差的绝对值为等于或大于预设的第一电流偏差阈值的条件。
10.利用根据本发明的各方面的转向控制装置,通过在电流偏差与第一电流偏差阈值之间执行大小比较,能够准确地确定实际电流值的过冲的发生。在根据本发明的各方面的转向控制装置中,除了电流偏差的绝对值等于或大于第一电流偏差阈值的条件之外,调整开始条件还可以包括电机的角速度的绝对值等于或大于预设的角速度阈值的条件。
11.利用根据本发明的各方面的转向控制装置,能够准确地感知由于端部抵靠的发生造成实际电流值发生过冲的情况,并且能够提高控制增益,以及能够适当地抑制过冲。在根据本发明的各方面的转向控制装置中,除了电流偏差的绝对值等于或大于第一电流偏差阈值的条件之外,调整开始条件还可以包括电机的角速度变化量的绝对值等于或大于预设的角速度变化量阈值的条件。
12.利用根据本发明的各方面的转向控制装置,能够准确地感知由于端部抵靠的发生造成实际电流值发生过冲的情况,并且能够提高控制增益,以及能够适当地抑制过冲。在根据本发明的各方面的转向控制装置中,控制电路可以被配置成当在控制电路调整控制增益使得控制增益增大之后取消条件被满足时,取消控制增益的调整。
13.当控制增益增大并且由此实际电流值对电流命令值的响应性变高时,电机对例如电流命令值的微小变化敏感地作出反应,使得会产生振动或异常噪声。在这一点上,当取消条件被满足时,根据本发明的各方面的转向控制装置取消控制增益为大的状态,即,响应性为高的状态。因此,当由于实际电流值的过冲的减小而不需要高响应性时,可以抑制控制增益保持为大,并且可以抑制产生振动或异常噪声。
14.在根据本发明的各方面的转向控制装置中,取消条件可以包括电流偏差的绝对值等于或小于预设的第二电流偏差阈值的条件,其中预设的第二电流偏差阈值小于第一电流偏差阈值。
15.利用根据本发明的各方面的转向控制装置,能够抑制在实际电流值的过冲大的状态下控制增益的调整被取消。在根据本发明的各方面的转向控制装置中,取消条件可以包
括控制增益为大的状态持续达预定时间的条件。
16.实际电流值的过冲不仅由电机的突然停止所引起的反向电压的快速降低引起,而且由实际电流值对由于执行端部抵靠缓和控制所引起的电流命令值的快速降低的响应的延迟引起。当由于实际电流值的响应性所引起的过冲而使调整开始条件被满足时,调整控制增益以使其增大,并且由此可以抑制过冲。在由于执行端部抵靠缓和控制而电流命令值降低的时间处,发生由实际电流值的响应性引起的过冲,并且在由于端部抵靠而使电机停止之后,发生由反向电压的降低引起的过冲。因此,假设在执行端部抵靠缓和控制期间发生端部抵靠的情况下,在实际电流值的响应性引起的过冲发生之后,电流偏差的绝对值减小一次,并且然后由于反向电压快速降低引起发生过冲,电流偏差的绝对值再次增加。作为结果,例如,如果仅基于电流偏差的绝对值等于或小于第二电流偏差阈值的条件来取消控制增益的调整,则存在控制增益的值重复增加和减小的担心。在这一点上,利用根据本发明的各方面的转向控制装置,控制增益为大的状态持续达预定时间。因此,可以防止控制增益被频繁切换,并且抑制转向感觉变差。
17.利用根据本发明的各方面的转向控制装置,可以抑制被供应至电机的电流的过冲。
附图说明
18.下面将参考附图来描述本发明的示例性实施方式的特征、优点以及技术意义和工业意义,在附图中,相同的附图标记表示相同的元素,并且在附图中:
19.图1是电动助力转向装置的示意图;
20.图2是转向控制装置的框图;
21.图3是限制值设置单元的框图;
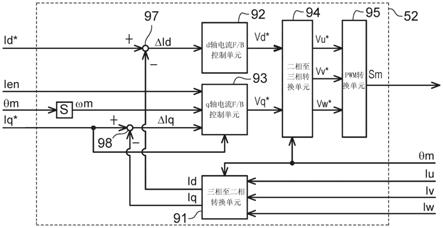
22.图4是电机控制信号生成单元的框图;
23.图5是表示通过q轴电流f/b控制单元调整比例增益和积分增益的处理过程的流程图;以及
24.图6是示出在端部抵靠发生之前和之后q轴电流命令值、q轴实际电流值和电机角速度的变化的示例的曲线图。
具体实施方式
25.下面将参照附图描述转向控制装置的实施方式。如图1所示,作为由转向控制装置1控制的转向装置的电动助力转向装置(eps)2包括基于驾驶员对方向盘3的操作而使转弯轮(turning wheel)4转弯的转向机构5。eps 2包括作为向转向机构5给予用于辅助转向操作的辅助力的致动器的eps致动器6。
26.转向机构5包括方向盘3被固定至的转向轴11、与转向轴11耦接的作为转弯轴的齿条轴12、作为齿条轴12被插入其中以能够进行往复移动的壳体的齿条壳体13、以及将转向轴11的旋转转换为齿条轴12的移动的齿条齿轮机构14。通过从方向盘3的位置按顺序耦接柱轴15、中间轴16和齿轮轴17来构造转向轴11。
27.齿条轴12和齿轮轴17以预定的交叉角布置在齿条壳体13中。齿条齿轮机构14通过啮合在齿条轴12上形成的齿条齿12a与在齿轮轴17上形成的齿轮齿17a来构造。拉杆19通过
设置在齿条轴12的端部的球形接头构成的齿条端部18可旋转地耦接至齿条轴12的两端。该拉杆19的远端耦接至转弯轮4所附接至的未图示的转向节(knuckle)。因此,在eps 2中,由于转向操作而产生的转向轴11的旋转通过齿条齿轮机构14转换成齿条轴12的轴向移动,并且该轴向移动通过拉杆19传递至转向节,使得转弯轮4的转弯角即车辆的行驶方向被改变。
28.齿条轴12的其中齿条端部18抵靠在齿条壳体13的左端部上的位置是允许最大向右转向的位置,并且该位置对应于作为右侧的端部位置的齿条端部位置。此外,齿条轴12的其中齿条端部18抵靠在齿条壳体13的右端部的位置是允许最大向左转向的位置,并且该位置对应于作为左侧的端部位置的齿条端部位置。
29.eps致动器6包括作为驱动源的电机21和减速器22例如蜗杆和蜗轮机构。电机21通过减速器22耦接至柱轴15。eps致动器6利用减速器22降低电机21的旋转速度,然后将电机21的旋转传递到柱轴15。从而,eps致动器6向转向机构5给予电机扭矩作为辅助力。在本实施方式中,采用三相无刷电机作为电机21。
30.转向控制装置1连接至电机21,并且控制电机21的动作。转向控制装置1包括未图示的中央处理单元(cpu)和未图示的存储器,并且cpu以预定计算周期执行存储在存储器中的程序。由此,执行各种控制。
31.转向控制装置1连接至检测车辆的车速spd的车速传感器31和检测由于驾驶员的转向而向转向轴11给予的转向扭矩th的扭矩传感器32。转向控制装置1连接至旋转传感器33,该旋转传感器33检测作为360
°
范围内的相对角的电机21的旋转角θm。例如,在向右转向的情况下,转向扭矩th和旋转角θm被检测为正值,并且在向左转向的情况下,转向扭矩th和旋转角θm被检测为负值。转向控制装置1基于从传感器输入并且指示状态量的信号向电机21供应驱动电力,并且从而控制eps致动器6的动作,即,控制向转向机构5给予的用于使齿条轴12往复移动的辅助力。
32.接下来,将描述转向控制装置1的配置。如图2所示,转向控制装置1包括:作为输出电机控制信号sm的控制电路的微型计算机41;以及基于电机控制信号sm向电机21供应驱动电力的驱动电路42。作为本实施方式中的驱动电路42,采用包括多个开关元件例如fet的公知的pwm逆变器。由微型计算机41输出的电机控制信号sm指定每个开关元件的导通状态或关断状态。由此,响应于电机控制信号sm,每个开关元件接通或断开,并且切换针对各个相的电机线圈的通电模式,使得车载电源43的直流电力被转换成三相驱动电力,并且该三相驱动电力被输出至电机21。
33.以下描述的控制块通过由微型计算机41执行的计算机程序来实现。以预定的采样周期检测状态量,并且以预定的计算周期执行以下描述的控制块所指示的计算过程。
34.微型计算机41接收车速spd、转向扭矩th和电机21的旋转角θm。此外,微型计算机41接收电机21的各个相中的电流值iu、iv、iw和车载电源43的电源电压vb,其中电流值iu、iv、iw是由电流传感器44检测的电流值,而车载电源43的电源电压vb是由电压传感器45检测的电源电压。电流传感器44设置在驱动电路42与用于各个相的电机线圈之间的连接线46上。电压传感器45设置在车载电源43与驱动电路42之间的连接线47上。在图2中,为了便于描述,用于各个相的电流传感器44和用于各个相的连接线46分别被示出为单个电流传感器44和单个连接线46。微型计算机41基于状态量来输出电机控制信号sm。
35.更具体而言,微型计算机41包括计算电流命令值id
*
、iq
*
的电流命令值计算单元
51、基于电流命令值id
*
、iq
*
输出电机控制信号sm的电机控制信号生成单元52、以及检测绝对转向角θs的绝对转向角检测单元53。
36.电流命令值计算单元51接收转向扭矩th、车速spd以及绝对转向角θs。电流命令值计算单元51基于状态量来计算电流命令值id
*
、iq
*
。电流命令值id
*
、iq
*
是应供应至电机21的电流的目标值,并且分别指示d/q坐标系中的d轴上的电流命令值和q轴上的电流命令值。q轴电流命令值iq
*
指示由电机21输出的电机扭矩的目标值。在本实施方式中,d轴电流命令值id
*
基本上固定为零。例如,电流命令值id
*
、iq
*
在辅助向右转向的情况下为正值,在辅助向左转向的情况下为负值。
37.电机控制信号生成单元52接收电流命令值id
*
、iq
*
、各个相中的电流值iu、iv、iw、电机21的旋转角θm以及随后描述的转向角限制值ien。电机控制信号生成单元52基于这些状态量通过在d/q坐标系中执行电流反馈控制来生成电机控制信号sm,并将电机控制信号sm输出至驱动电路42。由此,将与电机控制信号sm对应的驱动电力供应至电机21。然后,从电机21输出与q轴电流命令值iq
*
对应的电机扭矩,向转向机构5给予辅助力。
38.绝对转向角检测单元53接收旋转角θm。绝对转向角检测单元53基于旋转角θm检测表示为具有超过360
°
的范围的绝对角的电机绝对角。在本实施方式中的绝对转向角检测单元53将在首次接通启动开关例如点火开关——例如更换车载电源43之后首次接通启动开关例如点火开关——时的旋转角θm设置为起始点,将电机21的转数加起来,并且基于该转数(rotation number)和旋转角θm来检测电机绝对角。绝对转向角检测单元53通过将电机绝对角乘以基于减速器22的减速比的转换因子来检测指示转向轴11的转向角的绝对转向角θs。在实施方式中的转向控制装置1即使在启动开关处于关断状态时也监测电机21是否旋转,并且将所有时间的电机21的转数加起来。因此,即使在更换车载电源43之后第二次接通启动开关时,绝对转向角θs的起始点与当首次接通启动开关时设置的起始点相同。
39.如上所描述,通过转向轴11的旋转而使转弯轮4的转弯角发生变化,并且因此绝对转向角θs指示能够变换为转弯轮4的转弯角的旋转轴的旋转角。例如,电机绝对角和绝对转向角θs在关于起始点为向右旋转的情况下为正值,并且在关于起始点为向左旋转的情况下为负值。
40.接下来,将详细描述电流命令值计算单元51的配置。电流命令值计算单元51包括对作为q轴电流命令值iq
*
的基本分量的辅助命令值ias
*
进行计算的辅助命令值计算单元61。另外,电流命令值计算单元51包括:设置作为q轴电流命令值iq
*
的绝对值的上限的限制值ig的限制值设置单元62;以及将辅助命令值ias
*
的绝对值限制为等于或小于限制值ig的值的保护处理单元63。限制值设置单元62连接至存储器64。
41.辅助命令值计算单元61接收转向扭矩th和车速spd。辅助命令值计算单元61基于转向扭矩th和车速spd来计算辅助命令值ias
*
。具体地,随着转向扭矩th的绝对值增加以及车速spd减小,辅助命令值计算单元61计算具有更大绝对值的辅助命令值ias
*
。以这种方式计算出的辅助命令值ias
*
被输出至保护处理单元63。
42.除了辅助命令值ias
*
之外,保护处理单元63还接收后面描述的在限制值设置单元62中设置的限制值ig。当输入的辅助命令值ias
*
的绝对值等于或小于限制值ig时,保护处理单元63将辅助命令值ias
*
的值无变化地作为q轴电流命令值iq
*
输出至电机控制信号生成单元52。另一方面,当输入的辅助命令值ias
*
的绝对值大于限制值ig时,保护处理单元63将
通过将辅助命令值ias
*
的绝对值限制为限制值ig而得到的值作为q轴电流命令值iq
*
输出至电机控制信号生成单元52。
43.在存储器64中,存储有与预先设置为电机21能够输出的电机扭矩的额定扭矩对应的额定电流ir、端部位置对应角θs_le、θs_re等。左侧的端部位置对应角θs_le为对应于左侧的齿条端部位置的绝对转向角θs,而右侧的端部位置对应角θs_re为对应于右侧的齿条端部位置的绝对转向角θs。例如,通过基于由驾驶员的转向而适当地执行的学习来设置端部位置对应角θs_le、θs_re。
44.接下来,将描述限制值设置单元62的配置。限制值设置单元62接收绝对转向角θs、车速spd、电源电压vb、额定电流ir以及端部位置对应角θs_le、θs_re。限制值设置单元62基于状态量设置限制值ig。
45.更具体地,如图3所示,限制值设置单元62包括基于绝对转向角θs计算转向角限制值ien的转向角限制值计算单元71、基于电源电压vb计算作为另一限制值的电压限制值ivb的电压限制值计算单元72、以及选择转向角限制值ien和电压限制值ivb中较小的一个的最小值选择单元73。
46.转向角限制值计算单元71接收绝对转向角θs、车速spd、额定电流ir以及端部位置对应角θs_le、θs_re。当指示绝对转向角θs距端部位置对应角θs_le、θs_re的距离的端部间隔角δθ等于或小于如后所描述的预定角θ1时,转向角限制值计算单元71基于状态量计算基于端部间隔角δθ的减小而减小的转向角限制值ien。以这种方式计算出的转向角限制值ien被输出至最小值选择单元73。
47.电压限制值计算单元72接收电源电压vb。当电源电压vb的绝对值等于或小于预设电压阈值vth时,电压限制值计算单元72计算小于用于供应额定电流ir的额定电压的电压限制值ivb。具体地,当电源电压vb的绝对值等于或小于电压阈值vth时,电压限制值计算单元72基于电源电压vb的绝对值的减小,计算具有较小绝对值的电压限制值ivb。这样计算出的电压限制值ivb被输出至最小值选择单元73。
48.最小值选择单元73选择被输入的转向角限制值ien和电压限制值ivb中的较小的一者作为限制值ig,并将该较小的一者输出至保护处理单元63。在转向角限制值ien作为限制值ig被输出至保护处理单元63的情况下,q轴电流命令值iq
*
的绝对值被限制为转向角限制值ien。由此,在端部间隔角δθ为等于或小于预定角度θ1时,q轴电流命令值iq
*
的绝对值随着端部间隔角δθ的减小而减小,使得端部抵靠缓和控制被执行。端部抵靠缓和控制缓和了其中齿条端部18与齿条壳体13碰撞的端部抵靠的冲击。
49.在电压限制值ivb作为限制值ig输出至保护处理单元63的情况下,q轴电流命令值iq
*
的绝对值被限制为电压限制值ivb。由此,当电源电压vb的绝对值等于或小于电压阈值vth时,执行电源保护控制。通过电源保护控制,q轴电流命令值iq
*
的绝对电压基于电源电压vb的绝对值的减小而减小。
50.接下来,将描述转向角限制值计算单元71的配置。转向角限制值计算单元71包括计算端部间隔角δθ的端部间隔角计算单元81以及计算作为取决于端部间隔角δθ而决定的电流限制量的角限制分量iga的角限制分量计算单元82。另外,转向角限制值计算单元71包括:计算作为转向速率ωs相对于上限角速度ωlim的超过量的超过量角速度ωo的超过量角速度计算单元83;以及计算作为取决于超过量角速度ωo而决定的电流限制量的速度
限制分量igs的速度限制分量计算单元84。
51.端部间隔角计算单元81接收绝对转向角θs和端部位置对应角θs_le、θs_re。端部间隔角计算单元81计算上个计算周期(the last computation cycle)中的绝对转向角θs与左侧的端部位置对应角θs_le之间的差以及上个计算周期中的绝对转向角θs与右侧的端部位置对应角θs_re之间的差。然后,端部间隔角计算单元81将计算出的差中的较小的一个的绝对值作为端部间隔角δθ输出至角限制分量计算单元82和超过量角速度计算单元83。
52.角限制分量计算单元82接收端部间隔角δθ和车速spd。角限制分量计算单元82包括决定端部间隔角δθ、车速spd和角限制分量iga之间关系的映射,并且通过参照该映射来计算与端部间隔角δθ和车速spd对应的角限制分量iga。
53.在该映射中,角限制分量iga被设置为与端部间隔角δθ从零开始的增大成比例地减小,并且当端部间隔角δθ变得大于预定角θ1时变为零。在该映射中,还设置端部间隔角δθ为负的区域。当端部间隔角δθ小于零时,角限制分量iga与端部间隔角δθ的减小成比例地增大,并且在角限制分量iga变为与额定电流ir相同的大小之后是恒定的。在该映射的负区域中,考虑了在齿条端部18抵靠在齿条壳体13上的状态下通过在相同方向上进一步执行转向而由eps 2的弹性变形引起的电机21的旋转。预定角θ1被设置为指示端部位置对应角θs_le、θs_re附近的范围的小角。即,角限制分量iga被设置为随着绝对转向角θs相对于端部位置对应角θs_le、θs_re越靠近转向中立侧则越小,并且当绝对转向角θs超过端部位置对应角θs_le、θs_re附近而位于转向中立侧时则为零。
54.此外,在该映射中,在其中端部间隔角δθ等于或小于预定角θ1的区域中,角限制分量iga被设置为基于车速spd的增大而减小。具体地,在车速spd为低速的区域中,角限制分量iga被设置为大于零,并且在车速spd为中速或高速的区域中,角限制分量iga被设置为零。以这种方式计算的角限制分量iga被输出至减法器85。
55.超过量角速度计算单元83接收端部间隔角δθ以及转向速率ωs。转向速率ωs是通过对绝对转向角θs进行微分而获得的。超过量角速度计算单元83基于状态量计算超过量角速度ωo。
56.更具体地,超过量角速度计算单元83包括计算上限角速度ωlim的上限角速度计算单元86。上限角速度计算单元86接收端部间隔角δθ。上限角速度计算单元86包括决定端部间隔角δθ和上限角速度ωlim的关系的映射,并通过参照该映射来计算与端部间隔角δθ对应的上限角速度ωlim。
57.在该映射中,上限角速度ωlim被设置为使得当端部间隔角δθ为零时上限角速度ωlim最低,并且上限角速度ωlim与端部间隔角δθ的增大成比例地增大。此外,当端部间隔角δθ大于预定角θ2时,上限角速度ωlim被设置为保持在预先设置为电机21能够旋转的最大角速度的值。预定角θ2被设置为大于上述预定角θ1的角。
58.当转向速率ωs的绝对值比与端部间隔角δθ对应的上限角速度ωlim高时,超过量角速度计算单元83将转向速率ωs相对于上限角速度ωlim的超过量作为超过量角速度ωo输出至速度限制分量计算单元84。另一方面,当转向速率ωs的绝对值等于或低于上限角速度ωlim时,超过量角速度计算单元83将指示零的超过量角速度ωo输出至速度限制分量计算单元84。
59.具体而言,超过量角速度计算单元83包括接收上限角速度ωlim和转向速率ωs的
最小值选择单元87。最小值选择单元87选择上限角速度ωlim和转向速率ωs的绝对值中较小的一者,并且将该较小的一者输出至减法器88。然后,超过量角速度计算单元83利用减法器88通过从转向速率ωs的绝对值中减去最小值选择单元83的输出值来计算超过量角速度ωo。在通过最小值选择单元87选择上限角速度ωlim和转向速率ωs中的较小者时转向速率ωs的绝对值等于或小于上限角速度ωlim的情况下,通过减法器88从转向速率ωs中减去转向速率ωs使得超过量角速度ωo变为零。另一方面,在转向速率ωs的绝对值比上限角速度ωlim大的情况下,通过减法器88从转向速率ωs的绝对值减去上限角速度ωlim,使得转向速率ωs相对于上限角速度ωlim的超过量成为超过量角速度ωo。
60.速度限制分量计算单元84接收超过量角速度ωo和车速spd。速度限制分量计算单元84包括决定超过量角速度ωo、车速spd和速度限制分量igs的关系的映射,并且通过参照该映射来计算与超过量角速度ωo和车速spd对应的速度限制分量igs。
61.在该映射中,速度限制分量igs被设置为使得当超过量角速度ωo为零时速度限制分量igs最小,并且速度限制分量igs与超过量角速度ωo的增加成比例地增加。此外,在该映射中,速度限制分量igs被设置为基于车速spd的增加而减小。在该映射中,速度限制分量igs的绝对值被设置为小于角限制分量iga的绝对值。以这种方式计算的速度限制分量igs被输出至减法器89。
62.额定电流ir被输入至接收角限制分量iga的减法器85。转向角限制值计算单元71将利用减法器85从额定电流ir减去角限制分量iga而得到的值输出至接收速度限制分量igs的减法器89。然后,转向角限制值计算单元71将利用减法器89从减法器85的输出值中减去速度极限分量igs而得到的值——即从额定电流ir中减去角限制分量iga以及速度限制分量igs而得到的值——作为转向角限制值ien输出至最小值选择单元73。转向角限制值ien还被输出至电机控制信号生成单元52。
63.接下来,将描述电机控制信号生成单元52。如图4所示,电机控制信号生成单元52通过基于电流命令值id
*
、iq
*
在d/q坐标系中执行电流反馈计算来计算电机控制信号sm。在下文中,词语“反馈”也写为“f/b”。
64.更具体地,电机控制信号生成单元52包括计算d轴实际电流值id和q轴实际电流值iq的三相至二相转换单元91。另外,电机控制信号生成单元52包括通过执行电流f/b计算来计算d轴电压命令值vd
*
的d轴电流f/b控制单元92和通过执行电流f/b计算来计算q轴电压命令值vq
*
的q轴电流f/b控制单元93。另外,电机控制信号生成单元52包括对三相中的电压命令值vu
*
、vv
*
、vw
*
进行计算的二相至三相转换单元94以及生成电机控制信号sm的pwm转换单元95。
65.三相至二相转换单元91接收各个相中的电流值iu、iv、iw和旋转角θm。三相至二相转换单元91通过基于旋转角θm将各个相的电流值iu、iv、iw映射到d/q坐标系上来计算d轴实际电流值id和q轴实际电流值iq。d轴实际电流值id连同d轴电流命令值id
*
一起输入至减法器97,q轴实际电流值iq连同q轴电流命令值iq
*
一起输入至减法器98。减法器97通过从d轴电流命令值id
*
中减去d轴实际电流值id来计算d轴电流偏差δid,并将d轴电流偏差δid输出至d轴电流f/b控制单元92。减法器98从q轴电流命令值iq
*
中减去q轴实际电流值iq来计算q轴电流偏差δiq,并将q轴电流偏差δiq输出至q轴电流f/b控制单元93。
66.d轴电流f/b控制单元92基于d轴电流偏差δid执行使d轴实际电流值id跟随d轴电
流命令值id
*
的电流f/b计算,并且计算d轴电压命令值vd
*
。具体而言,d轴电流f/b控制单元92通过将由d轴电流偏差δid乘以比例增益kdp而获得的比例分量和由d轴电流偏差δid的积分值乘以积分增益kdi而获得的积分分量相加来计算d轴电压命令值vd
*
。
67.q轴电流f/b控制单元93除了接收q轴电流偏差δiq以外,还接收q轴电流命令值iq
*
、转向角限制值ien、以及通过对旋转角θm进行微分而获得的电机角速度ωm。q轴电流f/b控制单元93基于这些状态量来执行q轴实际电流值iq跟随q轴电流命令值iq
*
的电流f/b计算,并且计算q轴电压命令值vq
*
。具体而言,q轴电流f/b控制单元93通过将由q轴电流偏差δiq乘以比例增益kqp而获得的比例分量与由q轴电流偏差δiq的积分值乘以积分增益kqi而获得的积分分量相加来计算q轴电压命令值vq
*
。如稍后所描述,比例增益kqp和积分增益kqi取决于输入的状态量而改变。以这种方式计算出的d轴电压命令值vd
*
和q轴电压命令值vq
*
被输出至二相至三相转换单元94。
68.二相至三相转换单元94除了接收d轴电压命令值vd
*
和q轴电压命令值vq
*
之外,还接收旋转角θm。二相至三相转换单元94通过基于旋转角θm将d轴电压命令值vd
*
和q轴电压命令值vq
*
映射在三相交流坐标上来计算三相中的电压命令值vu
*
、vv
*
和vw
*
。以这种方式计算出的电压命令值vu
*
、vv
*
和vw
*
被输出至pwm转换单元95。
69.pwm转换单元95基于电压命令值vu
*
、vv
*
和vw
*
计算占空比命令值,并且通过占空比命令值与作为载波例如三角波、锯齿波等的pwm载波之间的比较来生成具有由占空比命令值指示的占空比的电机控制信号sm。
70.接下来,将描述通过q轴电流f/b控制单元93进行的比例增益kqp和积分增益kqi的调整。当在执行端部抵靠缓和控制期间发生q轴实际电流值iq的过冲时,本实施方式中的q轴电流f/b控制单元93调整比例增益kqp和积分增益kqi作为要在电流f/b计算中使用的控制增益,使得比例增益kqp和积分增益kqi增大。比例增益kqp和积分增益kqi预先基于实验结果等设置为最佳值。作为比例增益kqp和积分增益kqi的调整,例如,采用执行与预设的常数相乘的方法或者执行与预定值相加的方法。
71.更具体而言,当在执行将q轴电流命令值iq
*
的绝对值限制为转向角限制值ien的端部抵靠缓和控制期间由下面描述的(a)至(c)构成的调整开始条件被满足时,q轴电流f/b控制单元93调整比例增益kqp和积分增益kqi使得比例增益kqp和积分增益kqi增大。当输入的q轴电流命令值iq
*
的绝对值与转向角限制值ien相等时,q轴电流f/b控制单元93确定q轴电流命令值iq
*
的绝对值被限制为转向角限制值ien并且执行端部抵靠缓和控制。
72.(a)q轴电流偏差δiq的绝对值等于或大于预设的第一电流偏差阈值δith1。
73.(b)电机角速度ωm的绝对值等于或大于预设的角速度阈值ωth。
74.(c)作为电机角速度ωm的变化量的角速度变化量δω的绝对值等于或大于预设的角速度变化量阈值δωth。第一电流偏差阈值δith1是指示例如会引起转向感觉变差的电流偏差的值,并且是预先设置的。角速度阈值ωth是指示例如发生端部抵靠时的相对较高的角速度的值,并且是预先设置的。角速度变化量阈值δωth是指示例如由于端部抵靠缓和控制的执行而引起的电机角速度ωm的减小的角速度变化量,并且是预先设置的。作为本实施方式中的角速度变化量δω,使用通过q轴电流f/b控制单元93在上一计算周期中获取的电机角速度ωm与通过q轴电流f/b控制单元93在倒数第二个计算周期中获取的电机角速度ωm之间的差。
75.当比例增益kqp和积分增益kqi的调整之后由下面描述的(d)和(e)构成的取消条件被满足时,q轴电流f/b控制单元93取消比例增益kqp和积分增益kqi的调整,并且设置为原来的值。
76.(d)q轴电流偏差δiq的绝对值等于或小于预设的第二电流偏差阈值δith2,该第二电流偏差阈值δith2小于第一电流偏差阈值δith1。
77.(e)比例增益kqp和积分增益kqi已经被调整以进行增大的状态持续达预定时间。
78.第二电流偏差阈值δith2是例如指示不可能引起转向感觉变差的电流偏差的值,并且是预先设置的。预定时间是在执行端部抵靠缓和控制期间很可能发生q轴实际电流值的过冲的时间,并且是预先设置的。
79.具体而言,如图5的流程图所示,q轴电流f/b控制单元93获取各种状态量(步骤101),并且然后确定是否设置了指示比例增益kqp和积分增益kqi已经被调整以进行增大的标记(步骤102)。在未设置标记的情况下(步骤102:否),q轴电流f/b控制单元93确定是否正在通过将q轴电流命令值iq
*
限制为转向角限制值ien来执行端部抵靠缓和控制(步骤103)。
80.接着,在q轴电流命令值iq
*
的绝对值被限制为转向角限制值ien的情况下(步骤103:是),q轴电流f/b控制单元93确定q轴电流偏差δiq的绝对值是否等于或大于第一电流偏差阈值δith1(步骤104)。在q轴电流偏差δiq的绝对值等于或大于第一电流偏差阈值δith1(步骤104:是)的情况下,q轴电流f/b控制单元93确定电机角速度ωm的绝对值是否等于或大于角速度阈值ωth(步骤105)。在电机角速度ωm的绝对值等于或大于角速度阈值ωth的情况下(步骤105:是),q轴电流f/b控制单元93确定角速度变化量δω的绝对值是否等于或大于角速度变化量阈值δωth(步骤106)。在角速度变化量δω的绝对值等于或大于角速度变化量阈值δωth的情况下(步骤106:是),q轴电流f/b控制单元93调整比例增益kqp和积分增益kqi使得比例增益kqp和积分增益kqi增大(步骤107),并且设置标记(步骤108)。
81.另一方面,在q轴电流命令值iq
*
的绝对值未被限制为转向角限制值ien的情况下(步骤103:否),即,在未执行端部抵靠缓和控制的情况下,在限制值ig被设置为比转向角限制值ien低的电压限制值ivb的情况下,或者在其他情况下,q轴电流f/b控制单元93不执行之后的过程。此外,在q轴电流偏差δiq的绝对值小于第一电流偏差阈值δith1的情况下(步骤104:否),在电机角速度ωm的绝对值小于角速度阈值ωth的情况下(步骤105:否),或者在角速度变化量δω的绝对值小于角速度变化量阈值δωth的情况下(步骤106:否),q轴电流f/b控制单元93不执行此后的过程。
82.在设置了标记的情况下(步骤102:是),q轴电流f/b控制单元93增加计数值c(步骤109),该计数值c指示在调整比例增益kqp和积分增益kqi之后所经过的时间。随后,q轴电流f/b控制单元93确定计数值c是否等于或大于与预定时间相对应的预定计数值cth(步骤110)。在计数值c等于或大于预定计数值cth的情况下(步骤110:是),q轴电流f/b控制单元93确定q轴电流偏差δiq的绝对值是否小于第二电流偏差阈值δith2(步骤111)。在q轴电流偏差δiq的绝对值小于第二电流偏差阈值δith2的情况下(步骤111:是),q轴电流f/b控制单元93取消比例增益kqp和积分增益kqi的调整(步骤112),重置标记(步骤113),并且清除计数值c(步骤114)。
83.在计数值c小于预定计数值cth的情况下(步骤110:否),或者在q轴电流偏差δiq
的绝对值等于或大于第二电流偏差阈值δith2的情况下(步骤111:否),q轴电流f/b控制单元93不执行此后的过程。
84.接下来,将描述由于比例增益kqp和积分增益kqi的调整而引起的q轴实际电流值iq的变化。这里,参照图6,假设驾驶员以高速执行转向并且齿条端部18与齿条壳体13碰撞。如图6所示,在时间t1处端部间隔角δθ变为等于或小于预定角度θ1,并且然后作为与在此之前的转向扭矩th和车速spd相对应的值的q轴电流命令值iq
*
快速地降低为零。在这种场合下,如图6中虚线所示,在比例增益kqp和积分增益kqi未被调整的比较示例中,q轴实际电流值iq减小以被延迟到q轴电流命令值iq
*
之后。由此,比较示例的q轴实际电流值iq暂时过冲,并且q轴电流命令值iq
*
与q轴实际电流值iq的间隙变大。之后,虽然q轴实际电流值iq的过冲被降低,但在时间t2处发生端部抵靠时,反向电压快速下降,使得再次发生过冲。
85.具体地,在时间t2之后,以高速旋转的电机21突然停止,并且电机角速度ωm减小,使得在电机21中生成的反向电压快速减小。另一方面,如上所描述,q轴电流f/b控制单元93执行电流f/b计算,并且因此由q轴电流f/b控制单元93输出的q轴电压命令值vq
*
包括用于针对电机21中生成的反向电压供应电流的电压。但是,由于q轴电流命令值iq
*
的限制,反向电压的降低比q轴电压命令值vq
*
的降低早,并且因此电压暂时施加至电机21使得发生q轴实际电流值iq的过冲。
86.这里,假设在时间t1处q轴电流偏差δiq的绝对值等于或大于第一电流偏差阈值δith1以及电机角速度ωm的绝对值等于或大于角速度阈值ωth,并且假设电机角速度ωm通过q轴电流命令值iq
*
的限制而减小以及角速度变化量δω的绝对值等于或大于角速度变化量阈值δωth。作为结果,在本实施方式中,由于比例增益kqp和积分增益fqi被调整以进行增大,因此q轴实际电流值iq的响应性变高。
87.由此,如图6中的实线所示,抑制了由q轴实际电流值iq的响应性引起的过冲。另外,由于q轴电流f/b控制单元93持续其中比例增益kqp和积分增益kqi为大的状态达预定时间,所以避免了比例增益kqp和积分增益kqi的值的增或减,并且抑制了由反向电压的快速降低而引起的过冲。
88.在一些情况下,例如,q轴电流偏差δiq的绝对值在时间t1处小于第一电流偏差阈值δith1,并且比例增益kqp和积分增益kqi在该时间点处未被调整以进行增大。即使在这种情况下,在时间t2处以及以后,由于发生了因反向电压的快速降低而引起的过冲,因此q轴电流偏差δiq的绝对值变得等于或大于第一电流偏差阈值δith1,并且比例增益kqp和积分增益kqi被调整以进行增大。由此,抑制了由反向电压的快速降低引起的过冲。
89.接下来,将描述该实施方式的操作和效果。当在执行端部抵靠缓和控制期间出现q轴实际电流值iq的过冲时,q轴电流f/b控制单元93调整要在电流f/b计算中使用的比例增益kqp和积分增益kqi,使得比例增益kqp和积分增益kqi增大。由此,q轴实际电流值iq对q轴电流命令值iq
*
的响应性变高,并且因此能够抑制被供应至电机21的电流的过冲。
90.电流命令值计算单元51以将q轴电流命令值iq
*
的绝对值限制为转向角限制值ien的方式来执行端部抵靠缓和控制。因此,即使当电流命令值计算单元51最大限度地限制q轴电流命令值iq
*
时,q轴电流命令值iq
*
的绝对值至多仅为零。因此,通过调整比例增益kqp和积分增益kqi来抑制过冲的效果为高。
91.在包括q轴电流偏差δiq的绝对值等于或大于第一电流偏差阈值δith1的条件的
调整开始条件被满足的情况下,q轴电流f/b控制单元93确定发生q轴实际电流值iq的过冲,并且调整比例增益kqp和积分增益kqi使得比例增益kqp和积分增益kqi增大。通过以这种方式在q轴电流偏差δiq的绝对值与第一电流偏差阈值δith1之间执行大小比较,可以准确地确定过冲的发生。
92.除了q轴电流偏差δiq的绝对值等于或大于第一电流偏差阈值δith1的条件之外,调整开始条件还包括电机角速度ωm的绝对值等于或大于角速度阈值ωth的条件。因此,能够准确地感知由于端部抵靠的发生而引起的q轴实际电流值iq过冲的情况,并且能够提高控制增益,以及能够适当地抑制该过冲。
93.除了q轴电流偏差δiq的绝对值等于或大于第一电流偏差阈值δith1的条件之外,调整开始条件还包括角速度变化量δω的绝对值等于或大于角速度变化量阈值δωth的条件。因此,能够准确地感知由于端部抵靠的发生而引起的q轴实际电流值iq过冲的情况,并且能够提高控制增益,以及能够适当地抑制该过冲。
94.当比例增益kqp和积分增益kqi增大并且由此q轴实际电流值iq的响应性变高时,电机21对例如q轴电流命令值iq
*
的微小变化敏感地作出反应,使得会产生振动或异常噪声。在这一点上,在本实施方式中,当取消条件被满足时,q轴电流f/b控制单元93取消比例增益kqp和积分增益kqi的调整。因此,当由于q轴实际电流值iq的过冲的降低而不需要高响应性的情况下,能够抑制比例增益kqp和积分增益kqi保持为大,并且能够抑制产生振动或异常噪声。
95.取消条件包括q轴电流偏差δiq的绝对值等于或小于第二电流偏差阈值δith2的条件,并且因此可以抑制比例增益kqp和积分增益kqi的调整在q轴实际电流值iq的过冲大的状态下被取消。
96.q轴实际电流值iq的过冲不仅是由于电机21的突然停止使反向电压的快速降低而引起的,而且是由q轴实际电流值iq对由于执行端部抵靠缓和控制所引起的q轴电流命令值iq
*
的快速降低的响应的延迟而引起的。当由于q轴实际电流值iq的响应性引起的过冲而使上述(a)至(c)构成的调整开始条件被满足时,比例增益kqp和积分增益kqi被调整以进行增大,并且由此可以抑制过冲。
97.在一些情况下,在由如上所描述的q轴实际电流值iq的响应性引起的过冲发生之后,q轴电流偏差δiq的绝对值减小一次,并且然后由于通过反向电压的快速减小引起的过冲的发生,q轴电流偏差δiq的绝对值再次增大。因此,例如,如果仅基于q轴电流偏差δiq的绝对值等于或小于第二电流偏差阈值δith2的条件来取消比例增益kqp和积分增益kqi的调整,则存在比例增益kqp和积分增益kqi的值重复增加和减少的担心。在这一点上,在本实施方式中,取消条件包括比例增益kqp和积分增益kqi被调整以进行增大的状态持续达预定时间的条件。因此,比例增益kqp和积分增益kqi为大的状态持续达预定时间。因此,可以防止比例增益kqp和积分增益kqi被频繁切换,并且可以抑制转向感觉变差。
98.该实施方式可以在被如下修改的同时被实施。只要不存在技术上的矛盾,可以在相互组合的同时执行实施方式和以下改型。
99.在上述实施方式中,当由上述(d)和(e)构成的取消条件被满足时,取消比例增益kqp和积分增益kqi的调整。但是,不限于此,在仅条件(d)或仅条件(e)被满足时,也可以取消比例增益kqp和积分增益kqi的调整,并且取消条件也可以包括另外的条件。
100.在上述实施方式中,在执行端部抵靠缓和控制期间当由上述(a)至(c)构成的调整开始条件被满足时,比例增益kqp和积分增益kqi被调整。但是,不限于此,当条件(a)被满足时,即使当条件(b)和条件(c)中的至少一个不被满足时,也可以调整比例增益kqp和积分增益kqi。此外,调整开始条件可以包括另外的条件。另外,也可以例如确定q轴实际电流值iq是否快速上升以及q轴电压命令值vq
*
是否快速下降,来替代条件(a)。
101.在上述实施方式中,类似于q轴电流f/b控制单元93,当发生d轴实际电流值id的过冲时,d轴电流f/b控制单元92可以调整比例增益kdp和积分增益kdi。
102.在上述实施方式中,可以在适当的时候修改由q轴电流f/b控制单元93执行的电流f/b计算的方式。q轴电流f/b控制单元93可以例如执行pid控制计算。类似地,d轴电流f/b控制单元92可以例如执行pid控制计算。
103.在上述实施方式中,通过即使在点火开关处于关断状态时也监测电机21是否旋转,转向控制装置1将电机21从起始点开始的所有时间的转数相加,并且计算电机绝对角。但是,不限于此,例如,转向控制装置1可以设置有检测作为绝对角的转向角的转向传感器。转向控制装置1可以基于由转向传感器检测到的转向角和减速器22的减速比,将从起始点开始的电机21的转数加起来,并且可以计算电机绝对角。
104.在上述实施方式中,转向控制装置1通过将辅助命令值ias
*
限制为转向角限制值ien来执行端部抵靠缓和控制。但是,不限于此,例如转向控制装置1也可以通过向辅助命令值ias
*
加上随着齿条轴12接近齿条端部位置而增大的转向反作用分量——即符号与辅助命令值ias
*
的符号相反的分量——来执行端部抵靠缓和控制。
105.在上述实施方式中,转向控制装置1对辅助命令值ias
*
执行保护处理。但是,不限于此,例如转向控制装置1也可以针对通过以基于对转向扭矩th进行微分而得到的扭矩微分值的补偿量对辅助命令值ias
*
进行校正而得到的值执行保护处理。
106.在上述实施方式中,限制值设置单元62包括基于电源电压vb计算电压限制值ivb的电压限制值计算单元72。但是,不限于此,除了电压限制值计算单元72之外或者代替该电压限制值计算单元72,限制值设置单元62还可以包括基于另一状态量计算另一限制值的另一计算单元。此外,限制值设置单元62可以配置成在不包括电压限制值计算单元72的情况下将转向角限制值ien自身设定为限制值ig。
107.在上述实施方式中,转向角限制值ien可以是从额定电流ir中仅减去角限制分量iga而得到的值。
108.在上述实施方式中,转向控制装置1控制eps 2,eps 2是eps致动器6向柱轴15给予电机扭矩的类型的转向装置。但是,不限于此,例如,转向控制装置1可以控制通过滚珠丝杠螺母向齿条轴12给予电机扭矩的类型的转向装置。此外,不限于eps,转向控制装置1也可以控制在驾驶员操作的转向单元与使转弯轮转弯的转弯单元之间不传递动力的线控转向式转向装置,并且可以针对设置在转弯单元中的转弯致动器的电机的扭矩命令值或q轴电流命令值来执行本实施方式的端部抵靠缓和控制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1