一种自动驾驶机器人转向执行机构的制作方法
1.本发明涉及自动驾驶机器人领域,具体地说是一种自动驾驶机器人转向执行机构。
背景技术:
2.随着汽车工业新技术的发展趋势,人们对汽车的安全性和可靠性提出了越来越高的要求,这就需要企业要对汽车做大量的稳定性、安全性和可靠耐久性的试验来不断提高水平。
3.汽车试验要求的不断提高,有些环境人类无法完成,或者对人类驾驶员来说有一定的危险性。此时汽车试验就可以通过自动驾驶机器人来完成。相比试驾员,自动驾驶机器人具有能高精度地控制、重复性好、疲劳耐久性强等优点。特别是道路试验驾驶机器人,通过环境感知和识别系统大大提高了自动化程度,可代替驾驶员完成一些疲劳性和危险性驾驶试验,为驾驶员的安全和实验结果的可靠性提供保证。
4.目前现有的汽车转向机器人产品在使用时,需将原测试车辆的方向盘拆解下来,再将该机器人安装在车辆方向盘转轴上,实际已将原车机构进行拆改,使用该机器人无法进行方向盘耐久测试,能够进行的测试项目较少;且由于拆解的过程存在,导致机器人整体安装时间较长,不利于整车厂批量测试使用;由于拆除了原车方向盘,导致紧急情况下安全气囊缺失,易使测试人员发生安全事故。
技术实现要素:
5.针对上述问题,本发明的目的在于提供一种自动驾驶机器人转向执行机构。
6.本发明的目的是通过以下技术方案来实现的:
7.一种自动驾驶机器人转向执行机构,包括方向盘连接环、安装板、驱动电机、导向轮a、导向轮b、卡爪组件、支撑杆、拉压力传感器及导轨连接件;
8.所述方向盘连接环包括固定在一起的导轨环部与内齿圈部,所述导轨环部上设有用于夹住方向盘的所述卡爪组件;
9.所述导轨连接件用于与自动驾驶机器人座椅滑轨固定机构的导轨连接,所述拉压力传感器一端与所述导轨连接件连接,所述拉压力传感器另一端与所述支撑杆的一端连接,所述支撑杆的另一端与所述安装板连接;
10.所述驱动电机、所述导向轮a、所述导向轮b分别安装于所述安装板上,所述导向轮a对所述导轨环部的内周面轴向限位,所述导向轮b对所述导轨环部的外周面轴向限位,所述驱动电机的输出轴上设有驱动齿轮,所述驱动齿轮与所述内齿圈部内周面上的轮齿相啮合;
11.所述驱动电机通过所述驱动齿轮与所述内齿圈部带动所述方向盘连接环整体转动,进而带动所述卡爪组件夹住的汽车方向盘转向。
12.所述导轨环部的轴向中心线与所述内齿圈部的轴向中心线共线。
13.所述导轨连接件包括导轨连接件主体、螺杆a与调节夹块,所述螺杆a分别与所述导轨连接件主体和所述调节夹块螺纹连接,所述导轨连接件主体上还设有导向柱,所述导向柱的轴向中心线与所述螺杆a的轴向中心线相平行,且所述导向柱穿过所述调节夹块;旋动所述螺杆a可带动所述调节夹块沿所述导向柱轴向改变位置,使所述导轨连接件主体和所述调节夹块共同将自动驾驶机器人座椅滑轨固定机构的导轨夹紧或松开。
14.本发明的自动驾驶机器人转向执行机构还包括挂钩与挂钩位置调节槽板,所述挂钩勾住汽车方向盘轮辐处,所述挂钩位置调节槽板安装在所述导轨环部上,所述挂钩位置调节孔板上设有调节槽,所述挂钩的末端卡入所述调节槽中;通过改变所述挂钩末端在所述调节槽中的卡接位置以适应不同形状的方向盘。
15.所述导轨环部上设有把手。
16.所述卡爪组件包括卡爪滑动座、卡爪主体与螺杆b,所述卡爪滑动座固定在所述导轨环部上,所述卡爪滑动座上设有与所述卡爪主体相配合的滑槽,所述卡爪主体在所述卡爪滑动座的滑槽中沿所述导轨环部的径向移动,所述螺杆b依次与所述卡爪主体和所述卡爪滑动座螺纹连接,且所述螺杆b的轴向中心线与所述导轨环部的径向平行;通过旋动所述螺杆b调整所述卡爪主体在所述卡爪滑动座的滑槽中的位置。
17.所述卡爪滑动座上设有距离标尺,所述距离标尺用于表示所述卡爪主体的位置。
18.所述导向轮a的外周面上与所述导向轮b的外周面上分别设有v形凹槽,所述导轨环部的内周面形状与所述导向轮a上的v形凹槽相契合,所述导轨环部的外周面形状与所述导向轮b上的v形凹槽相契合。
19.本发明的优点与积极效果为:
20.本发明在使用时不需对车辆原有部件机构进行拆解,能够做到快速安装、拆卸,同时保证汽车安全气囊的正常使用;配置的拉压力传感器,能够实施监控机构对方向盘输出的转矩。
附图说明
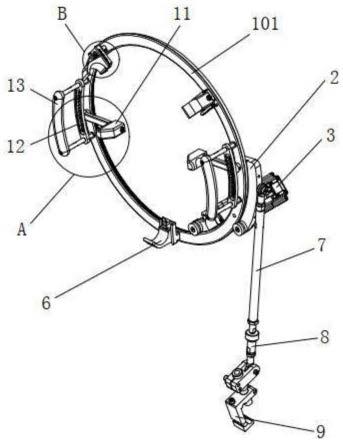
21.图1为本发明的整体结构立体示意图;
22.图2为本发明的整体结构主视示意图;
23.图3为本发明的整体结构后视示意图;
24.图4为本发明的方向盘连接环与卡爪组件的设置结构示意图;
25.图5为本发明的导向轮a与导向轮b的设置结构示意图;
26.图6为图1的a处放大图;
27.图7为图1的b处放大图;
28.图8为图2的c处放大图;
29.图9为自动驾驶机器人座椅滑轨固定机构的结构示意图。
30.图中:1-方向盘连接环、101-导轨环部、102-内齿圈部、2-安装板、3-驱动电机、4-导向轮a、5-导向轮b、6-卡爪组件、601-卡爪滑动座、602-卡爪主体、603-螺杆b、7-支撑杆、8-拉压力传感器、9-导轨连接件、901-导轨连接件主体、902-螺杆a、903-调节夹块、904-导向柱、10-驱动齿轮、11-挂钩、12-挂钩位置调节槽板、1201-调节槽、13-把手、001-自动驾驶机器人座椅滑轨固定机构、0011-螺杆安装座、0012-螺杆、0013-移动块、0014-支撑座、
0015-支撑块、0016-导轨、0017-连接杆。
具体实施方式
31.下面结合附图1-9对本发明作进一步详述。
32.一种自动驾驶机器人转向执行机构,如图1-3所示,包括方向盘连接环1、安装板2、驱动电机3、导向轮a 4、导向轮b 5、卡爪组件6、支撑杆7、拉压力传感器8及导轨连接件9;
33.方向盘连接环1包括固定在一起的导轨环部101与内齿圈部102,导轨环部101上设有用于夹住方向盘的卡爪组件6,本实施例中导轨环部101的轴向中心线与内齿圈部102的轴向中心线共线;
34.导轨连接件9用于与自动驾驶机器人座椅滑轨固定机构001的导轨0016连接,拉压力传感器8一端与导轨连接件9连接,拉压力传感器8另一端与支撑杆7的一端连接,支撑杆7的另一端与安装板2连接;拉压力传感器8的设置,用于测量在汽车方向盘转动时支撑杆7受到的拉压力,进而可推算汽车方向盘受到的转矩大小,本实施例中拉压力传感器8为市购产品,拉压力传感器8与外接控制器连接并将数据传给外接控制器,拉压力传感器8的连接设置方式均为现有技术;
35.驱动电机3、导向轮a 4、导向轮b 5分别安装于安装板2上,如图4和图5所示,导向轮a 4对导轨环部101的内周面轴向限位,导向轮b 5对导轨环部101的外周面轴向限位,本实施例中导向轮a 4的外周面上与导向轮b 5的外周面上分别设有v形凹槽,导轨环部101的内周面形状与导向轮a 4上的v形凹槽相契合,导轨环部101的外周面形状与导向轮b 5上的v形凹槽相契合;驱动电机3的输出轴上设有驱动齿轮10,驱动齿轮10与内齿圈部102内周面上的轮齿相啮合,本实施例中驱动电机3为市购的伺服电机产品,驱动电机3由外接控制器控制动作,驱动电机3的连接设置方式均为现有技术,本实施例采用伺服电机驱动,自动驾驶机器人转向执行机构可以进行各种复杂场景测试,如“鱼钩”测试、“j-turn”测试、阶跃响应测试、正弦迟滞测试、adas测试以及车辆耐久性测试等等;
36.驱动电机3通过驱动齿轮10与内齿圈部102带动方向盘连接环1整体转动,进而带动卡爪组件6夹住的汽车方向盘转向,实现控制汽车方向盘进行转向的技术效果。
37.具体而言,如图8所示,本实施例中的导轨连接件9包括导轨连接件主体901、螺杆a 902与调节夹块903,螺杆a 902分别与导轨连接件主体901和调节夹块903螺纹连接,导轨连接件主体091上还设有导向柱904,导向柱904的轴向中心线与螺杆a 902的轴向中心线相平行,且导向柱904穿过调节夹块903;旋动螺杆a 902可带动调节夹块903沿导向柱904轴向改变位置,使导轨连接件主体901和调节夹块903共同将自动驾驶机器人座椅滑轨固定机构001的导轨0016夹紧或松开,拆装方便,可快速与导轨0016连接。
38.本实施例中的自动驾驶机器人座椅滑轨固定机构001,如图9所示,包括螺杆安装座0011、螺杆0012、移动块0013、支撑座0014、导轨0016及连接杆0017;螺杆0012转动设置在螺杆安装座0011上,移动块0013与螺杆0012螺纹连接,移动块0013在螺杆0012上能够自锁,移动块0013在螺杆0012带动下移动;支撑座0014分别设置在移动块0013的左右两侧,移动块0013与支撑座0014之间通过连接杆0017连接,连接杆0017的两端分别与连接的移动块0013与支撑座0014铰接;每侧支撑座0014一端的一侧用于与连接杆0017铰接,该端的另一侧安装有支撑块0015,导轨0016安装于支撑座0014的另一端;导轨0016安装于支撑座0014
上,本实施例中导轨0016采用高强度铝合金材料制成;旋动螺杆安装座0011上的螺杆0012,移动块0013在螺杆0012带动下移动,并通过连接杆0017使支撑座0014左右伸出或收回,支撑座0014上安装的支撑块0015在连接杆0017伸出时顶紧汽车座椅滑轨的侧面,使自动驾驶机器人座椅滑轨固定机构001整体与汽车座椅滑轨紧紧贴合,可根据不同座椅滑轨更换合适的形状的支撑块0015;支撑座0014上的导轨0016用于安装制动、油门、离合、转向等其他机构。
39.具体而言,如图6所示,本实施例中的自动驾驶机器人转向执行机构还包括挂钩11与挂钩位置调节槽板12,挂钩11勾住汽车方向盘轮辐处,挂钩位置调节槽板12安装在导轨环部101上,挂钩位置调节孔板12上设有调节槽1201,挂钩11的末端卡入调节槽1201中;通过改变挂钩11末端在调节槽1201中的卡接位置以适应不同形状的方向盘;通过挂钩11勾住汽车方向盘轮辐处以模拟人手抓汽车方向盘,使测试效果更加接近真实状况,设有调节槽1201的挂钩位置调节槽板12与挂钩11的配合设置,便于挂钩11适应不同形状的方向盘;挂钩11与卡爪组件6的配合设置,更起到保证导轨环部101与汽车方向盘回转中心同轴的作用。
40.具体而言,本实施例中的导轨环部101上设有把手13,用于人抓持移动自动驾驶机器人转向执行机构整体,且便于人手抓握把手13直接人工驾驶汽车。
41.具体而言,如图4和图7所示,卡爪组件6包括卡爪滑动座601、卡爪主体602与螺杆b 603,卡爪滑动座601固定在导轨环部101上,卡爪滑动座601上设有与卡爪主体602相配合的滑槽,卡爪主体602在卡爪滑动座601的滑槽中沿导轨环部101的径向移动,螺杆b 603依次与卡爪主体602和卡爪滑动座601螺纹连接(图4为螺杆b 603从卡爪滑动座601分离的状态),且螺杆b 603的轴向中心线与导轨环部101的径向平行,卡爪滑动座601上设有距离标尺,距离标尺用于表示卡爪主体602的位置;通过旋动螺杆b 603调整所述卡爪主体602在卡爪滑动座601的滑槽中的位置,可方便地根据不同大小的方向盘,调节卡爪主体602在卡爪滑动座601的滑槽中的位置进行适应并夹住方向盘,距离标尺的设置便于测试人员调节卡爪主体602的位置。
42.工作原理:
43.使用时,将导轨环部101上的卡爪组件6夹住汽车方向盘,使挂钩11勾住汽车方向盘轮辐处以模拟人手抓汽车方向盘,使导轨环部101、内齿圈部102与汽车方向盘回转中心同轴,将导轨连接件9与自动驾驶机器人座椅滑轨固定机构001的导轨0016固定;使安装板2上的驱动电机3通过驱动齿轮10与内齿圈部102带动方向盘连接环1整体转动,进而带动卡爪组件6夹住的汽车方向盘转向,实现控制汽车方向盘进行转向的技术效果;导向轮a 4对导轨环部101的内周面轴向限位,导向轮b 5对导轨环部101的外周面轴向限位;拉压力传感器8测量在汽车方向盘转动时支撑杆7受到的拉压力,进而可推算汽车方向盘受到的转矩大小,并将数据传给外接控制器。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1