中心内啮合轴摆臂轮组的制作方法
1.本发明涉及一种移动机器人平台,特别是一种中心内啮合轴摆臂轮组。
背景技术:
2.传统应用于室外移动机器人平台的通常为轮式结构、履带式结构或者足式结构。
3.轮式结构通常为双轮差速或四轮差速结构,其具有较高的运动效率,通过悬挂能具备一定复杂地形的适应性,但是其适应能力有限。
4.履带式结构能够实现较好的复杂地形的适应能力,但是履带易出现脱落,且履带系统的维护较为复杂。
5.足式结构理论能够适应十分复杂的地形,但是其存在极大的不稳定性,易出现侧翻、摔倒等,且复杂地形移动速度较慢。
技术实现要素:
6.本发明要解决的技术问题是,提供一种中心内啮合轴摆臂轮组,其不仅具有复杂地形的适应能力以及较高的运动效率,而且能够在作业时,防止平台侧翻、倾覆等状况的发生,稳定性强。
7.本发明的技术解决方案是,提供一种具有以下结构的中心内啮合轴摆臂轮组,包括驱动装置、链传动机构、行星摆臂机构和车轮组件;所述行星摆臂机构包括摆臂支架、传动轴、左齿轮和右齿轮,所述摆臂支架位于链传动机构的下部,且前后方向设置,所述摆臂支架的中部和链传动机构的下部开设有贯穿的横向安装孔,所述传动轴左右方向设置,插设在横向安装孔内,所述左齿轮安装在传动轴的左端,所述右齿轮安装在传动轴的右端,所述摆臂支架可围绕传动轴转动,所述摆臂支架上设有用于对摆臂支架的转动角度进行限位的限位装置;所述车轮组件包括左车轮和右车轮,所述左车轮装在摆臂支架的前部,所述右车轮装在摆臂支架的后部,所述左车轮的内腔中装有左内齿圈,所述右车轮的内腔中装有右内齿圈,所述左齿轮位于左车轮的内腔中,并与左内齿圈啮合,所述右齿轮位于右车轮的内腔中,并与右内齿圈啮合;所述驱动装置装在链传动机构的上部,用于驱动左齿轮和右齿轮旋转,进而驱使左车轮和右车轮行走,所述链传动机构用于安装在平台主体框架上。
8.本发明所述的中心内啮合轴摆臂轮组,其中,所述链传动机构包括链轮箱、链轮ⅰ、链轮ⅱ、链轮ⅲ和链条,所述链轮ⅰ装在驱动装置的输出轴上,所述链轮ⅱ装在链轮箱上,所述链轮ⅲ装在传动轴上,所述链条同时与链轮ⅰ、链轮ⅱ和链轮ⅲ连接。
9.本发明所述的中心内啮合轴摆臂轮组,其中,所述驱动装置包括驱动电机和减速器,所述驱动电机装在减速器上,所述减速器装在链传动机构上,减速器的输出轴与链轮ⅰ连接。
10.本发明所述的中心内啮合轴摆臂轮组,其中,所述限位装置由沿摆臂支架前后方向开设的行程孔和位于行程孔前后两端的挡肩组成,所述链轮箱下部位于行程孔内,链轮箱的侧壁与挡肩相配合,用于对摆臂支架的转动角度进行限位。
11.采用以上结构后,与现有技术相比,本发明中心内啮合轴摆臂轮组具有以下优点:本发明包括驱动装置、链传动机构、行星摆臂机构和车轮组件,且行星摆臂机构包括摆臂支架、传动轴、左齿轮和右齿轮,摆臂支架位于链传动机构的下部,前后方向设置,摆臂支架的中部和链传动机构的下部开设有贯穿的横向安装孔,传动轴左右方向设置,插设在横向安装孔内,左、右齿轮分别安装在传动轴的左右两端,摆臂支架可围绕传动轴转动,摆臂支架上设有用于对摆臂支架的转动角度进行限位的限位装置;车轮组件包括左、右车轮,左车轮装在摆臂支架的前部,右车轮装在摆臂支架的后部,左车轮的内腔中装有左内齿圈,右车轮的内腔中装有右内齿圈,左、右齿轮分别与左、右内齿圈啮合,因此,在实际应用时,可将四组本发明分别安装到平台主体框架上的四个边角处,从而不仅使得平台具备轮式移动平台的高移动性能特征,而且在行走时,传动机构通过左、右齿轮将动力传递给左、右车轮,这种内啮合的传动方式力矩较大,使分布在摆臂支架两侧的左、右车轮受力更加均匀,并且在平台自重的作用下能够被动适应复杂的地形,调整轮组姿态,形成多点接触。与此同时,限位装置能够实时对摆臂支架的转动角度进行限位,防止平台侧翻、倾覆等状况的发生,充分增强了平台作业时的稳定性。
附图说明
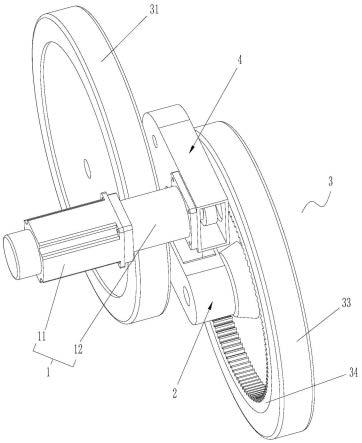
12.图1是本发明中心内啮合轴摆臂轮组的立体结构示意图;
13.图2是图1的俯视结构示意图;
14.图3是图1的立体分解结构示意图;
15.图4是图2中沿“a-a”线的剖视结构示意图。
具体实施方式
16.下面结合附图和具体实施方式对本发明中心内啮合轴摆臂轮组作进一步详细说明:
17.本发明针对室外移动机器人平台在移动性能、越障性能以及稳定性等技术上存在的不足,提出一种中心内啮合轴摆臂轮组结构,如图1和图2所示,该中心内啮合轴摆臂轮组包括驱动装置1、链传动机构4、行星摆臂机构2和车轮组件3。
18.结合图3,行星摆臂机构2包括摆臂支架21、传动轴23、左齿轮22和右齿轮24。摆臂支架21位于链传动机构4的下部,且前后方向设置;摆臂支架21的中部和链传动机构4的下部开设有贯穿的横向安装孔;传动轴23左右方向设置,通过轴承插设在横向安装孔内;左齿轮22通过平键安装在传动轴23的左端,右齿轮24通过平键安装在传动轴23的右端;摆臂支架21可围绕传动轴23转动,摆臂支架21上设有用于对摆臂支架21的转动角度进行限位的限位装置25。
19.车轮组件3包括左车轮31和右车轮33。左车轮31装在摆臂支架21的前部,右车轮33装在摆臂支架21的后部,加之摆臂支架21可围绕传动轴23转动的结构,使得左、右车轮在围绕自身轴线旋转运动的同时,还具有围绕传动轴23公转的自由度,故而整体结构具有根据地形调整姿态的能力。
20.左车轮31的内腔中固定安装有左内齿圈32,右车轮33的内腔中固定安装有右内齿圈34;左齿轮22位于左车轮31的内腔中,并与左内齿圈32啮合;右齿轮24位于右车轮33的内
腔中,并与右内齿圈34啮合。
21.驱动装置1作为整体动力输入,安装在链传动机构4的上部,用于驱动左齿轮22和右齿轮24旋转,进而驱使左车轮31和右车轮33行走,链传动机构4用于安装在平台主体框架上。
22.结合图4,链传动机构4包括链轮箱44以及位于链轮箱44内的链轮ⅰ41、链轮ⅱ42、链轮ⅲ43和链条45。链轮箱44为l形结构,链轮ⅰ41装在驱动装置1的输出轴上,链轮ⅱ42装在链轮箱44的外部拐角处,链轮ⅲ43通过平键安装在传动轴23上,链条45同时与链轮ⅰ41、链轮ⅱ42和链轮ⅲ43连接,形成链传动;链轮箱44的内部拐角处装有背轮46,压设有链条45的外部,将链条45给涨紧。
23.驱动装置1具体包括驱动电机11和减速器12,驱动电机11装在减速器12上,减速器12装在链轮箱44上,减速器12的输出轴通过平键与链轮ⅰ41连接。
24.结合图3,限位装置25由沿摆臂支架21前后方向开设的行程孔251和位于行程孔251前后两端的挡肩252组成。链轮箱44下部位于行程孔251内,链轮箱44的前后侧壁与挡肩252相配合,用于对摆臂支架21的转动角度进行限位,这种限位为机械限位,可以很好的防止平台侧翻、倾覆等危险情况的发生。
25.在实际应用时,将四组本发明分别安装到平台主体框架上的四个边角处,驱动电机通过链传动输入动力,由齿轮与内齿圈的啮合使车轮进行同步运动,进而实现驱动平台运动的功能,这种动力传递结构不仅使得平台具备轮式移动平台的高移动性能特征,而且在行走时,传动机构将动力传递给左、右车轮,加上平台的自重作用,每一个摆臂支架结构都能够配合两个车轮被动的适应复杂的地形,以调整轮组姿态,形成多点接触,最终实现对平台整体的姿态调整。与此同时,限位装置能够实时对摆臂支架的转动角度进行限位,防止平台侧翻、倾覆等状况的发生,充分增强了平台作业时的稳定性。
26.本发明中心内啮合轴摆臂轮组结构所具有的调整能力远大于普通悬挂车轮的调整能力,因而能够更好地适应复杂的地形,轮式结构相比原有的履带式或者足式结构具备较高的运动效率。通过齿轮传动,两个车轮均具备动力,适合在复杂地形下驱动平台。当平台部署多组本发明后,能够形成多点接触地形,具备较强的作业稳定性。
27.以上所述的实施例仅仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案作出的各种变形和改进,均应落入本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1