一种快递运输机器人在上坡时断电后自动制停的保护装置的制作方法
1.本发明涉及高新技术技术领域,具体为一种快递运输机器人在上坡时断电后自动制停的保护装置。
背景技术:
2.随着社会得到逐步发展,人们的生活水平得到了显著提高,从而使得人们对于现代科学的研究逐渐加强,通过一些新材料的研发,从而得到进一步的发发展,同时带替现有的材料,进而节约资源,同时高新技术还生产多种带替传统行业的设备。
3.但目前对于快递机器人运输任然存在需要克服的缺陷,快递机器人进行快递运输是现代的一个新的发展实验,快递机器人一般都是通过电力树输送作为能源,但电力输送的机器人在运输时喷到上坡,容易因坡度太抖,从而功率过,造成过载,使得快递机器人内部断电,从而容易引发快递机器人滑坡撞人的危险,同时在运输时,外部人员只能进行定位,不能及时发现异常,也容易造成交通堵塞,因此一种快递运输机器人在上坡时断电后自动制停的保护装置应运而生。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本发明提供了一种快递运输机器人在上坡时断电后自动制停的保护装置,具备当快递机器人在斜坡突遇断电危险时,自动对机器人进行紧急制动,同时当快递机器人运输时在斜坡发生断电时,自动工作人员进行信号提醒的优点,解决了电力输送的机器人在运输时喷到上坡,容易因坡度太抖,从而功率过,造成过载,使得快递机器人内部断电,从而容易引发快递机器人滑坡撞人的危险,同时在运输时,外部人员只能进行定位,不能及时发现异常,也容易造成交通堵塞的问题。
6.(二)技术方案
7.为解决上述技术问题,本发明提供如下技术方案:一种快递运输机器人在上坡时断电后自动制停的保护装置,包括触发机构和制动机构,所述制动机构内部包括移动杆,所述移动杆左端固定连接有连杆,所述连杆上端固定连接有复位弹簧,所述移动杆下端固定连接有聚能弹簧,所述聚能弹簧下端固定连接有挤压块,所述挤压块左端活动连接有抗阻弹簧,所述挤压块下端固定连接有摩擦板。
8.进一步的,所述触发机构内部包括导柱,所述导柱上端固定连接有导向板,所述导向板左端固定连接有拉伸弹簧,所述导向板左端固定连接有按压块,所述按压块右端活动连接有触发端口。
9.进一步的,还包括有传动机构,所述传动机构内部包括有滚轮,所述滚轮前端固定连接有卡接盘,所述卡接盘上端活动连接有受力杆,所述受力杆右端活动连接有限位块,所述受力杆上端活动连接有传递杆,所述传递杆上端活动连接有拉杆。
10.进一步的,所述卡接盘外表面固定连接有挂钩,挂钩朝向左端,所述受力杆下端固
定连接有挂钩,所述滚轮有两个,且关于壳体内部中心线左右对称。
11.进一步的,所述传递杆上端活动连接有连杆,所述连杆左端活动连接有拉杆,所述摩擦板位于滚轮右端,所述摩擦板位于壳体内壁下端。
12.进一步的,所述触发端口连接无线电源,与控制中心相连通,所述按压块位于壳体内壁左端。
13.三有益效果
14.与现有技术相比,本发明提供了一种快递运输机器人在上坡时断电后自动制停的保护装置,具备以下有益效果:
15.1、通过挤压块带动摩擦板向下移动,进而使得摩擦板伸出壳体下端,从而大面积与地面相接触,从而增大与地面的摩擦力,进而使得机器人停止运动,从而达到当快递机器人在斜坡突遇断电危险时,自动对机器人进行紧急制动的效果。
16.2、通过导向板向右移动时,带动按压块一起向右移动,从而从而与触发端口相接触,使得触发端口内部隐藏电源接通,从而对总部控制室发出信号,从而达到当快递机器人运输时在斜坡发生断电时,自动工作人员进行信号提醒的效果。
附图说明
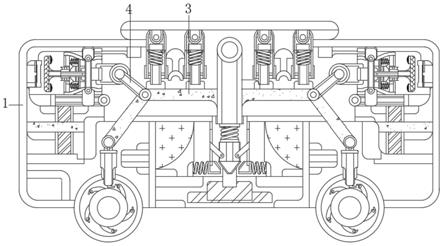
17.图1为本发明壳体结构正面剖视图;
18.图2为本发明导向杆结构的局部剖视图;
19.图3为本发明受力杆结构的局部剖视图;
20.图4为本发明导柱结构的局部剖视图;
21.图5为本发明移动杆结构的局部剖视图。
22.图中:1、壳体;2、传动机构;21、滚轮;22、卡接盘;23、受力杆;24、限位块;25、传递杆;3、连杆;4、拉杆;5、触发机构;51、导柱;52、导向板;53、拉伸弹簧;54、按压块;55、触发端口;6、制动机构;61、移动杆;62、复位弹簧;63、聚能弹簧;64、挤压块;65、抗阻弹簧;66、摩擦板。
具体实施方式
23.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
24.实施例一:
25.请参阅图1、图2和图5,一种快递运输机器人在上坡时断电后自动制停的保护装置,包括触发机构5和制动机构6,制动机构6内部包括移动杆61,移动杆61左端固定连接有连杆3,连杆3上端固定连接有复位弹簧62,移动杆61下端固定连接有聚能弹簧63,聚能弹簧63下端固定连接有挤压块64,挤压块64左端活动连接有抗阻弹簧65,挤压块64下端固定连接有摩擦板66。
26.工作开始时,此时快递机器人上坡时,当机器人坡度过高,同时内部电量不足时,此时容易发生断电危险,当机器人断电时,此时机器失去动力,从而在重力作用下向坡下移
动,进而使得滚轮21逆时针转动,从而带动卡接盘22一起转动,在卡接盘22转动的过程中,卡接盘22外表面的挂钩勾住受力杆23下端,从而在卡接盘22转动时对受力杆23有个向下的拉力,使得受力杆23向下移动,进而在限位块24的作用下,稳定向下移动,当受力杆23向下移动时,通过传递杆25带动连杆3也向下移动,从而对复位弹簧62有个拉力,使得复位弹簧62内部受力拉伸,从而内部聚集弹性势能,为连杆3的复位做准备,同时因移动杆61与连杆3的连接关系,从而使得移动杆61也向下移动,进而通过聚能弹簧63带动挤压块64一起向下移动,但因抗阻弹簧65的阻力作用,从而使得挤压块64只有向下运动的趋势,此时为坡度较低,通过内部复位弹簧62的拉力作用,从而对机器人进行一个制动效果,当坡度较高,同时机器人质量过大时,从而使得连杆3依旧向下移动,进而使得挤压块64推开抗阻弹簧65向下移动,从而使得挤压块64带动摩擦板66向下移动,进而使得摩擦板66伸出壳体1下端,从而大面积与地面相接触,从而增大与地面的摩擦力,进而使得机器人停止运动,从而达到当快递机器人在斜坡突遇断电危险时,自动对机器人进行紧急制动的效果。
27.实施例二:
28.请参阅图1、图2、图4,一种快递运输机器人在上坡时断电后自动制停的保护装置,包括触发机构5和制动机构6,制动机构6内部包括移动杆61,移动杆61左端固定连接有连杆3,连杆3上端固定连接有复位弹簧62,移动杆61下端固定连接有聚能弹簧63,聚能弹簧63下端固定连接有挤压块64,挤压块64左端活动连接有抗阻弹簧65,挤压块64下端固定连接有摩擦板66,触发机构5内部包括导柱51,导柱51上端固定连接有导向板52,导向板52左端固定连接有拉伸弹簧53,导向板52左端固定连接有按压块54,按压块54右端活动连接有触发端口55,触发端口55连接无线电源,与控制中心相连通,按压块54位于壳体1内壁左端。
29.同时在连杆3向下移动的过程中,对拉杆4有个向下的拉力,因拉杆4为倾斜杆,从而使得拉杆4对导柱51有个向右的拉力,从而通过导向板52对拉伸弹簧53有个向右的拉力,使得拉伸弹簧53内部受力拉伸,从而内部聚集弹性势能,为导向板52的复位做准备,同时随着导向板52向右移动时,带动按压块54一起向右移动,从而从而与触发端口55相接触,使得触发端口55内部隐藏电源接通,从而对总部控制室发出信号,从而达到当快递机器人运输时在斜坡发生断电时,自动工作人员进行信号提醒的效果。
30.实施例三:
31.请参阅图1-5,一种快递运输机器人在上坡时断电后自动制停的保护装置,包括触发机构5和制动机构6,制动机构6内部包括移动杆61,移动杆61左端固定连接有连杆3,连杆3上端固定连接有复位弹簧62,移动杆61下端固定连接有聚能弹簧63,聚能弹簧63下端固定连接有挤压块64,挤压块64左端活动连接有抗阻弹簧65,挤压块64下端固定连接有摩擦板66,触发机构5内部包括导柱51,导柱51上端固定连接有导向板52,导向板52左端固定连接有拉伸弹簧53,导向板52左端固定连接有按压块54,按压块54右端活动连接有触发端口55,触发端口55连接无线电源,与控制中心相连通,按压块54位于壳体1内壁左端,还包括有传动机构2,传动机构2内部包括有滚轮21,滚轮21前端固定连接有卡接盘22,卡接盘22外表面固定连接有挂钩,挂钩朝向左端,受力杆23下端固定连接有挂钩,滚轮21有两个,且关于壳体1内部中心线左右对称,卡接盘22上端活动连接有受力杆23,受力杆23右端活动连接有限位块24,受力杆23上端活动连接有传递杆25,传递杆25上端活动连接有连杆3,连杆3左端活动连接有拉杆4,摩擦板66位于滚轮21右端,摩擦板66位于壳体1内壁下端,传递杆25上端活
动连接有拉杆4。
32.工作原理:工作开始时,此时快递机器人上坡时,当机器人坡度过高,同时内部电量不足时,此时容易发生断电危险,当机器人断电时,此时机器失去动力,从而在重力作用下向坡下移动,进而使得滚轮21逆时针转动,从而带动卡接盘22一起转动,在卡接盘22转动的过程中,卡接盘22外表面的挂钩勾住受力杆23下端,从而在卡接盘22转动时对受力杆23有个向下的拉力,使得受力杆23向下移动,进而在限位块24的作用下,稳定向下移动,当受力杆23向下移动时,通过传递杆25带动连杆3也向下移动,从而对复位弹簧62有个拉力,使得复位弹簧62内部受力拉伸,从而内部聚集弹性势能,为连杆3的复位做准备,同时因移动杆61与连杆3的连接关系,从而使得移动杆61也向下移动,进而通过聚能弹簧63带动挤压块64一起向下移动,但因抗阻弹簧65的阻力作用,从而使得挤压块64只有向下运动的趋势,此时为坡度较低,通过内部复位弹簧62的拉力作用,从而对机器人进行一个制动效果,当坡度较高,同时机器人质量过大时,从而使得连杆3依旧向下移动,进而使得挤压块64推开抗阻弹簧65向下移动,从而使得挤压块64带动摩擦板66向下移动,进而使得摩擦板66伸出壳体1下端,从而大面积与地面相接触,从而增大与地面的摩擦力,进而使得机器人停止运动,从而达到当快递机器人在斜坡突遇断电危险时,自动对机器人进行紧急制动的效果。
33.同时在连杆3向下移动的过程中,对拉杆4有个向下的拉力,因拉杆4为倾斜杆,从而使得拉杆4对导柱51有个向右的拉力,从而通过导向板52对拉伸弹簧53有个向右的拉力,使得拉伸弹簧53内部受力拉伸,从而内部聚集弹性势能,为导向板52的复位做准备,同时随着导向板52向右移动时,带动按压块54一起向右移动,从而从而与触发端口55相接触,使得触发端口55内部隐藏电源接通,从而对总部控制室发出信号,从而达到当快递机器人运输时在斜坡发生断电时,自动工作人员进行信号提醒的效果。
34.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1