双足机器人及四足机器人的制作方法
1.本技术实施例涉及机器人技术领域,特别涉及一种双足机器人及四足机器人。
背景技术:
2.随着机器人的快速发展,机器人的应用领域也越来越广泛,机器人所需实现的功能也越来越多,而机器人首先要满足的功能就是自身的运动,尤其是在足式机器人中,如何实现机器人能够模拟动物腿部的行走状态,是一个重要的研究方向。
3.目前的足式机器人,通过在机器人关节处设置执行器,能够带动机器人腿部结构中的大腿相对髋关节转动,或者带动小腿相对膝关节转动,但是,机器人腿部结构处的自由度较少,仅能实现腿部的弯曲或者伸展,机器人行走过程中腿部结构较为僵硬,不利于实现机器人的多方位行走,因此,有必要设计一种能够实现腿部多方位动作的机器人,以便实现机器人的多方位行走。
技术实现要素:
4.本技术实施方式的目的在于提供一种双足机器人及四足机器人,能够实现腿部的多方位动作,以便实现机器人的多方位行走。
5.为解决上述技术问题,本技术的实施方式提供了一种双足机器人,包括躯干,安装于躯干上的头部、两个手臂以及两个髋关节执行器,与两个髋关节执行器一一对应的两个腿部;每个腿部包括大腿、连杆、膝关节、小腿以及脚掌,大腿与连杆的一端均安装于髋关节执行器,大腿与连杆的另一端均与膝关节铰接,小腿的两端分别与膝关节、脚掌连接;髋关节执行器可驱动大腿及连杆绕髋关节执行器的轴向以及径向转动。
6.本技术的实施方式还提供了一种四足机器人,包括上述的双足机器人、连接件和两个后腿;连接件安装于躯干;每个后腿包括一个髋关节执行器和一个腿部,每个后腿的髋关节执行器安装于连接件。
7.本技术实施方式提供的双足机器人及四足机器人,躯干与头部、两个手臂以及两个腿部共同形成仿人型结构,每个腿部可在对应的髋关节执行器驱动下实现多方位动作,其中,在髋关节执行器驱动大腿及连杆绕髋关节执行器轴向沿同一方向转动时,可以实现机器人腿部的抬起或者放下,在髋关节执行器驱动大腿及连杆绕髋关节执行器轴向沿相反方向转动时,可以实现机器人腿部的弯曲或者伸展,在髋关节执行器驱动大腿及连杆绕髋关节执行器径向沿同一方向或者相反方向转动时,可以实现机器人腿部的偏航,从而实现机器人腿部的多方位动作,以便实现机器人的多方位行走。
8.另外,髋关节执行器包括同轴设置的第一转动环和第二转动环,大腿的一端经第一连接件与第一转动环连接、并可随第一连接件绕第一转动环的径向转动,第二转动环经第二连接件与第一连接件连接,第二转动环相对第一转动环转动时、可经第二连接件带动第一连接件绕第一转动环的径向转动。这样,通过第一转动环和第二转动环的动作,可以驱动大腿向不同方向运动。
9.另外,第二转动环有两个,两个第二转动环位于第一转动环轴线方向的两侧,每个第二转动环经一个第二连接件与第一连接件连接。这样,可以经第二连接件从第一转动环的两侧分别对大腿施加驱动力,从而提高驱动大腿动作时的力矩。
10.另外,髋关节执行器还包括同轴设置的第三转动环和第四转动环,连杆的一端经第三连接件与第三转动环连接、并可随第三连接件绕第三转动环的径向转动,第四转动环经第四连接件与第三连接件连接,第四转动环相对第三转动环转动时、可经第四连接件带动第三连接件绕第三转动环的径向转动。这样,通过第三转动环和第四转动环的动作,可以驱动连杆向不同方向运动。
11.另外,第四转动环有两个,两个第四转动环位于第三转动环轴向方向的两侧,每个第四转动环经一个第四连接件与第三连接件连接。这样,可以经第四连接件从第三转动环的两侧分别对连杆施加驱动力,从而提高驱动连杆动作时的力矩。
12.另外,每个腿部还包括两个脚掌执行器,两个脚掌执行器均设置在膝关节上,每个脚掌执行器的输出端通过一个支杆与脚掌连接、以带动脚掌前后俯仰和/或左右倾斜。这样,可以通过两个脚掌执行器驱动脚掌实现相应动作。
13.另外,躯干包括基座、摆腰执行器和两个摆臂执行器,两个髋关节执行器安装于基座,摆腰执行器安装于基座,两个摆臂执行器与摆腰执行器的输出端连接,头部与两个摆臂执行器连接,两个手臂分别与两个摆臂执行器的输出端一对一连接。这样,躯干可以通过摆腰执行器可以实现双足机器人中位于摆腰执行器上方的部分相对基座左右摆动,通过摆臂执行器可以驱动手臂前后摆动。
14.另外,每个手臂包括抬臂执行器、上臂、肘部执行器、前臂以及手掌,抬臂执行器与摆臂执行器的输出端连接,上臂分别与抬臂执行器的输出端、肘部执行器连接,前臂分别与肘部执行器的输出端、手掌连接。这样,可以通过抬臂执行器驱动上臂、前臂及手掌抬起或者放下,通过肘部执行器驱动前臂相对上臂抬起或者放下。
15.另外,头部包括转头执行器、点头执行器和摆头执行器,转头执行器与两个摆臂执行器连接,点头执行器与转头执行器的输出端连接,摆头执行器与点头执行器的输出端连接。这样,可以通过头部处的不同执行器使头部实现相应动作。
附图说明
16.一个或多个实施例通过与之对应的附图中的图片进行示例性说明,这些示例性说明并不构成对实施例的限定,附图中具有相同参考数字标号的元件表示为类似的元件,除非有特别申明,附图中的图不构成比例限制。
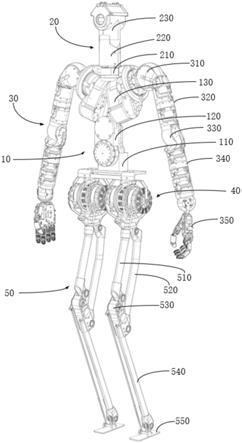
17.图1是本技术实施例提供的双足机器人的立体结构示意图;
18.图2是本技术实施例提供的双足机器人中髋关节执行器的立体结构示意图;
19.图3是本技术实施例提供的双足机器人中髋关节执行器的侧视结构示意图;
20.图4是本技术实施例提供的双足机器人中小腿处的连接结构示意图。
具体实施方式
21.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合附图对本技术的各实施方式进行详细的阐述。然而,本领域的普通技术人员可以理解,在本技术各实施方
式中,为了使读者更好地理解本技术而提出了许多技术细节。但是,即使没有这些技术细节和基于以下各实施方式的种种变化和修改,也可以实现本技术所要求保护的技术方案。以下各个实施例的划分是为了描述方便,不应对本技术的具体实现方式构成任何限定,各个实施例在不矛盾的前提下可以相互结合相互引用。
22.除非另有定义,本文所使用的所有的技术和科学术语与属于本技术的技术领域的技术人员通常理解的含义相同;本文中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本技术;本技术的说明书和权利要求书及上述附图说明中的术语“包括”和“具有”以及它们的任何变形,意图在于覆盖不排他的包含。
23.在本技术实施例的描述中,技术术语“第一”“第二”等仅用于区别不同对象,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量、特定顺序或主次关系。在本技术实施例的描述中,“多个”的含义是两个以上,除非另有明确具体的限定。
24.在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本技术的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
25.在本技术实施例的描述中,术语“和/或”仅仅是一种描述关联对象的关联关系,表示可以存在三种关系,例如a和/或b,可以表示:单独存在a,同时存在a和b,单独存在b这三种情况。另外,本文中字符“/”,一般表示前后关联对象是一种“或”的关系。
26.在本技术实施例的描述中,除非另有明确的规定和限定,技术术语“安装”“相连”“连接”“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;也可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术实施例中的具体含义。
27.随着机器人的快速发展,机器人的应用领域也越来越广泛,例如服务型机器人、医疗机器人以及工业机器人等,机器人能够实现各种需求(例如抓取、转移、行走等)的基础,在于机器人各部位(如机器人的各关节)能够进行相应的动作。对于足式机器人来说,最关键地在于能够模拟动物腿部的行走状态,即腿部的动作。
28.目前机器人各部位的运动由靠近该部位的执行器驱动,机器人中应用的执行器通常以驱动机器人相应部位转动为主,例如,为了实现机器人腿部的弯曲或者伸展,可以在机器人的髋关节以及膝关节处各设置一个执行器,髋关节处的执行器可以驱动机器人的大腿相对髋关节转动,膝关节处的执行器可以驱动机器人的小腿相对膝关节转动。这样,在机器人髋关节处的执行器以及膝关节处的执行器共同驱动下,可以实现机器人腿部的弯曲或者伸展,从而实现机器人的行走。
29.但是,目前的仿人型机器人中,机器人腿部的自由度(自由度是根据机械原理,机构具有确定运动时所必须给定的独立运动参数的数目)较少,机器人行走过程中腿部结构较为僵硬,不利于实现机器人的多方位行走。
30.为了实现机器人腿部的多方位动作,申请人发现,可以在机器人大腿处设计连杆,连杆与大腿一起连接髋关节执行器与膝关节,通过髋关节执行器驱动大腿以及连杆运动,来实现机器人腿部的多方位动作。具体地,髋关节执行器可以驱动大腿及连杆绕髋关节执
行器轴向以及径向转动。
31.在髋关节执行器驱动大腿及连杆绕髋关节执行器轴向沿同一方向转动时,可以实现机器人腿部的抬起或者放下,在髋关节执行器驱动大腿及连杆绕髋关节执行器轴向沿相反方向转动时,可以实现机器人腿部的弯曲或者伸展,在髋关节执行器驱动大腿及连杆绕髋关节执行器径向沿同一方向或者相反方向转动时,可以实现机器人腿部的偏航。
32.在附图中,图1示出了本技术实施例提供的双足机器人立体结构,图2与图3分别示出了本技术实施例提供的双足机器人中髋关节执行器的立体结构与侧视结构,图4示出了本技术实施例提供的双足机器人中小腿处的连接结构。
33.本技术实施例提供的双足机器人包括躯干10,安装于躯干10上的头部20、两个手臂30以及两个髋关节执行器40,与两个髋关节执行器40一一对应的两个腿部50;每个腿部50包括大腿510、连杆520、膝关节530、小腿540以及脚掌550,大腿510与连杆520的一端均安装于髋关节执行器40,大腿510与连杆520的另一端均与膝关节530铰接,小腿540的两端分别与膝关节530、脚掌550连接;髋关节执行器40可驱动大腿510及连杆520绕髋关节执行器40的轴向以及径向转动。此处髋关节执行器40的轴向为水平方向,髋关节执行器40的径向垂直于水平方向。需要说明的是,本方案的创意在于通过髋关节执行器40驱动大腿510与连杆520可绕两个相对正交的方向转动,轴线和径向两个标准方向仅为便于描述的举例,绕相对轴向与径向偏差的方向转动,也应在本方案思想所涵盖的范围内。
34.躯干10是双足机器人中用于连接头部20、两个手臂30以及两个腿部50的部分,躯干10与头部20、两个手臂30以及两个腿部50共同形成双足机器人的仿人型结构,两个髋关节执行器40用于将两个腿部50分别安装至躯干10上,每个腿部50的大腿510和连杆520可以在髋关节执行器40的驱动下运动,而每个腿部50的小腿540则在大腿510和连杆520的带动下一起运动,每个腿部50的脚掌550用于在地面上行走。
35.本技术实施例提供的双足机器人,躯干10与头部20、两个手臂30以及两个腿部50共同形成仿人型结构,每个腿部50可在对应的髋关节执行器40驱动下实现多方位动作,其中,在髋关节执行器40驱动大腿510及连杆520绕髋关节执行器40轴向沿同一方向转动时,可以实现机器人腿部50的抬起或者放下,在髋关节执行器40驱动大腿510及连杆520绕髋关节执行器40轴向沿相反方向转动时,可以实现机器人腿部50的弯曲或者伸展,在髋关节执行器40驱动大腿510及连杆520绕髋关节执行器40径向沿同一方向或者相反方向转动时,可以实现机器人腿部50的偏航,从而实现机器人腿部50的多方位动作,以便实现机器人的多方位行走。
36.在本技术的一些实施例中,可选地,髋关节执行器40包括同轴设置的第一转动环410和第二转动环420,大腿510的一端经第一连接件511与第一转动环410连接、并可随第一连接件511绕第一转动环410的径向转动,第二转动环420经第二连接件421与第一连接件511连接,第二转动环420相对第一转动环410转动时、可经第二连接件421带动第一连接件511绕第一转动环410的径向转动。此处第一转动环410的径向为垂直于自身中心轴线的方向。
37.第一转动环410和第二转动环420为髋关节执行器40中的两个转动输出部件,第一转动环410和第二转动环420同轴设置,即第一转动环410的中心轴线和第二转动环420的中心轴线重合,大腿510的端部经第一连接件511连接至第一转动环410,同时,第二转动环420
经第二连接件421连接至第一连接件511。
38.通过第一转动环410和第二转动环420的动作,可以驱动大腿510向不同方向运动,在第一转动环410和第二转动环420沿同一方向同步转动时,可以驱动大腿510绕髋关节执行器40的轴向转动,此时,大腿510可以相对髋关节执行器40向前方或后方动作;在第一转动环410相对第二转动环420转动时,即第一转动环410与第二转动环420处于非同步转动状态时,第二转动环420可以经第二连接件421驱动大腿510绕髋关节执行器40的径向转动,即驱动大腿510实现偏航,此时,大腿510可以相对髋关节执行器40向左方或者右方动作。
39.在本技术的一些实施例中,可选地,第二转动环420有两个,两个第二转动环420位于第一转动环410轴向方向的两侧,每个第二转动环420经一个第二连接件421与第一连接件511连接。
40.通过两个第二转动环420,可以经第二连接件421从第一转动环410的两侧分别对大腿510施加驱动力,从而提高驱动大腿510动作时的力矩,以提高大腿510动作时的流畅度。
41.在本技术的一些实施例中,可选地,髋关节执行器40还包括同轴设置的第三转动环430和第四转动环440,连杆520的一端经第三连接件521与第三转动环430连接、并可随第三连接件521绕第三转动环430的径向转动,第四转动环440经第四连接件441与第三连接件521连接,第四转动环440相对第三转动环430转动时、可经第四连接件441带动第三连接件521绕第三转动环430的径向转动。此处第三转动环430的径向为垂直于自身中心轴线的方向。
42.通过第三转动环430和第四转动环440的动作,可以驱动连杆520向不同方向运动,在第三转动环430和第四转动环440沿同一方向同步转动时,可以驱动连杆520绕髋关节执行器40的轴向转动,此时,连杆520可以相对髋关节执行器40向前方或后方动作;在第三转动环430相对第四转动环440转动时,即第三转动环430与第四转动环440处于非同步转动状态时,第四转动环440可以经第四连接件441驱动连杆520绕髋关节执行器40的径向转动,即驱动连杆520实现偏航,此时,连杆520可以相对髋关节执行器40向左方或者右方动作。
43.在本技术的一些实施例中,可选地,第四转动环440有两个,两个第四转动环440位于第三转动环430轴向方向的两侧,每个第四转动环440经一个第四连接件441与第三连接件521连接。
44.通过两个第四转动环440,可以经第四连接件441从第三转动环430的两侧分别对连杆520施加驱动力,从而提高驱动连杆520动作时的力矩,以提高连杆520动作时的流畅度。
45.此处的髋关节执行器40可以集成多个执行器,如在一种具体的实施例中,髋关节执行器40可以集成四个执行器,每个执行器可以由电机和减速器形成,电机的输出可以通过减速器传递至相应的输出法兰(即髋关节执行器40的转动环,如第一转动环410、第二转动环420、第三转动环430和第四转动环440),每个执行器的输出法兰通过连接件驱动大腿510及连杆520动作。其中,大腿510的驱动结构与连杆520的驱动结构类似,均是通过髋关节执行器40中的两类转动环进行驱动,而髋关节执行器40的两类转动环与大腿510及连杆520之间均通过连接件连接,以在驱动大腿510及连杆520绕髋关节执行器40的轴向转动(用于实现大腿510及连杆520的抬起或者放下)的同时,可以驱动大腿510及连杆520绕髋关节执
行器40的径向转动(用于驱动大腿510及连杆520的偏航)。
46.在本技术的一些实施例中,可选地,每个腿部50还包括两个脚掌执行器560,两个脚掌执行器560均设置在膝关节530上,每个脚掌执行器560的输出端通过一个支杆561与脚掌550连接、以带动脚掌550前后俯仰和/或左右倾斜。
47.此处两个脚掌执行器560用于驱动脚掌550动作,小腿540与脚掌550连接处采用万向节结构,每个支杆561与脚掌550之间经关节轴承转动连接,在两个脚掌执行器560的输出端在图中所示状态沿同一方向驱动支杆561动作时,可以带动脚掌550前后俯仰,在两个脚掌执行器560的输出端沿相反方向驱动支杆561动作时,可以带动脚掌550左右倾斜,而在两个脚掌执行器560的输出端沿同一方向以不同速率驱动支杆561动作时,可以在带动脚掌550前后俯仰的同时,使脚掌550有一定程度的左右倾斜。
48.另外,为了补偿两个脚掌执行器560由于上下叠置而带来的驱动速度差,可以通过改变其中一个脚掌执行器560的驱动速度,以使两个脚掌执行器560能够带动脚掌550前后俯仰或者左右倾斜。
49.在本技术的一些实施例中,可选地,躯干10包括基座110、摆腰执行器120和两个摆臂执行器130,两个髋关节执行器40安装于基座110,摆腰执行器120安装于基座110,两个摆臂执行器130与摆腰执行器120的输出端连接,头部20与两个摆臂执行器130连接,两个手臂30分别与两个摆臂执行器130的输出端一对一连接。
50.基座110在躯干10部分中用于连接两个髋关节执行器40的固定架450,摆腰执行器120在躯干10部分中用于驱动头部20、两个摆臂执行器130及两个手臂30左右摆动,摆臂执行器130在躯干10部分中用于驱动对应的手臂30前后摆动。
51.躯干10通过摆腰执行器120可以实现双足机器人中位于摆腰执行器120上方的部分相对基座110左右摆动,通过摆臂执行器130可以驱动手臂30前后摆动。
52.在本技术的一些实施例中,可选地,每个手臂30包括抬臂执行器310、上臂320、肘部执行器330、前臂340以及手掌350,抬臂执行器310与摆臂执行器130的输出端连接,上臂320分别与抬臂执行器310的输出端、肘部执行器330连接,前臂340分别与肘部执行器330的输出端、手掌350连接。
53.抬臂执行器310在手臂30中用于驱动上臂320、前臂340及手掌350抬起或者放下,肘部执行器330在手臂30中用于驱动前臂340相对上臂320抬起或者放下。
54.另外,可以分别在上臂320及前臂340中设置执行器,用于驱动上臂320部分即前臂340部分竖直转动,还可以在手臂30的手腕处设置执行器,用于驱动手掌350动作。
55.在本技术的一些实施例中,可选地,头部20包括转头执行器210、点头执行器220和摆头执行器230,转头执行器210与两个摆臂执行器130连接,点头执行器220与转头执行器210的输出端连接,摆头执行器230与点头执行器220的输出端连接。
56.转头执行器210用于实现头部20的水平转动,点头执行器220用于实现头部20的前后点头,摆头执行器230用于实现头部20的左右摆动。
57.本技术实施例还提供了一种四足机器人,包括上述实施例提供的双足机器人、连接件和两个后腿;连接件安装于躯干10;每个后腿包括一个髋关节执行器和一个腿部,每个后腿的髋关节执行器安装于连接件。通过在双足机器人中加入两个后腿,可以形成四足机器人,以扩展机器人的应用场景。
58.本领域的普通技术人员可以理解,上述各实施方式是实现本技术的具体实施例,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本技术的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1