一种高机动倍足式附肢机器人
1.本发明涉及一种高机动倍足式附肢机器人,该机器人共由四组腿机构组合而成,每组腿机构由单个电机通过同步带同步驱动,单电机驱动实现机器人的前进与后退,通过安装在躯干上的电动推杆的伸缩实现渐开线蹬滚模式、行走模式和粘附式越障模式三种模式的相互转换,附肢机构的设计使得机器人在渐开线蹬滚模式和粘附式越障模式下有着优越的性能,渐开线蹬滚模式用于平整地形实现机器人的快速移动,粘附式越障模式可用于垂直墙类障碍物实现高于自身高度的地形跨越,以达到兼顾移动速度和地形适应性的目的,可用于未来对未知星球的探测和侦察任务。
背景技术:
2.为提高移动机器人的综合能力,本发明将整体闭链技术与腿式移动技术相结合,将高效蹬滚技术与轮式移动技术相结合,设计本机器人,力求解决地面高速移动性和越障性的矛盾,在移动机器人领域提出了一种新的技术方案。
3.现有的足式机器人一般通过在腿部增加轮子来综合轮式机器人与足式机器人的优点,如中国专利cn114348299a“一种串联式轮腿行星探测器”。本发明采用的躯干整体变形重构设计方案将机构整体变形为轮子,同时设计的单自由度可变形躯干,可实现多模式之间的转换,综合轮式机器人的快速度和足式机器人的高越障能力,受摩洛哥翻滚蜘蛛的启发设计了仿生的渐开线蹬滚模式,为提高机器人越障高度设计了可借助障碍物表面摩擦力的粘附式越障模式,并且引入辅助附肢设计,使得这两种模式更好地完成,而两种模式的存在也大大提高了该机器人的综合能力。
技术实现要素:
4.本发明要解决的问题是提供一种高机动倍足式附肢机器人,相较于已有的足式步行机器人,通过可变形躯干以及附肢机构的设计,拓展了渐开线蹬滚模式和粘附式越障模式,在地形适应性,通过性以及越障能力上实现了良好的提高。
5.本发明的技术方案:
6.一种高机动倍足式附肢机器人由a、b、c、d组腿机构、前躯干、后躯干、g、h组附肢机构、姿态调整机构以及驱动系统六部分组成;所述的a、b、c、d组腿机构和前躯干、后躯干通过姿态调整机构实现固定连接;所述的g、h组附肢机构分别和c、d组腿机构实现固定连接;所述的驱动系统安装在后躯干上控制腿机构运动、附肢机构工作以及机器人整体变形。
7.所述的一种高机动倍足式附肢机器人的a至d组腿机构统一由安装于后躯干上的驱动主电机通过同步带驱动运动。
8.a组腿机构由a腿一、a腿二组成。
9.b组腿机构与a组腿机构在杆件形状、机械结构以及装配方式上完全相同。
10.所述的a腿一包括:a腿一第一杆至a腿一第六杆和a腿一足端。
11.c、d组腿机构与a、b组腿机构不同之处在于:
12.前者的第五杆需安装附肢机构因而在杆件形状有所不同;前者的腿一与腿二之间需安装同步带轮。
13.所述的驱动系统包括腿部驱动系统、躯干变形驱动系统、附肢变形驱动系统;躯干变形驱动系统包括电动推杆,电动推杆连接前躯干和后躯干,通过电动推杆的伸缩实现渐开线蹬滚模式、行走模式和粘附式越障模式三种模式之间的切换。
14.所述的渐开线蹬滚模式指电动推杆完全收缩时,整个机器人变形为球形,通过附肢变形驱动系统驱动外侧附肢机构进行伸长蹬地从而推动机器人滚动;所述的行走模式模式指电动推杆伸长一定长度时,机器人通过腿部驱动系统驱动四组腿机构运动实现机器人的行走;所述的粘附式越障模是指电动推杆完全伸出时,前、后躯干完全展开,同时由于a、b、c、d组腿机构与前躯干、后躯干均有相应杆件连接,且前后躯干由铰链连接,机器人通过两个平面四杆机构将躯干变形与腿部俯仰结合,实现躯干与腿部联合变形,因此腿机构可垂直攀爬墙面并通过附肢机构的辅助实现高障碍的通过。
15.本发明和已有技术相比具有的有益效果:
16.本发明结合足式和轮式机器人的各自的优点,利用整体闭链技术和高效蹬滚技术,将高移动速度和优秀越障性融合在一起,相较于已有的轮足式机器人有着更好的快速移动能力和越障性能,同时,腿机构单电机驱动和多机构变形耦合的设计减轻了机器人的控制复杂度,闭链腿机构的设计使该机器人具有更高的承载能力,此外,附肢机构的设计使得机器人在粘附式越障模式下可实现对高于机器人自身高度的垂直墙的攀爬和翻越。
附图说明
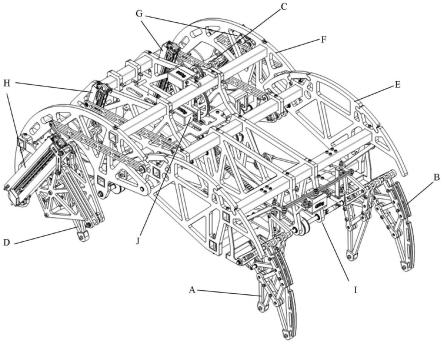
17.图1:一种高机动倍足式附肢机器人行走模式整体三维图;
18.图2:一种高机动倍足式附肢机器人渐开线蹬滚模式整体三维图;
19.图3:一种高机动倍足式附肢机器人粘附式越障模式整体三维图;
20.图4:g内侧附肢机构收起时的正视图;
21.图5:g内侧附肢机构展开时的正视图;
22.图6:g外侧附肢机构收起时的正视图;
23.图7:g外侧附肢机构展开时的正视图;
24.图8:c组腿机构及g组附肢机构装配三维图;
25.图9:a组腿机构三维图;
26.图10:机器人转向时的俯视图;
27.图11:驱动系统安装布置的参照图;
28.图12:附肢变形驱动系统机构三维图。
具体实施方式
29.下面结合附图对本发明作进一步说明。
30.如图1所示一种高机动倍足式附肢机器人由a、b、c、d组腿机构(a、b、c、d)、前躯干(e)、后躯干(f)、g、h组附肢机构(g、h)、姿态调整机构(i)以及驱动系统(j) 六部分组成。a、b、c、d组腿机构(a、b、c、d)由两个平面六杆机构构成,一组腿机构中两腿第一杆相位差为180
°
;可变形躯干前躯干(e)和后躯干(f)两个部分之间使用铰链连接,前躯干(e)与a、b组
腿机构(a、b)通过转向架及前躯干安装板连接,与c、d 组腿机构(c、d)通过后腿调整杆连接,后躯干(f)与a、b组腿机构(a、b)通过前腿起伏调整杆连接,与c、d组腿机构(c、d)通过后躯干安装板连接;一组附肢机构包括内侧附肢和外侧附肢,两组附肢机构分别固定在c、d腿组(c、d)内侧两条腿和外侧两条腿的第五杆上;四组腿机构由安装于后躯干(e)上的单个电机通过同步带同步驱动。图1所示为该高机动倍足式附肢机器人行走模式。
31.如图2所示,电动推杆完全收缩,腿部机构随着躯干的收拢而变形,机器人整体变为球形,机器人由行走模式进入渐开线蹬滚模式,此时驱动方式为附肢变形驱动系统(j-3)驱动外侧附肢机构运动做渐开线蹬地动作,推动机器人向前快速滚动;同时机器人处于渐开线蹬滚模式时的横截面并非完整的圆,在机身下方设置了一个缺口,其目的是确定蹬滚的起始和结束时的姿态,当机器人滚过一圈至缺口处接触地面后,机器人会停止滚动,在合适的时机再次伸出附肢蹬地,即可持续滚动。外侧附肢机构运动前后如图6、7所示。
32.如图3所示,电动推杆完全伸长,附肢机构伸长,机器人进入粘附式越障模式,前腿机构借助摩擦力在垂直墙面开始攀爬,到达顶部后继续向前行走,待后腿也抵达顶部后收回附肢机构,完成越障。
33.如图4所示,所述的g组附肢机构(g)包括g内侧附肢(g-1)和g外侧附肢(g-2);
34.g内侧附肢(g-1)包括:g碳纤维矩形管1(g-1-1)、g碳纤维矩形管2(g-1-2)、g鲍登线(g-1-3)、g微型滑轨1(g-1-4)、g微型滑块1(g-1-5)、g滑轨连接钢片1(g-1-6)、g 橡胶足端(g-1-7)、g钢丝绳固定板1(g-1-8)、g连接拉簧(g-1-9)、g钢丝绳固定板2(g-1-10)、 g滑轨连接钢片2(g-1-11)、g微型滑块2(g-1-12)、g微型滑轨2(g-1-13)、g钢丝绳(g-1-14)、 g变速线固定器(g-1-15)、gv刹弯管(g-1-16)。
35.g内侧附肢(g-1)中部件的连接方式为:
36.g碳纤维矩形管1(g-1-1)与g变速线固定器(g-1-3)通过连接轴实现固定连接;gv刹弯管(g-1-16)与g变速线固定器(g-1-15)通过限位孔实现固定连接;g微型滑块1(g-1-5)、 g钢丝绳固定板1(g-1-8)与g碳纤维矩形管1(g-1-1)三者通过螺丝实现固定连接;g微型滑块2(g-1-12)、g钢丝绳固定板2(g-1-11)与g碳纤维矩形管2(g-1-2)三者通过螺丝实现固定连接;g微型滑块1(g-1-5)与g微型滑轨1(g-1-4)通过装配实现滑动连接;g 微型滑块2(g-1-12)与g微型滑轨2(g-1-13)通过装配实现滑动连接;g微型滑轨1(g-1-5) 和g微型滑轨2(g-1-13)分别与g滑轨连接钢片1(g-1-8)、g滑轨连接钢片2(g-1-11)通过螺丝实现固定连接;g钢丝绳(g-1-14)分别与g钢丝绳固定板1(g-1-6)、g钢丝绳固定板2(g-1-11)通过夹紧实现固定连接;g钢丝绳(g-1-12)分别与g滑轨连接钢片1(g-1-8)、 g滑轨连接钢片2(g-1-10)通过带u槽的深沟球轴承实现转动连接;g鲍登线(g-1-13)一端与g滑轨连接钢片2(g-1-11)实现固定连接,另一端通过gv刹弯管(g-1-16)与驱动系统(j)相连;g连接拉簧(g-1-9)一端与g滑轨连接钢片2(g-1-11)实现固定连接,另一端与g碳纤维矩形管2(g-1-2)通过螺丝轴实现固定连接;g橡胶足端(g-1-7)与g碳纤维矩形管2(g-1-2)通过螺丝实现固定连接。
37.单个附肢机构可实现单自由度驱动伸缩,其机构工作原理以g内侧附肢(g-1)为例阐述如下:驱动系统(j)通过拉紧g鲍登线(g-1-3),带动g碳纤维矩形管2(g-1-2)伸长,g 微型滑块2(g-1-12)随之一起在g微型滑轨2(g-1-13)上移动,进一步地,带动g钢丝绳 (g-1-14)移动,g钢丝绳(g-1-14)再带动g微型滑块1(g-1-5)在g微型滑轨1(g-1-4) 移动进一步
伸长g碳纤维矩形管2(g-1-2)及固定在其上方的g橡胶足端(g-1-7)并实现附肢机构的一次完整展开,完全展开后的g内侧附肢(g-1)如图5所示;同时,通过放松g 鲍登线(g-1-3),在g连接拉簧(g-1-9)的作用下附肢机构再根据同样的原理完成收起。
38.g外侧附肢(g-2)与g内侧附肢(g-1)主体结构与连接方式上完全一致,但两者与腿机构的连接方式不同,g外侧附肢(g-2)相对于g内侧附肢(g-1)多出以下构件:g长连接杆(g-2-17)、g碳纤维板(g-2-18),且g外侧附肢(g-2)中的g外碳纤维矩形管1(g-2-1)、 g外滑轨连接钢片2(g-2-10)与g内侧附肢(g-1)中的对应构件结构形状不同。
39.如图6所示,g外侧附肢(g-2)中新构件的连接方式为:g长连接杆(g-2-17)与g外滑轨连接钢片2(g-2-10)通过螺丝轴实现转动连接;g长连接杆(g-2-17)与g碳纤维板(g-2-18)通过螺丝轴实现转动连接;g碳纤维板(g-2-18)与g外碳纤维矩形管1(g-2-1) 通过螺丝轴实现转动连接;其中完全伸长后的g外侧附肢(g-2)如图7所示。
40.如图8所示,g内侧附肢(g-1)与c组腿机构(c)的连接方式为:g碳纤维矩形管1 (g-1-1)与c腿一第五杆(c-1-5)通过螺丝轴及尼龙轴套实现固定连接;g外侧附肢(g-2) 与c组腿机构(c)的连接方式为:g碳纤维板(g-2-18)与c腿二第五杆(c-2-5)通过螺丝轴及尼龙轴套实现固定连接;
41.所述的h组附肢机构(h)结构形式与连接方式与g组附肢机构(g)完全一致,所不同的是h组附肢机构(h)安装在d组腿机构(d)上,而g组附肢机构(g)安装在c组腿机构(c)上。
42.如图9所示,所述的a组腿机构(a)包括两个腿部连杆机构即a腿一(a-1)、a腿二(a-2)。
43.所述的a腿一(a-1)包括:a腿一第一杆至a腿一第六杆(a-1-1、a-1-2、a-1-3、a-1-4、 a-1-5、a-1-6)和a腿一足端(a-1-7)。
44.a腿一(a-1)中部件的连接方式为:
45.a腿一第一、二、五杆(a-1-1、a-1-2、a-1-5)为二副杆件,其余杆件为三副杆件;a 腿一第一杆(a-1-1)的第一转动副与a腿一第二杆(a-1-2)的第一转动副通过装配轴实现转动连接;a腿一第一杆(a-1-1)的第二转动副与a腿一第四杆(a-1-4)的第一转动副通过装配轴实现转动连接;a腿一第二杆(a-1-2)的第二转动副与a腿一第三杆(a-1-3)的第一转动副通过装配轴实现转动连接;a腿一第三杆(a-1-3)的第二转动副与a腿一第四杆 (a-1-4)的第二转动副通过装配轴实现转动连接;a腿一第三杆(a-1-3)的第三转动副与a 腿一第六杆(a-1-6)的第一转动副通过装配轴实现转动连接;a腿一第四杆(a-1-4)的第三转动副与a腿一第五杆(a-1-5)的第一转动副通过装配轴实现转动连接;a腿一第五杆(a-1-5) 的第二转动副与a腿一第六杆(a-1-6)的第二转动副通过装配轴实现转动连接;a腿一足端 (a-1-7)通过开设安装孔与a腿一第六杆(a-1-6)的第三转动副通过螺栓实现固定连接。
46.a腿二(a-2)中部件的结构形式与连接方式与a腿一(a-1)中部件的结构形式与连接方式相同,其中a腿二第二杆(a-2-2)与a腿一第二杆(a-1-2)内侧共用一个杆件,a腿二第一杆(a-2-1)与a腿一第一杆(a-1-1)的装配相位差为180
°
。
47.c、d组腿机构(c、d)与a、b组腿机构(a、b)中各杆件连接方式相同,四个腿组分布在机器人的四个角上,左右腿组采用镜像对称布置;前后腿组对应的第一杆设置在同一个相位上,八条腿中始终有四条为触地状态,并在同一瞬间切换为另外四条腿触地,这样可以增加整机的稳定性,机器人在行走过程中既不会左右横滚,也不会前后俯仰,只会产生一定的
起伏波动。
48.如图10所示,机器人通过姿态调整机构(i)进行前腿组的转向以及对不同模式时四个腿组俯仰角的控制。
49.所述的姿态调整机构(i)包括:转向架a(i-1a)、转向架b(i-1b)、转向杆a(i-2a)、转向杆b(i-2b)、前腿起伏调整杆a(i-3a)、前腿起伏调整杆b(i-3b)、三节万向轴a(i-4a)、三节万向轴b(i-4b)、前腿主动轴(i-5)和转向舵机(i-6)、转向舵盘(i-7)、后腿调整杆c1 (i-8c1)、后腿调整杆c2(i-8c1)、后腿调整杆d1(i-8d1)、后腿调整杆d2(i-8d2)。
50.应用于a组腿机构(a)的姿态调整机构(i)中部件的连接方式为:
51.转向架a(i-1a)的第一安装孔与a腿一第二杆(a-1-2)的第一转动副通过装配轴实现转动连接;转向架a(i-1a)的第二安装孔与a腿二第二杆(a-2-2)的第一转动副以及三节万向轴a(i-4a)一端通过装配轴实现转动连接;转向架a(i-1a)的第三安装孔与前躯干安装板1 (e-1)通过螺丝轴实现转动连接;转向架a(i-1a)的第四安装孔与前躯干安装板2(e-2) 通过螺丝轴实现转动连接;转向架a(i-1a)的第五安装孔与转向杆a(i-2a)的第一转动副通过螺丝轴实现转动连接;转向杆a(i-2a)的第二转动副与转向舵盘(i-7)通过螺丝轴实现转动连接;转向舵盘(i-7)与转向舵机(i-6)的输出轴通过螺丝实现固定连接;转向舵机(i-6) 与前驱干机架(e-5)通过螺丝实现固定连接;前腿起伏调整杆a(i-3a)的一端与a腿二第二杆(a-2-2)连接,另一端与后躯干机架(f-5)连接;三节万向轴a(i-4a)另一端与前腿主动轴(i-5)相连并安装于前躯干机架(e-5)上。
52.应用于b组腿机构(b)的姿态调整机构(i)中部件的连接方式与应用于a组腿机构(a) 的姿态调整机构(i)中部件的连接方式完全一致且两侧机构对称分布,其中转向杆a(i-2a) 和转向杆b(i-2b)与转向舵盘(i-7)连接在同一个孔上通过螺丝轴实现转动连接。
53.应用于c组腿机构(c)的姿态调整机构(i)中部件的连接方式为:
54.后腿调整杆c1(i-8c1)的第一安装孔与前躯干机架(e-5)通过螺丝轴实现转动连接;后腿调整杆c1(i-8c1)的第二安装孔与c腿一第二杆(c-1-2)通过卡簧轴实现转动连接;后腿调整杆c2(i-8c2)的第一安装孔与前躯干机架(e-5)通过螺丝轴实现转动连接;后腿调整杆c2(i-8c2)的第二安装孔与c腿二第二杆(c-1-2)通过卡簧轴实现转动连接;应用于d 组腿机构(d)的姿态调整机构(i)中部件的连接方式与应用于c组腿机构(c)的姿态调整机构(i)中部件的连接方式完全一致且两侧机构对称分布。
55.如图11所示,所述的驱动系统(j)包括腿部驱动系统(j-1)、躯干变形驱动系统(j-2)、附肢变形驱动系统(j-3);
56.腿部驱动系统(j-1)包括:后腿d同步带轮1(j-1-1)、驱动主电机(j-1-2)、后腿d同步带(j-1-3)、后腿d同步带轮2(j-1-4)、二级同步带轮1(j-1-5)、二级同步带(j-1-6)、二级同步带轮2(j-1-7)、后腿c同步带轮1(j-1-8)、后腿c同步带(j-1-9)、一级同步带轮 1(j-1-10)、一级同步带(j-1-11)、一级同步带轮2(j-1-12)、后腿c同步带轮2(j-1-13)、前腿同步带轮1(j-1-14)、前腿同步带(j-1-15)、前腿同步带轮2(j-1-16);驱动主电机(j-1-2) 安装在后躯干机架(f-5)上带动各级同步带统一驱动a、b、c、d组腿机构(a、b、c、d)。
57.躯干变形驱动系统(j-2)包括:电动推杆(j-2-1);电动推杆(j-2-1)基体端安装孔安装在后躯干机架(f-5)上,电动推杆(j-2-1)推杆端安装孔安装在前躯干机架(e-5)上;
58.如图12所示,附肢变形驱动系统(j-3)包括:越障绞盘(j-3-1)、蹬滚绞盘(j-3-2)、
丝杠固定碳纤维板(j-3-3)、滚珠丝杠(j-3-4)、丝杠螺母(j-3-5)、舵盘连挡块(j-3-6)、附肢舵盘1(j-3-7)、越障绞盘固定板(j-3-8)、附肢舵盘2(j-3-9)、伺服电机2(j-3-10)、双舵机固定碳纤维板(j-3-11)、伺服电机1(j-3-12)、蹬滚绞盘挡块(j-3-13)、置物板(j-3-14)、固定线头碳板(j-3-15)、固定线头钢板(j-3-16)。
59.附肢变形驱动系统(j-3)中部件的连接方式为:
60.丝杠固定碳纤维板(j-3-3)、双舵机固定碳纤维板(j-3-11)、越障绞盘固定板(j-3-8)以及置物板(j-3-14)均固定于后躯干机架(f-5)上;双舵机固定碳纤维板(j-3-11)与置物板 (j-3-14)通过螺丝实现固定连接;伺服电机1(j-3-12)与伺服电机2(j-3-10)上下布置安装在双舵机固定碳纤维板(j-3-11)上;附肢舵盘1(j-3-7)与伺服电机1(j-3-12)的电机输出轴通过螺丝实现固定连接;舵盘连挡块(j-3-6)与附肢舵盘1(j-3-7)通过螺丝实现固定连接;滚珠丝杠(j-3-4)一端与丝杠固定碳纤维板(j-3-3)实现固定连接,另一端与舵盘连挡块(j-3-6)通过深沟球轴承法兰实现转动连接;蹬滚绞盘(j-3-2)与丝杠螺母(j-3-5)通过螺丝实现固定连接后与丝杠形成转动配合;蹬滚绞盘挡块(j-3-13)内嵌于蹬滚绞盘(j-3-2) 中实现固定连接;越障绞盘(j-3-1)与越障绞盘固定板(j-3-8)的安装孔通过装配轴及深沟球轴承法兰实现转动连接,附肢舵盘2(j-3-9)与伺服电机2(j-3-10)的输出轴通过螺丝实现固定连接;越障绞盘(j-3-1)与附肢舵盘2(j-3-9)通过螺丝实现固定连接;固定线头碳板(j-3-15)与固定线头钢板(j-3-16)通过螺丝实现固定连接;固定线头钢板(j-3-16)与后躯干机架(f-5)通过螺丝实现固定连接。
61.附肢变形驱动系统(j-3)的工作原理为:四根由g、h组附肢机构(g、h)引出的鲍登线通过固定线头碳板(j-3-15)按如下方法接入绞盘:g、h组附肢机构(g、h)中的外侧附肢的两根鲍登线合并为一根后再引出两根分别接入越障绞盘(j-3-1)和蹬滚绞盘(j-3-2);g、 h组附肢机构(g、h)中的内侧附肢的两根刹车线统一接入越障绞盘(j-3-1);越障绞盘(j-3-1) 由伺服电机2(j-3-10)驱动负责在机器人进入粘附式越障模式后对g、h组附肢机构(g、h) 的驱动,越障绞盘(j-3-1)顺时针旋转两周,可以将四条附肢完全伸出,逆时针旋转两周则收回附肢;蹬滚绞盘(j-3-2)由伺服电机1(j-3-12)驱动负责在机器人进入渐开线蹬滚模式后对g、h组附肢机构(g、h)外侧附肢的驱动。其中,为保证附肢控制线的线速度进而确保机器人以设定的加速度蹬滚进行了计算并为蹬滚绞盘(j-3-2)设计了螺旋形外轮廓。在蹬滚模式下,伺服电机1(j-3-12)带动舵盘连挡块(j-3-6)会推动蹬滚绞盘(j-3-2)上的蹬滚绞盘挡块(j-3-13)使蹬滚绞盘(j-3-2)旋转,从而拉动外侧附肢;由于蹬滚绞盘(j-3-2) 同时固定在滚珠丝杠(j-3-4)的丝杠螺母(j-3-5)上,在伺服电机1(j-3-12)的作用下,蹬滚绞盘(j-3-2)会一边跟随舵盘连挡块(j-3-6)旋转一边远离舵盘连挡块(j-3-6);当蹬滚绞盘(j-3-2)旋转一整圈后,外侧附肢伸到最长位置,并且蹬滚绞盘挡块(j-3-13)会与舵盘连挡块(j-3-6)分开,同时外侧附肢会在连接拉簧的作用下立即收回,并带动蹬滚绞盘(j-3-2) 返回至初始位置,完成一次蹬滚。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1