一种地况自适应的跳跃机器人
1.本发明属于跳跃机器人领域,具体涉及一种地况自适应的跳跃机器人。
背景技术:
2.跳跃机器人可以执行跳跃动作越过障碍物(例如水中跳跃、陆地跳跃或水陆两栖跳跃),从而高效地通过复杂地形,在太空探索、战场侦察、生命救援等领域有着广阔的应用前景。
3.现有技术中存在采用四杆机构作为跳跃主体的跳跃机器人,将钛镍记忆合金弹簧(sma弹簧)作为驱动器;在初始状态,手动给机构复位,然后对sma弹簧加热,通过致动结构限制四杆机构运动进行储能,当储存能量达到目标值时,加热其他的sma弹簧驱动对致动结构解锁释放,将储存的势能转化为动能,实现跳跃。
4.上述现有技术中采用四杆机构,仅前后对称,机器人跳跃落地后姿态不定,存在多种落地姿势,因此难以在连续跳跃场景下进行应用。
技术实现要素:
5.本发明的主要目的是提供一种地况自适应的跳跃机器人,采用完全对称的跳跃主体结构,以提高经跳跃落地时的姿态稳定性。
6.为了实现上述主要目的,本发明提供了一种地况自适应的跳跃机器人,包括驱动装置以及对称型的跳跃主体,其中,跳跃主体包括安装板、支撑板、成对的一组主跳跃板以及成对的一组副跳跃板;
7.安装板和支撑板沿竖直方向间隔设置;
8.该成对的一组主跳跃板对称设置在竖直方向的前后两侧,并在驱动装置的驱动下可沿竖直方向进行折叠;主跳跃板包括第一上跳跃板和第一下跳跃板,第一上跳跃板和第一下跳跃板通过第一铰链连接;第一上跳跃板通过第二铰链与安装板连接,第一下跳跃板通过第三铰链与支撑板连接;其中,第一铰链、第二铰链和第三铰链之间相互平行;
9.该成对的一组副跳跃板对称设置在竖直方向的左右两侧,并在驱动装置的驱动下可沿竖直方向进行折叠;副跳跃板包括第二上跳跃板和第二下跳跃板;第二上跳跃板和第二下跳跃板通过第四铰链连接,第一铰链与第四铰链之间互相垂直且共面;第二上跳跃板通过第五铰链与安装板连接;支撑板上设有连接板,第二下跳跃板通过第六铰链与连接板连接,第六铰链位于第三铰链的上方;其中,第四铰链、第五铰链和第六铰链之间互相平行。
10.根据本发明的另一种具体实施方式,第一上跳跃板、第二上跳跃板呈梯形状,第一下跳跃板、第二下跳跃板呈倒梯形状。
11.根据本发明的另一种具体实施方式,支撑板上设有向外凸出的支撑腿部,支撑腿部与第一下跳跃板、第二下跳跃板相对应。
12.根据本发明的另一种具体实施方式,安装板上设有一个或多个撑杆,撑杆用于限制第一上跳跃板、第二上跳跃板跨越水平位置形态而向下方内侧折叠。
13.根据本发明的另一种具体实施方式,支撑板上设有支撑座以及设置在支撑座上的支撑轴,第一下跳跃板转动连接在支撑轴上以提供第三铰链;撑杆的下端能与支撑轴相抵接以限制第一上跳跃板、第二上跳跃板跨越水平位置形态。
14.根据本发明的另一种具体实施方式,撑杆的下端形成有插口部,插口部能与支撑轴形成插接限位配合。
15.根据本发明的另一种具体实施方式,驱动装置至少包括sma驱动弹簧,sma弹簧沿水平方向设置并与该成对的一组主跳跃板或该成对的一组所述副跳跃板分别连接。
16.根据本发明的另一种具体实施方式,sma弹簧与第一铰链、第四铰链之间共面。
17.根据本发明的另一种具体实施方式,还包括用于进行倾倒后扶正的扶正装置,扶正装置设置在主跳跃板和/或副跳跃板处,其包括可产生转动的扶正腿;跳跃主体倾倒时,扶正腿能与支撑板所在地面相抵接,以通过扶正腿的转动将跳跃主体扶正。
18.根据本发明的另一种具体实施方式,扶正装置进一步包括传动连杆,传动连杆的一端设置在与扶正腿相同的主跳跃板或副跳跃板上,传动连杆的另一端铰接在扶正腿上,跳跃主体进行折叠时通过传动连杆驱动扶正腿转动以将跳跃主体扶正。
19.本发明具备以下有益效果:
20.本发明的跳跃主体采用成对的一组主跳跃板以及成对的一组副跳跃板形成完全对称结构,跳跃阶段地面的作用反力始终过质心的设计,有利于保持空中的姿态稳定性和落地时的姿态稳定性。同时,完全对称结构的跳跃主体更有利于进行扶正设计,便于跳跃机器人倾倒时的扶正操作,以实现跳跃主体的自主站立,从而能够进行连续的跳跃动作。
21.为了更清楚地说明本发明的目的、技术方案和优点,下面结合附图和具体实施方式对本发明作进一步的详细说明。
附图说明
22.图1是本发明实施例1跳跃机器人的整体结构示意图;
23.图2是本发明实施例1的侧面结构图;
24.图3是本发明实施例1中跳跃主体和扶正装置的结构图;
25.图4是图3的底部结构图;
26.图5是图3的局部示意图;
27.图6是本发明实施例1中单个跳跃支链和扶正装置的结构图;
28.图7是图6的侧面结构图;
29.图8是本发明实施例1中驱动装置的结构图;
30.图9是本发明实施例1中显示驱动器机构、轮系机构和牵引机构的结构图;
31.图10是本发明实施例1中显示主动啮合齿和棘爪的结构图;
32.图11是本发明实施例1中主动啮合齿、被动啮合齿和棘爪的工作原理示意图;
33.图12是本发明实施例1中驱动装置的另一种结构图;
34.图13是图12中显示驱动器机构、轮系机构和牵引机构的结构图;
35.图14是本发明实施例1前后方向所在剖面的机构简图。
具体实施方式
36.实施例1
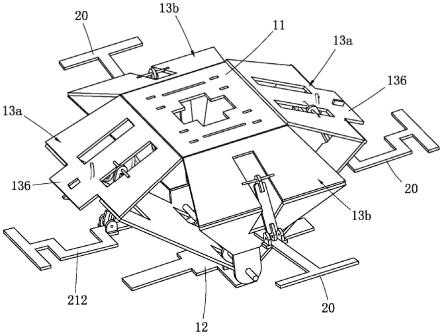
37.如图1所示,实施例1的微型跳跃机器人包括对称型的跳跃主体10、扶正装置20和驱动装置30。
38.如图2所示,跳跃主体10采用完全对称的九杆机构,以最大程度地保证经跳跃落地时的姿态稳定性,并且保证跳跃阶段地面的作用反力始终过质心,使得微型跳跃机器人在空中的姿态稳定;跳跃主体10包括安装板11、支撑板12和四条跳跃支链13,安装板11和支撑板12沿竖直方向间隔设置,四条跳跃支链13连接在所述安装板11和支撑板12之间以在高度方向上形成具有一定高度的空间跳跃结构体。
39.其中,四条跳跃支链13分别形成成对的一组主跳跃板13a以及成对的一组副跳跃板13b;每条跳跃支链13均包括可进行折展的上跳跃板13x和下跳跃板13y,上跳跃板13x和下跳跃板13y通过连接铰链互相铰接;多条跳跃支链13中的连接铰链相平齐。
40.如图3-5所示,成对的一组主跳跃板13a以及成对的一组副跳跃板13b的具体结构展开介绍如下:
41.该成对的一组主跳跃板13a对称设置在竖直方向的前后两侧,并在驱动装置30的驱动下可沿竖直方向进行折叠;其中,主跳跃板13a包括第一上跳跃板131和第一下跳跃板132,第一上跳跃板131和第一下跳跃板132通过第一铰链r1连接;第一上跳跃板131通过第二铰链r2与安装板11连接,第一下跳跃板132通过第三铰链r3与支撑板12连接;其中,第一铰链r1、第二铰链r2和第三铰链r3之间相互平行;
42.该成对的一组副跳跃板13b对称设置在竖直方向的左右两侧,并在驱动装置30的驱动下可沿竖直方向进行折叠;其中,副跳跃板13b包括第二上跳跃板133和第二下跳跃板134;第二上跳跃板133和第二下跳跃板134通过第四铰链r4连接,第一铰链r1与第四铰链r4之间互相垂直且共面;第二上跳跃板133通过第五铰链r5与安装板11连接;支撑板12上设有连接板121,第二下跳跃板134通过第六铰链r6与连接板121连接,第六铰链r6位于第三铰链r3的上方;其中,第四铰链r4、第五铰链r5和第六铰链r6之间互相平行。
43.本实施例中,第一上跳跃板131、第二上跳跃板133以及第一下跳跃板132、第二下跳跃板134的形状结构类似;为了更好地进行折展运动,第一上跳跃板131、第二上跳跃板133呈梯形状,第一下跳跃板132、第二下跳跃板134呈倒梯形状,以避免在折展运动中产生干涉现象。
44.为了形成更好地支撑,提高跳跃主体10在进行跳跃落地时的姿态稳定性,本实施例中的支撑板12采用与四条跳跃支链13相适配的结构形状;如图4所示,支撑板12上设有向外凸出的支撑腿部122,支撑腿部122与第一下跳跃板132、第二下跳跃板134相对应,例如支撑腿部122的数目为四个,四个支撑腿部122形成为十字形。
45.本实施例中,在跳跃主体10进行折叠时,多条跳跃支链13中的连接铰链(即第一铰链r1和第四铰链r4)始终位于安装板11的下方,即上跳跃板13x不会跨越水平位置形态而无法向下方内侧折叠;如图5所示,为了限制上跳跃板13x的折叠位置,安装板11上设置有一个或多个撑杆14,例如设置两个撑杆14。
46.具体的,支撑板12上设有用于与撑杆14相配合的限制部123,在支撑板12上设有支撑座124,在支撑座124上设有支撑轴125以提供该限制部123;相应的,第一下跳跃板132转
动连接在支撑轴125上以提供第三铰链r3;撑杆14的下端能与支撑轴125相抵接以限制第一上跳跃板131、第二上跳跃板133跨越水平位置形态。
47.请继续参阅图5,撑杆14的下端优选形成有插口部141,插口部141呈u形以能与支撑轴125形成插接限位配合;在插口部141与支撑轴125相抵时,此时跳跃主体10折叠至极限位置,即完成跳跃前的折叠以等待执行跳跃动作。如图14a所示,此时的上跳跃板13x处于水平位置形态并无法继续向下折叠,跳跃时上跳跃板13x和下跳跃板13y对向展开。
48.为了使得跳跃主体10在驱动装置30的驱动控制下能够产生连续的间歇跳跃,本实施例设置有扶正装置20,扶正装置20用于对倾倒时的跳跃主体10进行扶正,在每次跳跃动作完成后,无论跳跃主体10是否出现倾倒现象,均通过扶正装置20对跳跃主体10进行主动扶正操作,以使跳跃主体10在跳跃前始终保持支撑板12处于地面的竖直形态;请参阅图1-2和图6-7,扶正装置20包括扶正腿21和传动连杆22。
49.扶正腿21的一端铰接在下跳跃板13y上;传动连杆22的一端铰接在上跳跃板13x上,传动连杆22的另一端铰接在扶正腿21上;跳跃主体10倾倒时通过支撑板12的至少一处和扶正腿21的另一端支撑在地面上;
50.其中,在驱动装置30的驱动下,上跳跃板13x和下跳跃板13y对向折叠,并通过传动连杆22驱动扶正腿21相较于下跳跃板13y产生转动,以扶正支撑板12,如图14c-14d所示。
51.请再次参阅图6,上跳跃板13x和下跳跃板13y对应传动连杆22设有避让槽135,以便于进行传动连杆22的安装和转动时不会产生干涉;
52.进一步地,扶正腿21的另一端(远离下跳跃板13y的一端)形成有防倾部211,防倾部211至少具有朝向扶正腿21的一侧凸伸出的支撑部2111;优选的,扶正腿21和支撑部2111形成为t形支撑结构或l形支撑结构,以在跳跃主体10倾斜时,扶正腿21能够更好的支撑跳跃主体10,并且在扶正腿21转动时,防倾部211与地面的接触面积大,提高了扶正过程的稳定性。再优选的,支撑部2111能与地面接触的距离,设置为不小于下跳跃板13y最大宽度的三分之一。
53.请继续参阅图14c-14d,本实施例中扶正装置20中的传动连杆22和扶正腿21形成类似于曲柄滑块的驱动结构,利用互相铰接的上跳跃板13x和下跳跃板13y所进行的对向折叠动作,实现扶正腿21的自主转动;当支撑板12发生倾倒时,扶正腿21的另一端与地面产生抵接滑动配合,转动的扶正腿21作用在地面上以主动将支撑板12扶正并恢复至正常姿态;扶正装置20无需设置额外的、单独的驱动器,极大减轻了机器人的重量,有利于推广应用。
54.驱动装置30用于驱动跳跃主体10进行折叠和展开(跳跃),同时通过扶正装置20产生协同扶正以实现跳跃主体10产生连续的间歇跳跃;本实施例中一种具体的驱动装置30的结构形式如图1-2和图8-9所示,驱动装置30包括载座31、牵引机构32、轮系机构33、驱动器机构34以及储能机构35。
55.其中,载座31安装在安装板11上或形成为安装板11的一部分,优选的,在载座31上设有框架311以对安装在载座31上的零部件进行防护,以使得结构更加稳固和牢靠。
56.请继续参阅图8,驱动器机构34包括电机341、传动组件342、传动丝杆343和棘爪344;
57.电机341优选为微型减速电机,其安装在载座31上,传动丝杆343设置在载座31上并通过传动组件342与电机341进行驱动连接;传动组件342可以为齿轮传动组件、带传动组
件和蜗轮蜗杆传动组件,本实施例中以齿轮传动组件为例进行展示;棘爪344安装在载座31上,并位于传动丝杆343的一侧。
58.如图9所示,牵引机构32包括牵引线、绕线杆321和支架322;
59.绕线杆321通过支架322可转动地设置在载座31上,牵引线缠绕在绕线杆321上,牵引线与跳跃主体10相连接以能够在缩短时使得跳跃主体10产生跳跃前的折叠;其中,牵引线优选具有较高的强度,例如细钢丝,在缠绕和释放等各阶段牵引线均不易产生弹性形变。
60.具体的,载座31(和安装板11)上设有穿孔312,牵引线的下端穿过该穿孔312向下伸出并连接跳跃主体10上,具体连接在支撑板12或者支撑轴125上,以通过牵引线的转动缩短安装板11与支撑板12之间的距离,从而驱使跳跃主体10进行折叠。
61.轮系机构33包括主动啮合齿331和被动啮合齿332;
62.主动啮合齿331设置在传动丝杆343上,棘爪344对主动啮合齿331在转动过程的部分阶段进行阻碍,以使得主动啮合齿331产生设定距离的移动;被动啮合齿332设置在绕线杆321上;
63.如图2所示,储能机构35包括用于驱动跳跃主体10产生跳跃动作的sma弹簧351;其中,上跳跃板13x或下跳跃板13y上设有用于与sma弹簧351连接的连接座136,以使得sma弹簧351以平行于支撑板12和安装板11的方式进行安装;具体的,sma弹簧351优选与第一铰链r1、第四铰链r4之间共面。
64.进一步地,sma弹簧351沿水平方向设置并与该成对的一组主跳跃板13a分别连接;如图3所示,与该成对的一组主跳跃板13a相对的扶正腿21上设有用于避让连接座136的折弯部212,以对连接座136形成避让。
65.本实施例中,传动丝杆343正向转动时,在棘爪344的阻碍作用下,主动啮合齿331能相对传动丝杆343产生设定距离的移动,以使得主动啮合齿331能与被动啮合齿332相啮合;传动丝杆343的继续转动驱动主动啮合齿331、被动啮合齿332转动,以带动绕线杆321转动并通过牵引线驱动跳跃主体10产生跳跃前的折叠并保持折叠形态。跳跃时,对sma弹簧351进行通电,此时基于电机341和棘爪344的作用,跳跃主体10被锁定状态而无法产生跳跃动作;通过电机341驱动传动丝杆343反向转动以解除跳跃主体10的锁定状态,在传动丝杆343的反转过程中,主动啮合齿331与被动啮合齿332相互脱离,缠绕在绕线杆321上的牵引绳被释放;此时,失去约束的sma弹簧发生缩短,以驱动跳跃主体10产生跳跃动作。
66.本实施例棘爪344的一种具体设置结构如下:
67.棘爪344上设有弹性部345,以使得棘爪344被挤压时能产生具有反转回复力矩的转动,这里棘爪344所产生的转动是在主动啮合齿331挤压作用下产生较小范围内的转动;在轴向方向上,至少部分棘爪344与主动啮合齿331相重叠,传动丝杆343正向转动时,主动啮合齿331与棘爪344相抵以使棘爪344转动;此时,在弹性部345的作用下棘爪344压紧在主动啮合齿331上,以使得主动啮合齿331在传动丝杆343上产生靠近被动啮合齿332的移动,直至主动啮合齿331与被动啮合齿332相抵接;之后,主动啮合齿331开始转动,以驱动被动啮合齿332带动绕线杆321转动,并通过牵引线驱动跳跃主体10产生跳跃前的折叠并将跳跃主体10保持折叠形态。
68.其中,主动啮合齿331上设有槽部3311;传动丝杆343反向转动时,棘爪344能与槽部3311的壁相抵,以使得主动啮合齿331在传动丝杆343上产生远离被动啮合齿332的移动。
69.进一步地,如图10所示,棘爪344具有第一端部3441、第二端部3442以及位于第一端部3441和第二端部3442之间的主体部3443;第一端部3441与载座31连接,弹性部345设置在第一端部3441处;传动丝杆343正向转动时,主动啮合齿331与主体部3443相抵并克服弹性部345的作用力以使棘爪344转动;传动丝杆343反向转动时,主动啮合齿331上的槽部3311的壁与第二端部3442相抵以限制主动啮合齿331的转动。
70.具体的,主动啮合齿331呈圆柱状,其包括柱形主体3312以及一个或多个主动啮合齿部3313,例如在柱形主体3312上设有两个主动啮合齿部3313,主动啮合齿部3313凸伸出柱形主体3312靠近被动啮合齿332的端面;槽部3311形成在柱形主体3312的外周,可以理解的是,槽部3311可以具有多个连通或者不连通的空间,也可以包括上述两个主动啮合齿部3313之间的空间。
71.被动啮合齿332呈圆柱状,其包括回转体3321以及设置在回转体3321上的一个或多个被动啮合齿部3322,被动啮合齿部3322的数目与主动啮合齿部3313的数目相同;其中,主动啮合齿部3313在正转时能与被动啮合齿部3322相啮合,主动啮合齿部3313在反转时能与被动啮合齿部3322相脱离。
72.如图11所示,驱动装置30中轮系机构33的配合过程如下:
73.传动丝杆343正向转动,在主动啮合齿331未与棘爪344形成压紧配合之前(即主动啮合齿331正向转动并未与棘爪344接触),主动啮合齿331随着传动丝杆343进行同步转动,如图11a-11b所示;
74.在主动啮合齿331的外周壁与棘爪344接触并向外挤压棘爪344时,基于弹性部345的存在,棘爪344向外转动并向主动啮合齿331提供有压紧力f,如图11c所示;
75.在该压紧力f的作用下,主动啮合齿331克服其与传动丝杆343的摩擦并形成相对转动,此时主动啮合齿331与棘爪344在周向上形成相对固定效果,主动啮合齿331在传动丝杆343的继续转动下产生向右移动,直至与被动啮合齿332相抵接,如图11d所示;
76.主动啮合齿331与被动啮合齿332相抵接后,无法继续向右前进;此时,主动啮合齿331和被动啮合齿332之间的正压力逐渐增大,主动啮合齿331与传动丝杆343之间的摩擦作用增强;当正压力继续增大至超过压紧力f的压紧作用时,传动丝杆343会带动主动啮合齿331进行转动,转动的主动啮合齿331能带动被动啮合齿332进行转动,如图11e所示;
77.其中,转动的主动啮合齿331带动被动啮合齿332进行转动的方式可以是二者直接啮合所形成的转动,也可以通过主动啮合齿331和被动啮合齿332因抵接所产生摩擦力所导致的相对转动,只要能够实现被动啮合齿332的转动即可;也就说是,当牵引绳的拉力并未超过主动啮合齿331和被动啮合齿332因抵接所产生摩擦力时,主动啮合齿331和被动啮合齿332不啮合依旧可以形成同步转动;当牵引绳的拉力超过主动啮合齿331和被动啮合齿332因抵接所产生摩擦力时,则主动啮合齿331和被动啮合齿332将发生相对转动,导致啮合。
78.被动啮合齿332会带动与其相连的绕线杆321的转动,并通过绕线杆321进行牵引线的缠绕,基于牵引线的下端与跳跃主体10相连接(具体是支撑板12或者支撑轴125),可以通过牵引线的转动缩短安装板11与支撑板12之间的距离,从而驱使跳跃主体10进行折叠,直至撑杆14上的插口部141与支撑轴125相抵接配合,如图11f所示;此时,跳跃主体10处于跳跃前的锁定状态,sma弹簧351被拉长并储能。同时,上述过程同步通过扶正装置20进行了
对跳跃主体10的扶正操作。
79.接着对sma弹簧351进行通电以准备进行跳跃主体10的释放;此时基于电机341和棘爪344的协同作用,跳跃主体10无法被释放;通过控制电机341反转,即传动丝杆343反转,进行主动啮合齿331与被动啮合齿332的互相脱离,如图11g-11i所示;在主动啮合齿331与被动啮合齿332的相脱离之后,sma弹簧351便发生缩短,进而驱动跳跃主体10产生跳跃动作,跳跃过程如图14a-14b所示。
80.展开来说,反转的主动啮合齿331上的槽部3311的壁将与棘爪344(具体是棘爪344的第二端部3442)相抵,以使得主动啮合齿331在传动丝杆343上产生远离被动啮合齿332的移动;同时,跳跃后的跳跃主体10中支撑板12和安装板11的距离增大,被动啮合齿332收到牵引线的拉力产生反转,缠绕在绕线杆321上的牵引线可以自由释放。
81.作为本实施的一种延伸,如图12-13所示,主动啮合齿331上设有主动咬合齿部3314,被动啮合齿332上设有与主动咬合齿部3314相适配的被动咬合齿部3323,主动咬合齿部3314和被动咬合齿部3323中的至少一处设置为能产生弹性变形以使得二者瞬间脱离。
82.相应的,为了促进主动咬合齿部3314和被动咬合齿部3323的瞬间脱离,牵引机构32还可以包括产生脱离作用力的弹簧323;请再次参阅图12,支架322上设有支撑孔部3221,绕线杆321设置在支撑孔部3221内并能够相对支架322进行转动和移动;具体的,绕线杆321的一端部(右端)设有限位端盖3211,弹簧323套设在绕线杆321上,且弹簧323的两端分别抵接限位端盖3211与支架322;在绕线杆321向左移动时能够通过限位端盖3211压缩该弹簧323。
83.请再次参阅图13,主动咬合齿部3314和被动咬合齿部3323之间形成钩状互扣配合,例如主动咬合齿部3314和被动咬合齿部3323均可产生轴向上的弹性变形;具体的,在主动啮合齿331和被动啮合齿332进行围绕轴向的转动时,即使主动咬合齿部3314和被动咬合齿部3323产生相对挤压,也不会影响主动啮合齿331和被动啮合齿332的转动;在电机341反转释放时,主动啮合齿331和被动啮合齿332之间的摩擦力必然减小,无论前述过程中,主动啮合齿331和被动啮合齿332是否处于完全啮合状态,在牵引绳的拉力作用下必然使得被动啮合齿332和主动啮合齿331处于完全啮合状态;由于棘爪344的存在,主动啮合齿331只进行轴向移动;因绕线杆321可移动,此时在主动咬合齿部3314和被动咬合齿部3323未脱离的情况下,被动啮合齿332以及绕线杆321随着主动啮合齿331产生移动,并压缩弹簧323;在主动啮合齿331进行轴向移动超过一定距离时,弹簧323的作用力增大至超过主动咬合齿部3314和被动咬合齿部3323的承受能力,这时主动咬合齿部3314和被动咬合齿部3323产生弹性形变,使得主动啮合齿331和被动啮合齿332瞬间脱离;在弹簧323的作用下,被动啮合齿332以及绕线杆321朝向远离主动啮合齿331的方向移动,并且在sma弹簧351的作用下缠绕在绕线杆321上的牵引线被迅速释放,从而实现了跳跃主体10的快速释放。
84.如图14所示,本实施例的微型跳跃机器人单周期的跳跃过程如下:
85.跳跃主体10处于折叠状态,对sma弹簧351进行通电,基于电机341和棘爪344的协同作用,主动啮合齿331和被动啮合齿332相啮合并被锁定在当前位置,跳跃主体10还无法产生跳跃动作,如图14a所示;
86.通过电机341反转以驱动传动丝杆343反转,主动啮合齿331和被动啮合齿332相脱离,绕线杆321失去约束,可以释放牵引线;sma弹簧351发生缩短以驱动跳跃主体10产生跳
跃动作,如图14b所示;其中,通过sma弹簧351缩短后的位置控制跳跃主体10展开后的位置;在其他实施例中,可以设置限位机构以限制跳跃支链13所能展开的最大位置。
87.跳跃落地时,电机341正转以驱动传动丝杆343正转,主动啮合齿331将与被动啮合齿332相啮合,通过绕线杆321、牵引线驱动跳跃主体10产生折叠以恢复至跳跃前的折叠姿态,如图14d所示,此时跳跃主体10的折叠过程同时拉长sma弹簧以进行储能;如果跳跃主体10发生倾倒,如图14c所示,则扶正装置20中的扶正腿21将与地面相抵以形成支撑,在跳跃主体10折叠过程中,转动的扶正腿21作用在地面上以主动将支撑板12扶正并恢复至正常姿态,如图14d所示;单周期跳跃完成,跳跃主体10恢复至跳跃前的折叠状态。
88.虽然本发明以具体实施例揭露如上,但这些具体实施例并非用以限定本发明实施的范围。任何本领域的普通技术人员,在不脱离本发明的发明范围内,当可作些许的变化/修改,即凡是依照本发明所做的同等变化/修改,应为本发明的保护范围所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1