小型自主可变形模块化机器人
1.本实用新型涉及机器人领域,具体涉及一种小型自主可变形模块化机器人。
背景技术:
2.随着社会的发展,机器人技术的成熟,机器人已经不只被期望用于工业环境中进行劳动生产,在其他方面如军事、水下探测、空间探测、抢险救灾、核工业等领域都需要能够在非结构化环境下完成作业任务的机器人。因此对能够在非结构化环境下积极适应并灵活移动的“特种机器人”的研究越来越受到各个国家的一致重视。
3.为了适应复杂地形的探测任务,申请人在公开号为cn212887615u的实用新型专利中公开了一种自主分离式可重构模块化机器人,该机器人能够进行蜿蜒行进,同时该机器人在部分节段被压迫后,可自主完成分离;然而该机器人的行进方式效率较低,难以应对复杂的非结构化环境;现有技术中的移动机器人的移动机构主要分为四类:轮式、腿式、履带式、复合式(如轮腿式、轮履式等)。任何一种移动机构在特定的环境中都具有其独特的优势,但也存在一些自身无法克服的不足和缺陷。相比较之下,复合式移动机器人较只具有单一类型移动机构的机器人具有更好的环境适应性。
4.基于此,本技术的目的是设计了一种小型自主可变形模块化机器人。突破了国内外现有侦检机器人结构设计,机器人可开展地质探测、灾后搜救等作业任务,可实现侦检信息、搜救信息的实时传输,具备较强复杂地形通过能力。在特殊救援任务中,可代替侦检搜救人员先行检测环境信息,反馈场景环境信息,具有巨大的市场潜力。
技术实现要素:
5.本实用新型的小型自主可变形模块化机器人,包括若干机器人模块和柔性脊柱;所述机器人模块底部设有轮足复合机构;所述柔性脊柱连接于相邻机器人模块之间形成链式结构;位于机器人两端的机器人模块为可自主分离模块,其通过分离可控的磁性接口与柔性脊柱连接;位于机器人中部的机器人模块为不可自主分离模块,其两端通过机械接口与柔性脊柱固定连接;
6.所述柔性脊柱包括柔性结构体、连接体和变形驱动装置;所述变形驱动装置包括同轴固定于柔性结构体一端的刚性外壳、设置于刚性外壳内的并沿圆周方向均布的若干绕线轮和用于驱动绕线轮转动的变形驱动电机;所述绕线轮通过轴承安装在刚性外壳内,牵引绳一端连接在绕线轮,另一端连接柔性结构体另一端;
7.所述轮足复合机构包括车轮、足式腿、行进驱动电机、行进驱动舵机和足式腿舵机;所述车轮和足式腿均以可转动的方式设置于机器人模块底部;所述行进驱动电机和行进驱动舵机分别用于驱动车轮和足式腿转动;所述足式腿舵机用于驱动足式腿伸出或收回以切换机器人以轮式或腿式行进;
8.进一步,所述变形驱动装置的刚性外壳包括同轴固定的圆柱形壳体和锥台形壳体;所述变形驱动电机安装于圆柱形壳体内,所述绕线轮通过轴承安装在锥台形壳体内,所
述变形驱动电机通过锥齿轮副ⅰ驱动绕线轮转动;所述牵引绳通过开设于锥台形壳体表面的窗口伸出;所述柔性结构体外套有若干导向套,所述导向套沿圆周方向分布有若干供牵引绳穿过的导向孔;
9.进一步,所述机械接口包括设置于柔性脊柱端部的连接体上的连接扣、设置于不可自主分离模块端部用于与连接扣配合的插槽和用于断开二者连接作用的断开按钮;
10.进一步,所述轮足复合机构通过u型板安装于机器人模块底部;所述u型板安装有可摆动的腿部壳体和用于驱动腿部壳体摆动的行进驱动舵机;所述车轮、行进驱动电机和足式腿舵机安装于腿部壳体,且行进驱动电机通过锥齿轮副ⅱ驱动车轮转动。
11.本实用新型的有益效果:本实用新型的小型自主可变形模块化机器人,通过柔性脊柱的伸直或弯曲,可自主变形为“长方体”(机器人整体弯曲为u形)和“直线形”,在平坦地面上时,机器人采用“长方体”式结构通过轮式结构滑动前行;在遇到较小障碍物时,机器人变形为“直线形”,通过足式结构步行穿过障碍物;在极为狭窄空间时,位于机器人两端的机器人模块可自主分离,单独执行作业任务。本机器人通过控制足式腿的动作可以使机器人实现“步行”、“滚动”、“跳跃”、“跑动”等运动方式,在救援环境中,可代替侦检搜救人员先行检测环境信息,一方面可反馈场景环境信息,另一方面可开展搜救作业,助力促进特种场景下作业自动化,提升信息探测效率,具有巨大的市场潜力。
附图说明
12.下面结合附图和实施例对本实用新型作进一步描述:
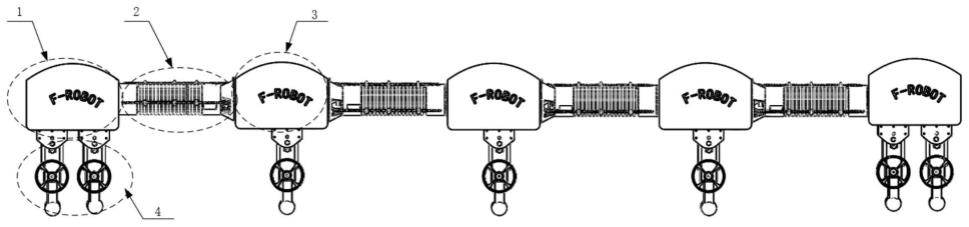
13.图1为本实用新型的小型自主可变形模块化机器人的整体结构示意图;
14.图2为本实用新型的可自主分离模块的结构示意图;
15.图3为本实用新型的柔性脊柱的结构示意图;
16.图4为本实用新型的变形驱动装置的结构示意图;
17.图5为本实用新型的变形驱动装置的内部结构示意图;
18.图6为本实用新型的柔性结构体的结构示意图;
19.图7为本实用新型的机械接口的示意图;
20.图8为本实用新型的磁性结构的示意图;
21.图9为本实用新型的不可自主分离模块的示意图;
22.图10为本实用新型的轮足复合结构的示意图;
23.图11为本实用新型的轮足复合结构内部示意图。
具体实施方式
24.如图1所示,本实施例的一种小型自主可变形模块化机器人,包括五个机器人模块和四段柔性脊柱2;所述机器人模块底部设有轮足复合机构4;所述柔性脊柱2连接于相邻机器人模块之间形成链式结构;位于机器人两端的机器人模块为可自主分离模块1,其通过分离可控的磁性接口与柔性脊柱2连接,其底部设有两对轮足复合机构4;位于机器人中部的机器人模块为不可自主分离模块3,其两端通过机械接口与柔性脊柱2固定连接,其底部设有一对轮足复合机构4。
25.如图2所示,位于机器人首尾的可自主分离模块1包括机身和分布在机身1-1端部
的四个磁性接口1-2;如图8所示,柔性脊柱2端部的连接体端面上也对应分布有四个磁性接口2-3-4与机身连接,磁性接口可采用现有电磁铁等结构,实现连接与分离可控。
26.如图3所示,所述柔性脊柱2包括柔性结构体2-2、分设在柔性结构体2-2两端的连接体和变形驱动装置2-1;所述变形驱动装置2-1包括同轴固定于柔性结构体2-2一端的刚性外壳、设置于刚性外壳内的并沿圆周方向均布的若干绕线轮2-1-7和用于驱动绕线轮2-1-7转动的变形驱动电机2-1-6;如图4,所述变形驱动装置2-1的刚性外壳包括同轴固定的圆柱形壳体2-1-1和锥台形壳体2-1-2,锥台形壳体2-1-2外端直接通过紧固件与机器人模块固定连接;所述变形驱动电机2-1-6安装于圆柱形壳体2-1-1内,所述绕线轮2-1-7通过轴承2-1-3安装在锥台形壳体2-1-2内,所述变形驱动电机2-1-6通过锥齿轮副ⅰ(包括主动锥齿轮2-1-5和从动锥齿轮2-1-4)驱动绕线轮2-1-7转动;所述牵引绳2-3-1通过开设于锥台形壳体2-1-2表面的窗口伸出;所述柔性结构体2-2外套有若干导向套2-2-2,所述导向套2-2-2沿圆周方向分布有若干供牵引绳2-3-1穿过的导向孔;所述连接体固定在柔性结构体2-2端部,其通过机械接口或磁性接口与机器人模块连接;如图7所示,所述机械接口包括设置于柔性脊柱2端部的连接体上的连接扣2-3-3、设置于不可自主分离模块3端部用于与连接扣配合的插槽3-2和用于断开二者连接作用的断开按钮3-2。
27.如图10,所述轮足复合机构4包括车轮4-4、足式腿4-5、行进驱动电机4-6、行进驱动舵机4-2和足式腿舵机4-10;所述轮足复合机构4通过u型板4-1安装于机器人模块底部;所述u型板4-1安装有可摆动的腿部壳体4-3和用于驱动腿部壳体4-3摆动的行进驱动舵机4-2;所述车轮4-4、行进驱动电机4-6和足式腿舵机4-10安装于腿部壳体4-3,且行进驱动电机4-6通过锥齿轮副ⅱ(包括主动锥齿轮4-8和从动锥齿轮4-9)驱动车轮4-4转动;所述腿部壳体4-3底部通过l形板4-7固定安装有足式腿舵机4-10,足式腿舵机4-10的转轴上安装有足式腿4-5;所述行进驱动电机4-6和行进驱动舵机分别用于驱动车轮4-4和足式腿4-5转动;所述足式腿舵机4-10用于驱动足式腿4-5伸出或收回以切换机器人以轮式或腿式行进。
28.以上仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化;凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1