转向控制方法、装置和车辆与流程
本公开涉及工程机械设备,特别涉及一种转向控制方法、装置和车辆。
背景技术:
1、常规的车辆大多采用方向盘与梯形连杆机构实现转向控制。其中,方向盘用于带动转向拉杆实现车辆转向,梯形连杆机构用于保证转向过程中内外轮的转角关系,以在转向时尽量使全部车轮绕同一个瞬时转向中心做圆周运动,进而保证转向轮不发生滑移,减少轮胎的磨损。
2、由于高空作业平台车的驾驶位置距离车轮较远,而且,高空作业平台车工作时臂架、车桥还需要进行伸缩动作,因此,常规的方向盘与梯形连杆机构的转向控制模式不适合在此类车辆上应用。
技术实现思路
1、本公开提供了一种转向控制方法、装置和车辆。
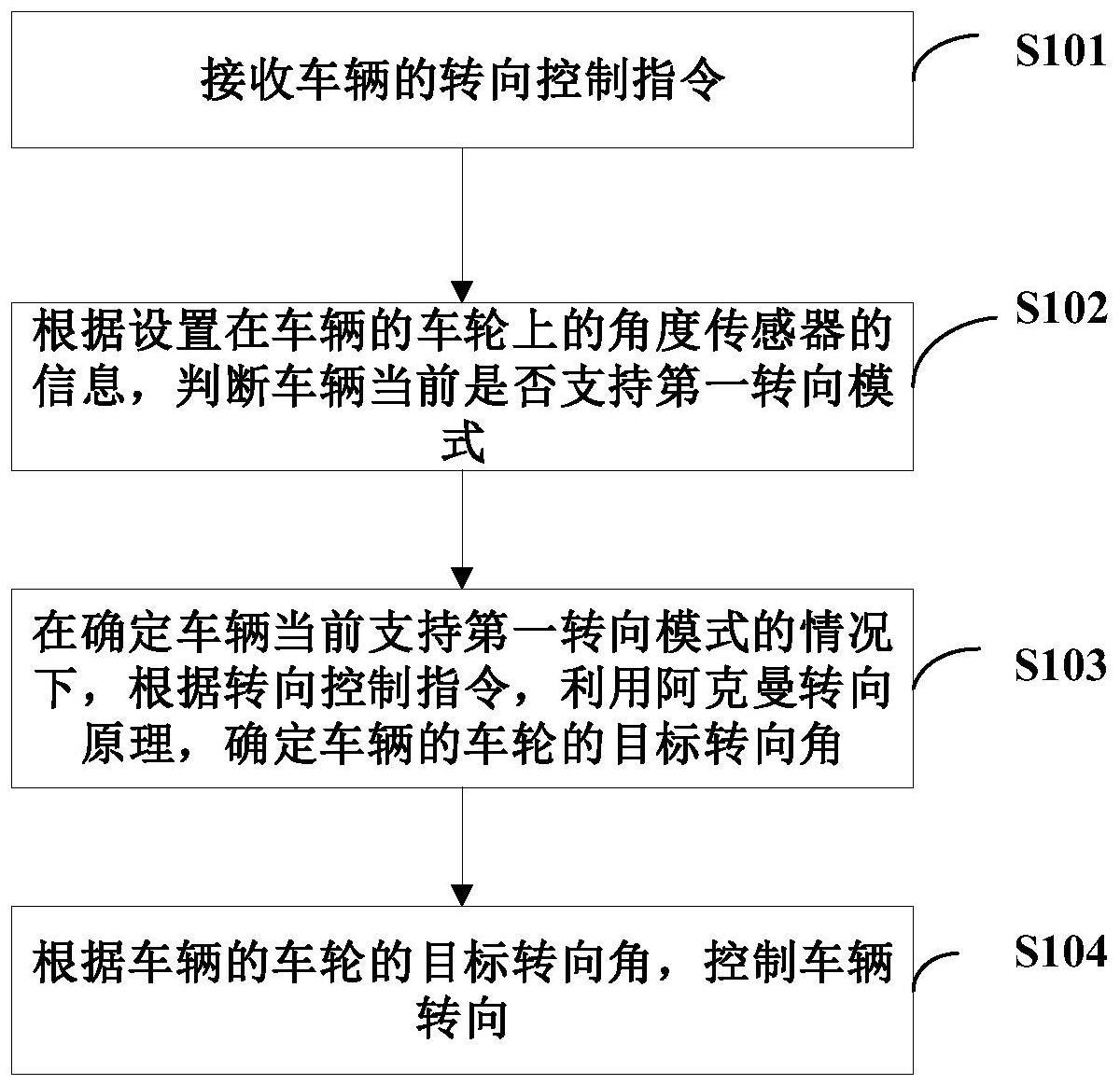
2、根据本公开的第一方面,提出了一种转向控制方法,包括:接收车辆的转向控制指令,所述转向控制指令包括第一转向模式和目标转向方向;根据设置在所述车辆的车轮上的角度传感器的信息,判断所述车辆当前是否支持所述第一转向模式;在确定所述车辆当前支持所述第一转向模式的情况下,根据所述转向控制指令,利用阿克曼转向原理,确定所述车辆的车轮的目标转向角;根据所述车辆的车轮的目标转向角,控制所述车辆转向。
3、在一些实施例中,所述根据设置在所述车辆的车轮上的、角度传感器的信息,判断所述车辆当前是否支持所述第一转向模式包括:在所述角度传感器的信息表明,与所述第一转向模式对应的车轮上的角度传感器不存在故障的情况下,确定所述车辆当前支持所述第一转向模式;在所述角度传感器的信息表明,与所述第一转向模式对应的车轮上的角度传感器存在故障的情况下,确定所述车辆当前不支持所述第一转向模式。
4、在一些实施例中,转向控制方法还包括:在确定所述车辆当前不支持所述第一转向模式、但支持第二转向模式的情况下,根据所述第二转向模式控制所述车辆转向。
5、在一些实施例中,所述第一转向模式为前轮转向模式,所述第二转向模式为后轮转向模式;或者,所述第一转向模式为后轮转向模式,所述第二转向模式为前轮转向模式。
6、在一些实施例中,转向控制方法还包括:在确定所述车辆当前不支持所述第一转向模式的情况下,输出转向控制失败提示信息。
7、在一些实施例中,转向控制方法还包括:在所述根据所述转向控制指令,利用阿克曼转向原理,确定所述车辆的车轮的目标转向角之前,确定所述车辆当前的姿态角位于安全角度范围。
8、在一些实施例中,转向控制方法还包括:在确定所述车辆当前的姿态角不在所述安全角度范围的情况下,输出转向控制失败提示信息。
9、在一些实施例中,所述根据所述车辆的车轮的目标转向角,控制所述车辆转向包括:采集所述车辆转向过程中、同一车桥上的车轮的转向角度;在所述同一车桥上的车轮的转向角度之间的差值不在偏差阈值区间的情况下,对所述同一车桥上的车轮的转速进行调整,以得到调整后的转速;根据所述车辆的车轮的目标转向角、以及所述调整后的转速,控制所述车辆转向。
10、在一些实施例中,所述根据所述转向控制指令,利用阿克曼转向原理,确定所述车辆的车轮的目标转向角包括:根据所述转向控制指令,从所述车辆的车轮中确定目标轮、跟随轮和所述目标轮的目标转向角,所述跟随轮为所述第一转向模式下跟随所述目标轮转动的车轮;根据所述目标轮的目标转向角,利用阿克曼转向原理,确定所述跟随轮的目标转向角。
11、在一些实施例中,所述根据所述目标轮的目标转向角,利用阿克曼转向原理,确定所述跟随轮的目标转向角包括:根据所述目标轮的目标转向角、以及所述车辆的车桥的状态,利用阿克曼转向原理,确定所述跟随轮的目标转向角,所述车桥的状态包括伸缩状态或扩展状态。
12、根据本公开的第二方面,提出了一种转向控制装置,包括:接收模块,被配置为接收车辆的转向控制指令,所述转向控制指令包括第一转向模式和目标转向方向;判断模块,被配置为根据设置在所述车辆的车轮上的、角度传感器的信息,判断所述车辆当前是否支持所述第一转向模式;确定模块,被配置为在确定所述车辆当前支持所述第一转向模式的情况下,根据所述转向控制指令,利用阿克曼转向原理,确定所述车辆的车轮的目标转向角;控制模块,被配置为根据所述车辆的车轮的目标转向角,控制所述车辆转向。
13、根据本公开的第三方面,提出了一种转向控制装置,包括:存储器;以及耦接至所述存储器的处理器,所述处理器被配置为基于存储在所述存储器的指令执行如前所述的转向控制方法。
14、根据本公开的第四方面,提出了一种车辆,包括:如前所述的转向控制装置;转向执行结构,被配置为在所述转向控制装置的控制下,执行转向。
15、在一些实施例中,车辆还包括:角度传感器,被配置为采集所述车辆的车轮的转向角;位姿传感器,被配置为采集所述车辆的姿态角。
16、在一些实施例中,所述车辆为高空作业平台车。
17、根据本公开的第五方面,提出了一种计算机可读存储介质,其上存储有计算机程序指令,该指令被处理器执行时实现如前所述的转向控制方法。
18、通过以下参照附图对本公开的示例性实施例的详细描述,本公开的其它特征及其优点将会变得清楚。
技术特征:
1.一种转向控制方法,包括:
2.根据权利要求1所述的转向控制方法,其中,所述根据设置在所述车辆的车轮上的、角度传感器的信息,判断所述车辆当前是否支持所述第一转向模式包括:
3.根据权利要求1所述的转向控制方法,还包括:
4.根据权利要求3所述的转向控制方法,其中:
5.根据权利要求3所述的转向控制方法,还包括:
6.根据权利要求1所述的转向控制方法,还包括:
7.根据权利要求6所述的转向控制方法,还包括:
8.根据权利要求1所述的转向控制方法,其中,所述根据所述车辆的车轮的目标转向角,控制所述车辆转向包括:
9.根据权利要求1所述的转向控制方法,其中,所述根据所述转向控制指令,利用阿克曼转向原理,确定所述车辆的车轮的目标转向角包括:
10.根据权利要求9所述的转向控制方法,其中,所述根据所述目标轮的目标转向角,利用阿克曼转向原理,确定所述跟随轮的目标转向角包括:
11.一种转向控制装置,包括:
12.一种转向控制装置,包括:
13.一种车辆,包括:
14.根据权利要求13所述的车辆,还包括:
15.根据权利要求13或14所述的车辆,其中,所述车辆为高空作业平台车。
16.一种计算机可读存储介质,其上存储有计算机程序指令,该指令被处理器执行时实现权利要求1至10任一所述的转向控制方法。
技术总结
本公开提出了一种转向控制方法、装置和车辆,涉及工程机械设备技术领域。其中,转向控制方法包括:接收车辆的转向控制指令,所述转向控制指令包括第一转向模式和目标转向方向;根据设置在所述车辆的车轮上的角度传感器的信息,判断所述车辆当前是否支持所述第一转向模式;在确定所述车辆当前支持所述第一转向模式的情况下,根据所述转向控制指令,利用阿克曼转向原理,确定所述车辆的车轮的目标转向角;根据所述车辆的车轮的目标转向角,控制所述车辆转向。通过以上方法,能够提高车辆进行转向控制的安全性、可靠性和稳定性。
技术研发人员:俞宗嘉,靳翠军,王晓飞,刘振远,刘静
受保护的技术使用者:徐工消防安全装备有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!