一种模块化多模式张拉移动机器人
本发明属于移动机器人,具体涉及一种模块化多模式张拉移动机器人。
背景技术:
1、移动机器人可用于野外探索、抢险救灾、军事侦察等非结构化环境,可代替人类完成极端环境下的任务,是国内外学者关注的问题之一。非结构化环境要求机器人对地形有更强的适应能力,相比于传统的移动机器人,多运动模式机器人有更强的地形适应能力,因此,研制运动模式多,地形适应能力强的移动机器人成为当前研究热点。
2、在多运动模式机器人的研究方面,目前已取得一些成果。中国专利cn112277551a公开一种可变结构多模式移动机器人,该专利基于可变结构使机器人实现飞行、地面行走、地面滚动及飞爬结合等四种运动模式,适合在地形复杂的环境条件下作业,对复杂地形适应性优越,但是对比简单的非结构化环境,机器人利用较少的运动模式即可完成既定需求,其他运动模式是冗余的,对比较简单的非结构化环境多模式移动机器人结构与控制系统复杂。
3、为解决上述多模式移动机器人的不足,亟需设计一种可以根据地形需求改变机器人的机构复杂程度,并且控制简单的机械移动机器人。
技术实现思路
1、本发明为解决现有技术存在的问题而提出,其目的是提供一种模块化多模式张拉移动机器人。
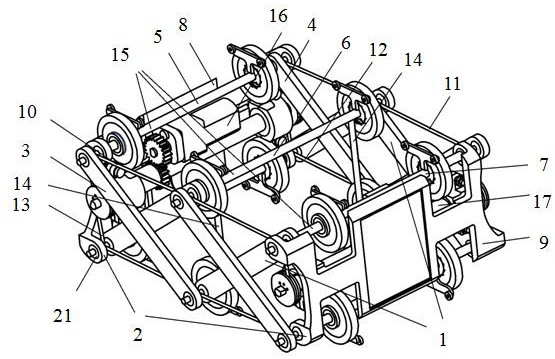
2、本发明的技术方案是:一种模块化多模式张拉移动机器人,包括多个移动单元,所述移动单元包括左右两侧对称布设的左刚性系杆、右刚性系杆,所述左刚性系杆、右刚性系杆之间设置有位于前侧的前驱动机架、位于后侧的后驱动机架,所述左刚性系杆、右刚性系杆之间设置有上下双排单向轮足组,所述单向轮足组紧贴地面行走,所述左刚性系杆、右刚性系杆中还设置有进行杆系调节的滑移索组。
3、更进一步的,所述前驱动机架中设置有上下双排的前部单向轮足组,所述前部单向轮足组左右两侧同时与左刚性系杆、右刚性系杆的前端相连。
4、更进一步的,所述后驱动机架中设置有上下双排的后部单向轮足组,所述后部单向轮足组左右两侧同时与左刚性系杆、右刚性系杆的后端相连。
5、更进一步的,所述左刚性系杆、右刚性系杆均包括四根刚性杆,所述刚性杆两两一组呈交叉状布设,两组刚性杆相连处形成中间关节。
6、更进一步的,所述中间关节处设置有上下双排的中部单向轮足组。
7、更进一步的,所述两组中部单向轮足组之间设置有弹性索。
8、更进一步的,所述前驱动机架、后驱动机架中设置有便于多个移动单元拼装的磁吸组件。
9、更进一步的,所述前驱动机架中设置有转动的中心轴,所述中心轴两侧分别与一号绕线盘、二号绕线盘相连,一号绕线盘、二号绕线盘中设置有对下排单向轮足组进行驱动的下排滑移索。
10、更进一步的,所述后驱动机架中设置有同步转动的三号绕线盘、四号绕线盘,所述三号绕线盘、四号绕线盘中设置有对上排单向轮足组进行驱动的上排滑移索。
11、更进一步的,所述单向轮足组中设置有进行地面行走的内轮足、外轮足。
12、本发明的有益效果如下:
13、本发明公开了一种模块化多模式张拉移动机器人,单个移动单元通过前驱动装置、后驱动装置控制上下两排滑移索的索长使连杆架产生运动,连杆架与滑移索的组合使移动单元形成蠕动与尺蠖运动形式,不同数量的移动单元通过吸附装置与对接装置连接,连接后的机器人通过运动形式的组合可实现更多的运动模式。
14、本发明可依据环境需求可以选择合适的移动单元数量与运动模式,避免了在简单环境下机器人结构冗余与控制复杂的问题,适用于非结构化野外环境的勘探。
15、本发明在提高环境适应性的同时,可以依据环境需求对移动单元拼接组装,兼顾了避免机械结构冗余与控制简单的优点,适用于非结构化野外环境的勘探。
技术特征:
1.一种模块化多模式张拉移动机器人,包括多个移动单元,其特征在于:所述移动单元包括左右两侧对称布设的左刚性系杆(3)、右刚性系杆(4),所述左刚性系杆(3)、右刚性系杆(4)之间设置有位于前侧的前驱动机架(8)、位于后侧的后驱动机架(9),所述左刚性系杆(3)、右刚性系杆(4)之间设置有上下双排单向轮足组(15),所述单向轮足组(15)紧贴地面行走,所述左刚性系杆(3)、右刚性系杆(4)中还设置有进行杆系调节的滑移索组。
2.根据权利要求1所述的一种模块化多模式张拉移动机器人,其特征在于:所述前驱动机架(8)中设置有上下双排的前部单向轮足组(5),所述前部单向轮足组(5)左右两侧同时与左刚性系杆(3)、右刚性系杆(4)的前端相连。
3.根据权利要求1所述的一种模块化多模式张拉移动机器人,其特征在于:所述后驱动机架(9)中设置有上下双排的后部单向轮足组(7),所述后部单向轮足组(7)左右两侧同时与左刚性系杆(3)、右刚性系杆(4)的后端相连。
4.根据权利要求1所述的一种模块化多模式张拉移动机器人,其特征在于:所述左刚性系杆(3)、右刚性系杆(4)均包括四根刚性杆(23),所述刚性杆(23)两两一组呈交叉状布设,两组刚性杆(23)相连处形成中间关节。
5.根据权利要求4所述的一种模块化多模式张拉移动机器人,其特征在于:所述中间关节处设置有上下双排的中部单向轮足组(6)。
6.根据权利要求5所述的一种模块化多模式张拉移动机器人,其特征在于:所述两组中部单向轮足组(6)之间设置有弹性索(14)。
7.根据权利要求1所述的一种模块化多模式张拉移动机器人,其特征在于:所述前驱动机架(8)、后驱动机架(9)中设置有便于多个移动单元拼装的磁吸组件。
8.根据权利要求1所述的一种模块化多模式张拉移动机器人,其特征在于:所述前驱动机架(8)中设置有转动的中心轴(41),所述中心轴(41)两侧分别与一号绕线盘(35)、二号绕线盘(42)相连,一号绕线盘(35)、二号绕线盘(42)中设置有对下排单向轮足组(15)进行驱动的下排滑移索。
9.根据权利要求8所述的一种模块化多模式张拉移动机器人,其特征在于:所述后驱动机架(9)中设置有同步转动的三号绕线盘(43)、四号绕线盘(44),所述三号绕线盘(43)、四号绕线盘(44)中设置有对上排单向轮足组(15)进行驱动的上排滑移索。
10.根据权利要求1所述的一种模块化多模式张拉移动机器人,其特征在于:所述单向轮足组(15)中设置有进行地面行走的内轮足(29)、外轮足(30)。
技术总结
本发明公开了一种模块化多模式张拉移动机器人,包括多个移动单元,移动单元包括左右两侧对称布设的左刚性系杆、右刚性系杆,左刚性系杆、右刚性系杆之间设置有位于前侧的前驱动机架、位于后侧的后驱动机架,左刚性系杆、右刚性系杆之间设置有上下双排单向轮足组,单向轮足组紧贴地面行走,左刚性系杆、右刚性系杆中还设置有进行杆系调节的滑移索组。本发明中单个移动单元通过前驱动装置、后驱动装置控制上下两排滑移索的索长使连杆架产生运动,连杆架与滑移索的组合使移动单元形成蠕动与尺蠖运动形式,不同数量的移动单元通过吸附装置与对接装置连接后,连接后的机器人通过运动形式的组合可实现更多的运动模式。
技术研发人员:连宾宾,于泽,孙涛,杨琪
受保护的技术使用者:天津大学
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!