位置闭环控制方法、装置、系统和可读存储介质
本公开涉及控制,尤其涉及一种位置闭环控制方法、装置、系统和可读存储介质。
背景技术:
1、在随着车辆高级辅助驾驶技术、自动驾驶技术以及线控底盘技术的发展,乘用车转向系统需沿智能化和线控化两个方面发展。在电动助力转向系统中,转向控制器接收并跟踪高级辅助驾驶或自动驾驶控制器发出的转角/转速指令,用以实现循迹和避障等功能;在线控转向系统中,在满足高级辅助驾驶和自动驾驶对转向系统的需求之外,转向执行控制器亦需跟踪来自驾驶员的转向指令。
2、一方面,提高位置闭环控制的性能可以降低高级辅助驾驶功能和自动驾驶功能在循迹过程中的轨迹偏差,以及提高车辆在智能控制中的通过性和稳定性;另一方面,提高线控转向系统中位置闭环控制的性能可以降低转向滞后性,进而提高线控转向车辆的转向精准性。
3、现有角度跟踪控制算法包括难以明确性能要求和控制框架,一方面,现有角度跟踪控制算法的性能要求仍然参照自动泊车功能的标准,难以满足线控转向系统的性能需求;另一方面,成熟的量产位置闭环控制策略仍然沿用角度-转速-电流级联控制框架,角度跟踪控制响应存在明显的滞后性。
技术实现思路
1、本公开提供一种位置闭环控制方法、装置、系统和可读存储介质,以解决上述技术问题。
2、根据本公开的第一方面,提供一种位置闭环控制方法,所述方法包括:
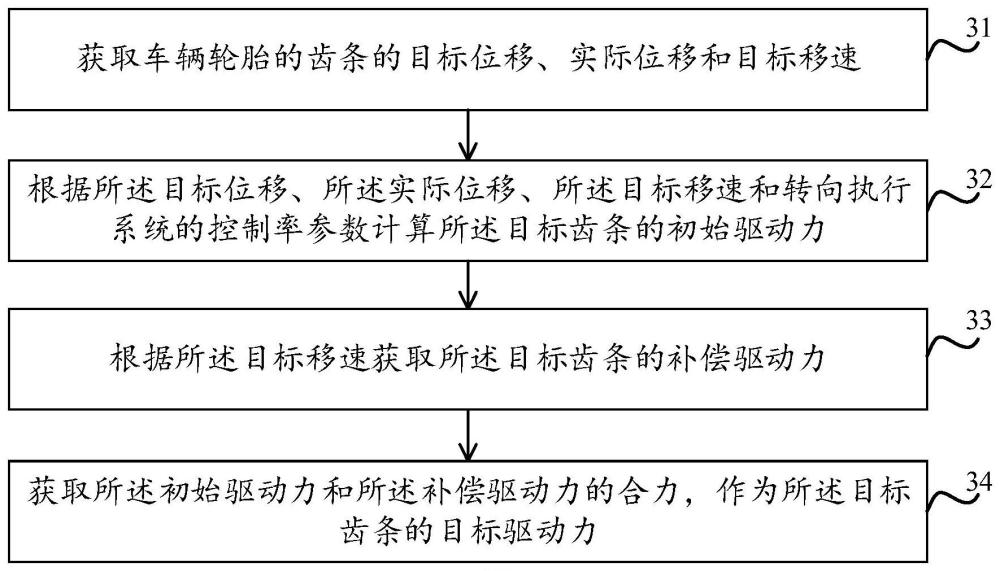
3、获取车辆轮胎的齿条的目标位移、实际位移和目标移速;
4、根据所述目标位移、所述实际位移、所述目标移速和转向执行系统的控制率参数计算所述目标齿条的初始驱动力;
5、根据所述目标移速获取所述目标齿条的补偿驱动力;
6、获取所述初始驱动力和所述补偿驱动力的合力,作为所述目标齿条的目标驱动力。
7、可选地,根据所述目标位移、所述实际位移、所述目标移速和转向执行系统的控制率参数计算所述目标齿条的初始驱动力,包括:
8、获取所述目标位移和所述实际位移的差值,得到位移偏差;
9、获取所述目标移速和所述实际位移对应的实际移速的差值,得到移速偏差;
10、根据所述位移偏差和所述控制率参数中的第一参数的乘积,作为第一驱动力;
11、根据所述位移偏差的积分值和所述控制率参数中的第二参数的乘积,作为第二驱动力;
12、根据所述移速偏差和所述控制率参数中的第一参数的乘积,作为第三驱动力;
13、获取所述第一驱动力、所述第二驱动力和所述第三驱动力的和值,作为所述初始驱动力。
14、可选地,所述控制率参数通过以下步骤获取:
15、获取转向执行系统的状态空间方程;
16、获取所述转向执行系统的被控输入的控制方程;
17、根据所述状态空间方程、所述控制方程、控制输入权重和跟踪性能权重构建所述转向执行系统的约束模型;
18、根据给定的控制输入权重和跟踪性能权重求解所述约束模型,得到所述控制率参数。
19、可选地,获取转向执行系统的状态空间方程,包括:
20、获取转向执行系统的动力学方程;
21、获取转向执行系统的积分状态方程;
22、根据所述动力学方程和所述积分状态方程获取所述转向执行系统的状态空间方程。
23、可选地,所述约束模型包括基于最优控制理论构建的线性二次型调节器设计系统的控制率,或者采用鲁棒控制理论设计系统的控制率。
24、可选地,根据所述目标移速获取所述目标齿条的补偿驱动力,包括:
25、利用相位矫正策略矫正所述目标移速,得到矫正移速;
26、利用动态摩擦模型处理所述矫正移速,得到所述目标齿条的补偿驱动力。
27、可选地,所述目标位移包括来自智能驾驶控制器或者路感模拟控制器;所述智能驾驶控制器用于在车辆智能驾驶模式下生成目标位移;所述路感模拟控制器用于人工驾驶模式下生成目标位移。
28、根据本公开的第二方面,提供一种位置闭环控制装置,所述装置包括:
29、位移移速获取模块,用于获取车辆轮胎的齿条的目标位移、实际位移和目标移速;
30、初始驱动力获取模块,用于根据所述目标位移、所述实际位移、所述目标移速和转向执行系统的控制率参数计算所述目标齿条的初始驱动力;
31、补偿驱动力获取模块,用于根据所述目标移速获取所述目标齿条的补偿驱动力;
32、目标驱动力获取模块,用于获取所述初始驱动力和所述补偿驱动力的合力,作为所述目标齿条的目标驱动力。
33、可选地,所述初始驱动力获取模块包括:
34、位移偏差获取子模块,用于获取所述目标位移和所述实际位移的差值,得到位移偏差;
35、移速偏差获取子模块,用于获取所述目标移速和所述实际位移对应的实际移速的差值,得到移速偏差;
36、第一驱动力获取子模块,用于根据所述位移偏差和所述控制率参数中的第一参数的乘积,作为第一驱动力;
37、第二驱动力获取子模块,用于根据所述位移偏差的积分值和所述控制率参数中的第二参数的乘积,作为第二驱动力;
38、第三驱动力获取子模块,用于根据所述移速偏差和所述控制率参数中的第一参数的乘积,作为第三驱动力;
39、初始驱动力获取子模块,用于获取所述第一驱动力、所述第二驱动力和所述第三驱动力的和值,作为所述初始驱动力。
40、可选地,所述装置还包括控制率参数获取模块,所述控制率参数获取模块包括:
41、状态方程获取子模块,用于获取转向执行系统的状态空间方程;
42、控制方程获取子模块,用于获取所述转向执行系统的被控输入的控制方程;
43、约束模型获取子模块,用于根据所述状态空间方程、所述控制方程、控制输入权重和跟踪性能权重构建所述转向执行系统的约束模型;
44、控制率参数获取子模块,用于根据给定的控制输入权重和跟踪性能权重求解所述约束模型,得到所述控制率参数。
45、可选地,所述状态方程获取子模块包括:
46、动力学方程获取单元,用于获取转向执行系统的动力学方程;
47、积分状态方程获取单元,用于获取转向执行系统的积分状态方程;
48、状态方程获取单元,用于根据所述动力学方程和所述积分状态方程获取所述转向执行系统的状态空间方程。
49、可选地,所述约束模型包括基于最优控制理论构建的线性二次型调节器设计系统的控制率,或者采用鲁棒控制理论设计系统的控制率。
50、可选地,根据所述目标移速获取所述目标齿条的补偿驱动力,包括:
51、利用相位矫正策略矫正所述目标移速,得到矫正移速;
52、利用动态摩擦模型处理所述矫正移速,得到所述目标齿条的补偿驱动力。
53、可选地,所述目标位移包括来自智能驾驶控制器或者路感模拟控制器;所述智能驾驶控制器用于在车辆智能驾驶模式下生成目标位移;所述路感模拟控制器用于人工驾驶模式下生成目标位移。
54、根据本公开的第三方面,提供一种位置闭环控制系统,包括处理器、存储器和传感器;
55、所述传感器用于检测车辆轮胎的齿条的实际位移,并发送给所述处理器;
56、所述存储器用于存储所述处理器可执行的计算机程序;
57、其中,所述处理器用于执行所述存储器中的计算机程序,以实现如第一方面任一项所述的方法。
58、根据本公开的第四方面,提供一种非暂态计算机可读存储介质,当所述存储介质中的可执行的计算机程序由处理器执行时,能够实现如第一方面任一项所述的方法。
59、本公开的实施例提供的技术方案可以包括以下有益效果:
60、本实施例提供的位置闭环控制方法,可以获取车辆轮胎的齿条的目标位移、实际位移和目标移速;然后,根据所述目标位移、所述实际位移、所述目标移速和转向执行系统的控制率参数计算所述目标齿条的初始驱动力;之后,根据所述目标移速获取所述目标齿条的补偿驱动力;最后,获取所述初始驱动力和所述补偿驱动力的合力,作为所述目标齿条的目标驱动力。这样,本实施例通过提供补偿驱动力即前馈补偿可以改善车辆在转向启动、换向以及小幅度慢打过程中的控制性能,能够适用于电动助力转向系统和线控转向系统。
61、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
- 还没有人留言评论。精彩留言会获得点赞!