一种河道垃圾回收用无人船的制作方法
[0001]
本发明涉及环卫设备技术领域,具体是涉及一种河道垃圾回收用无人船。
背景技术:
[0002]
垃圾是失去使用价值、无法利用的废弃物品,是物质循环的重要环节。是不被需要或无用的固体、流体物质。在人口密集的大城市,垃圾处理是一个令人头痛的问题。常见的做法是收集后送往堆填区进行填埋处理,或是用焚化炉焚化。但两者均会制造环境保护的问题,而终止过度消费可进一步减轻堆填区饱和程度。堆填区中的垃圾处理不但会污染地下水和发出臭味,而且很多城市可供堆填的面积已越来越少。焚化则无可避免会产生有毒气体,危害生物体。多数的城市都在研究减少垃圾产生的方法,和鼓励资源回收。
[0003]
垃圾分类是实现减量、提质、增效的必然选择,是改善人居环境、促进城市精细化管理、保障可持续发展的重要举措。能不能做到垃圾分类,直接反映一个人,乃至一座城市的生态素养和文明程度。
[0004]
但是在湖泊河流中,还会存在大量的垃圾,这些垃圾或是被丢落其中,或是被吹入其中,这些垃圾会随着垃圾的堆积,会影响河流水质,因此为了保护河流环境,人们会将河流上的垃圾进行清理,目前在对河流沿岸的垃圾进行收集的时候,大部分都是采用人工手持工具对其进行收集和打捞,但是这样存在的缺点是很难快速的对垃圾进行收集,所以需要提出一种河道垃圾回收用无人船,可以对河流中的垃圾进行批量打捞,并且可以处理垃圾中的残余水,提高了工作效率以及工作质量。
技术实现要素:
[0005]
为解决上述技术问题,提供一种河道垃圾回收用无人船,本技术方案可以对河流中的垃圾进行批量打捞,并且可以处理垃圾中的残余水,提高了工作效率以及工作质量。
[0006]
为达到以上目的,本发明采用的技术方案为:
[0007]
一种河道垃圾回收用无人船,包括:
[0008]
无人船;
[0009]
第一拨料机构和第二拨料机构,第一拨料机构和第二拨料机构设置于无人船首部的两侧,第一拨料机构和第二拨料机构用于将无人船两侧垃圾拨动于无人船的首部;
[0010]
上料机构,设置于无人船的首部,上料机构用于将无人船首部的垃圾进行打捞并输送;
[0011]
滤水机构,设置于无人船上,并且滤水机构位于上料机构的出料端,滤水机构用于去除垃圾中的水;
[0012]
储存兜,设置于无人船上,储存兜位于滤水机构的出料端,储存兜用于对垃圾进行收集;
[0013]
排水组件,设置于无人船的底部,排水组件用于将无人船内的废水排出。
[0014]
优选的,第一拨料机构包括:
[0015]
转动架,设置于无人船首部的一侧;
[0016]
转动杆,转动杆的一端与转动架可转动连接,转动杆另一端的底部设置有拨动板;
[0017]
回转气缸,设置于转动架的顶部,回转气缸的输出端与转动杆的受力端连接。
[0018]
优选的,上料机构包括:
[0019]
翻转机构,设置于无人船的首部;
[0020]
升降机构,翻转机构的输出端与升降机构的非工作部传动连接;
[0021]
上料斗,呈铲斗状,上料斗底部的一面为弧形,弧形面朝向滤水机构,上料斗的顶部设置有第一耳朵板和第二耳朵板,第一耳朵板和第二耳朵板分别位于上料斗的两侧,第一耳朵板和第二耳朵板与升降机构的输出端连接。
[0022]
优选的,升降机构包括:
[0023]
套筒,套筒套设于翻转机构输出端并与其固定连接;
[0024]
第一转板和第二转板,第一转板和第二转板对称设置于套筒的两端;
[0025]
第一气缸,设置于第一转板上,并且第一气缸的输出端与第一耳朵板固定连接;
[0026]
导向杆,导向杆的底端设置于第一转板的顶部,导向杆的顶端贯穿第二转板并与其滑动连接。
[0027]
优选的,翻转机构包括:
[0028]
转动座,设置于无人船的首部;
[0029]
连动杆,连动杆贯穿转动座并与其可转动连接,套筒套设于连动杆上并与其固定连接;
[0030]
第一伺服电机,设置于转动座上,第一伺服电机的输出端与连动杆的受力端连接。
[0031]
优选的,滤水机构包括:
[0032]
垃圾储存组件,设置于无人船上,并且垃圾储存组件位于上料机构的出料端;
[0033]
送料板,设置于垃圾储存组件内并与其滑动连接;
[0034]
摆动组件,设置于无人船的一侧,并且摆动组件的输出端与垃圾储存组件的活动端传动连接;
[0035]
送料驱动组件,设置于无人船的另一侧,并且送料驱动组件的输出端与送料板固定连接。
[0036]
优选的,垃圾储存组件包括:
[0037]
镂空壳;
[0038]
出料板,设置于镂空壳的一侧,并且出料板的顶部与镂空壳铰接;
[0039]
滑块,滑块对称设置于镂空壳的顶部;
[0040]
滑轨,对称设置于无人船上,并且滑块与滑轨滑动连接。
[0041]
优选的,摆动组件包括:
[0042]
第二伺服电机,设置于无人船上;
[0043]
第一连杆,第一连杆的受力端与第二伺服电机的输出端固定连接;
[0044]
第二连杆,第二连杆的受力端与第一连杆的输出端铰接,第二连杆的输出端与镂空壳铰接。
[0045]
优选的,送料驱动组件包括:
[0046]
固定板,设置于无人船上;
[0047]
第二气缸,设置于固定板上;
[0048]
连动板,设置于第二气缸的输出端,并且连动板的一端贯穿镂空壳与送料板固定连接;
[0049]
限位杆,设置于连动板上,限位杆贯穿固定板并与其滑动连接。
[0050]
优选的,排水组件包括:
[0051]
储水仓,设置于无人船的底部;
[0052]
出水管,出水管的一端与储水仓内连通,出水管的另一端朝向无人船外部;
[0053]
水泵,水泵安装于出水管上。
[0054]
本发明与现有技术相比具有的有益效果是:首先工作人员将本设备放置于河道中,无人船、第一拨料机构、第二拨料机构、上料机构、滤水机构和排水组件均与遥控器连接,工作人员通过遥控器操纵无人船在河道内进行行驶,无人船在河道内进行的过程中第一拨料机构和第二拨料机构同时开始工作,第一拨料机构和第二拨料机构的输出端同时呈现钳状互相靠近,在第一拨料机构和第二拨料机构输出端互相靠近的过程中将无人船船身两侧的垃圾拨到无人船的首部,此时堆积的垃圾位于上料机构的的上方,上料机构开始工作,上料机构的输出端将堆积的垃圾从水中打捞上来,并且在垃圾打捞上来后上料机构的输出端进行翻转将堆积的垃圾倒入滤水机构的内部,然后滤水机构开始工作,滤水机构的输出端带动垃圾进行不停的左右摆动,垃圾中的种类繁多,例如塑料袋和塑料瓶等等,通过滤水机构的输出端带动垃圾不停摆动的过程中可以将储存在垃圾中的水全部都抖出来,一方面是为了有效减重,另一方面也是为了便于回收,当滤水机构将垃圾中的水取出完毕后,滤水机构便将垃圾输送至储存兜的内部,通过储存兜对垃圾进行暂时的储存,通过滤水机构去除后的废水和储存兜中滴落的废水统统落入排水组件的内部,排水组件全程处于工作中,排水组件的工作端将去除后的废水再次排放回河道内;
[0055]
1、通过滤水机构的设置,可以将垃圾中的废水进行去除;
[0056]
2、通过本设备的设置,可以对河流中的垃圾进行批量打捞,并且可以处理垃圾中的残余水,提高了工作效率以及工作质量。
附图说明
[0057]
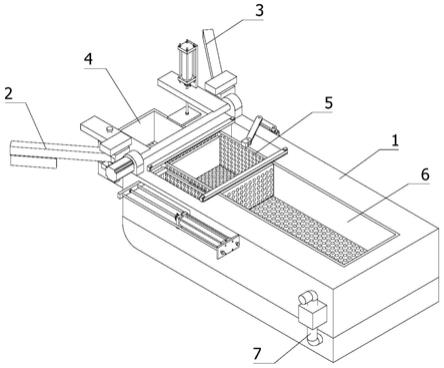
图1为本发明的立体结构示意图一;
[0058]
图2为本发明的立体结构示意图二;
[0059]
图3为本发明的立体结构示意图三;
[0060]
图4为本发明的图3的a处放大图;
[0061]
图5为本发明的主视图;
[0062]
图6为本发明的上料机构的立体结构示意图一;
[0063]
图7为本发明的上料机构的立体结构示意图二;
[0064]
图8为本发明的无人船、滤水机构、储水兜和排水组件的立体结构示意图一;
[0065]
图9为本发明的无人船、滤水机构、储水兜和排水组件的立体结构示意图二;
[0066]
图10为本发明的垃圾储存组件的立体结构示意图。
[0067]
图中标号为:
[0068]
1-无人船;
[0069]
2-第一拨料机构;2a-转动杆;2a1-拨动板;2b-转动架;2c-回转气缸;
[0070]
3-第二拨料机构;
[0071]
4-上料机构;4a-上料斗;4a1-第一耳朵板;4a2-第二耳朵板;4b-升降机构;4b1-套筒;4b2-第一转板;4b3-第二转板;4b4-第一气缸;4b5-导向杆;4c-翻转机构;4c1-转动座;4c2-连动杆;4c3-第一伺服电机;
[0072]
5-滤水机构;5a-垃圾储存组件;5a1-镂空壳;5a2-出料板;5a3-滑块;5a4-滑轨;5b-送料板;5c-摆动组件;5c1-第二伺服电机;5c2-第一连杆;5c3-第二连杆;5d-送料驱动组件;5d1-固定板;5d2-第二气缸;5d3-连动板;5d4-限位杆;
[0073]
6-储存兜;
[0074]
7-排水组件;7a-储水仓;7b-出水管;7c-水泵。
具体实施方式
[0075]
以下描述用于揭露本发明以使本领域技术人员能够实现本发明。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。
[0076]
参照图1至图2所示,一种河道垃圾回收用无人船,包括:
[0077]
无人船1;
[0078]
第一拨料机构2和第二拨料机构3,第一拨料机构2和第二拨料机构3设置于无人船1首部的两侧,第一拨料机构2和第二拨料机构3用于将无人船1两侧垃圾拨动于无人船1的首部;
[0079]
上料机构4,设置于无人船1的首部,上料机构4用于将无人船1首部的垃圾进行打捞并输送;
[0080]
滤水机构5,设置于无人船1上,并且滤水机构5位于上料机构4的出料端,滤水机构5用于去除垃圾中的水;
[0081]
储存兜6,设置于无人船1上,储存兜6位于滤水机构5的出料端,储存兜6用于对垃圾进行收集;
[0082]
排水组件7,设置于无人船1的底部,排水组件7用于将无人船1内的废水排出。
[0083]
首先工作人员将本设备放置于河道中,无人船1、第一拨料机构2、第二拨料机构3、上料机构4、滤水机构5和排水组件7均与遥控器连接,工作人员通过遥控器操纵无人船1在河道内进行行驶,无人船1在河道内进行的过程中第一拨料机构2和第二拨料机构3同时开始工作,第一拨料机构2和第二拨料机构3的输出端同时呈现钳状互相靠近,在第一拨料机构2和第二拨料机构3输出端互相靠近的过程中将无人船1船身两侧的垃圾拨到无人船1的首部,此时堆积的垃圾位于上料机构4的的上方,上料机构4开始工作,上料机构4的输出端将堆积的垃圾从水中打捞上来,并且在垃圾打捞上来后上料机构4的输出端进行翻转将堆积的垃圾倒入滤水机构5的内部,然后滤水机构5开始工作,滤水机构5的输出端带动垃圾进行不停的左右摆动,垃圾中的种类繁多,例如塑料袋和塑料瓶等等,通过滤水机构5的输出端带动垃圾不停摆动的过程中可以将储存在垃圾中的水全部都抖出来,一方面是为了有效减重,另一方面也是为了便于回收,当滤水机构5将垃圾中的水取出完毕后,滤水机构5便将垃圾输送至储存兜6的内部,通过储存兜6对垃圾进行暂时的储存,通过滤水机构5去除后的废水和储存兜6中滴落的废水统统落入排水组件7的内部,排水组件7全程处于工作中,排水
组件7的工作端将去除后的废水再次排放回河道内。
[0084]
如图4所示第一拨料机构2包括:
[0085]
转动架2b,设置于无人船1首部的一侧;
[0086]
转动杆2a,转动杆2a的一端与转动架2b可转动连接,转动杆2a另一端的底部设置有拨动板2a1;
[0087]
回转气缸2c,设置于转动架2b的顶部,回转气缸2c的输出端与转动杆2a的受力端连接;
[0088]
第一拨料机构2和第二拨料机构3同时开始工作,回转气缸2c的输出端带动转动杆2a进行转动,两个转动杆2a从无人船1的两侧同时向无人船1的首部靠拢,两个转动杆2a通过拨动板2a1将水面上的垃圾拨至无人船1的首部,转动架2b用于固定支撑。
[0089]
如图6所示上料机构4包括:
[0090]
翻转机构4c,设置于无人船1的首部;
[0091]
升降机构4b,翻转机构4c的输出端与升降机构4b的非工作部传动连接;
[0092]
上料斗4a,呈铲斗状,上料斗4a底部的一面为弧形,弧形面朝向滤水机构5,上料斗4a的顶部设置有第一耳朵板4a1和第二耳朵板4a2,第一耳朵板4a1和第二耳朵板4a2分别位于上料斗4a的两侧,第一耳朵板4a1和第二耳朵板4a2与升降机构4b的输出端连接;
[0093]
上料斗4a处于水下,当垃圾处于上料斗4a的上方时升降机构4b开始工作,升降机构4b的输出端通过第一耳朵板4a1和第二耳朵板4a2带动上料斗4a上升,上料斗4a在上升到水面上时将垃圾盛入其中,翻转机构4c开始工作,翻转机构4c的输出端带动升降机构4b翻转,升降机构4b带动上料斗4a进行翻转,上料斗4a翻转后垃圾落入滤水机构5内。
[0094]
如图7所示升降机构4b包括:
[0095]
套筒4b1,套筒4b1套设于翻转机构4c输出端并与其固定连接;
[0096]
第一转板4b2和第二转板4b3,第一转板4b2和第二转板4b3对称设置于套筒4b1的两端;
[0097]
第一气缸4b4,设置于第一转板4b2上,并且第一气缸4b4的输出端与第一耳朵板4a1固定连接;
[0098]
导向杆4b5,导向杆4b5的底端设置于第一转板4b2的顶部,导向杆4b5的顶端贯穿第二转板4b3并与其滑动连接;
[0099]
升降机构4b开始工作,第一气缸4b4的输出端通过第一耳朵板4a1带动上料斗4a上升,第二转板4b3和导向杆4b5用于对上料斗4a的移动方向进行引导,翻转机构4c的输出端带动套筒4b1转动,套筒4b1同时带动第一转板4b2和第二转板4b3进行转动,第一转板4b2和第二转板4b3通过第一气缸4b4和导向杆4b5带动上料斗4a进行向上进行翻转。
[0100]
如图7所示翻转机构4c包括:
[0101]
转动座4c1,设置于无人船1的首部;
[0102]
连动杆4c2,连动杆4c2贯穿转动座4c1并与其可转动连接,套筒4b1套设于连动杆4c2上并与其固定连接;
[0103]
第一伺服电机4c3,设置于转动座4c1上,第一伺服电机4c3的输出端与连动杆4c2的受力端连接;
[0104]
翻转机构4c开始工作,第一伺服电机4c3的输出端带动连动杆4c2转动,连动杆4c2
带动套筒4b1转动。
[0105]
如图8所示滤水机构5包括:
[0106]
垃圾储存组件5a,设置于无人船1上,并且垃圾储存组件5a位于上料机构4的出料端;
[0107]
送料板5b,设置于垃圾储存组件5a内并与其滑动连接;
[0108]
摆动组件5c,设置于无人船1的一侧,并且摆动组件5c的输出端与垃圾储存组件5a的活动端传动连接;
[0109]
送料驱动组件5d,设置于无人船1的另一侧,并且送料驱动组件5d的输出端与送料板5b固定连接;
[0110]
垃圾被倾倒于垃圾储存组件5a的储料处,然后摆动组件5c开始工作,摆动组件5c的输出端带动垃圾储存组件5a的储料处进行晃动,然后送料驱动组件5d开始工作,送料驱动组件5d的输出端带动送料板5b进行移动,送料板5b的将垃圾储存组件5a储料处内的垃圾进行拨至储存兜6内。
[0111]
如图10所示垃圾储存组件5a包括:
[0112]
镂空壳5a1;
[0113]
出料板5a2,设置于镂空壳5a1的一侧,并且出料板5a2的顶部与镂空壳5a1铰接;
[0114]
滑块5a3,滑块5a3对称设置于镂空壳5a1的顶部;
[0115]
滑轨5a4,对称设置于无人船1上,并且滑块5a3与滑轨5a4滑动连接;
[0116]
镂空壳5a1用于对垃圾进行盛载,垃圾中的水从镂空壳5a1的镂孔流出,送料板5b向出料板5a2处进行移动,送料板5b通过垃圾将送料板5b推开,接着垃圾就被推入储存兜6内,滑块5a3和滑轨5a4用于限制镂空壳5a1的移动方向。
[0117]
如图9所示摆动组件5c包括:
[0118]
第二伺服电机5c1,设置于无人船1上;
[0119]
第一连杆5c2,第一连杆5c2的受力端与第二伺服电机5c1的输出端固定连接;
[0120]
第二连杆5c3,第二连杆5c3的受力端与第一连杆5c2的输出端铰接,第二连杆5c3的输出端与镂空壳5a1铰接;
[0121]
第二伺服电机5c1开始工作,第二伺服电机5c1的输出端带动第一连杆5c2的受力端转动,第一连杆5c2的输出端通过第二连杆5c3带动镂空壳5a1沿滑轨5a4进行晃动。
[0122]
如图9所示送料驱动组件5d包括:
[0123]
固定板5d1,设置于无人船1上;
[0124]
第二气缸5d2,设置于固定板5d1上;
[0125]
连动板5d3,设置于第二气缸5d2的输出端,并且连动板5d3的一端贯穿镂空壳5a1与送料板5b固定连接;
[0126]
限位杆5d4,设置于连动板5d3上,限位杆5d4贯穿固定板5d1并与其滑动连接;
[0127]
第二气缸5d2的输出端带动连动板5d3进行收缩,连动板5d3带动送料板5b进行移动,固定板5d1用于固定支撑,限位杆5d4用于限制固定板5d1的移动方向。
[0128]
如图5所示排水组件7包括:
[0129]
储水仓7a,设置于无人船1的底部;
[0130]
出水管7b,出水管7b的一端与储水仓7a内连通,出水管7b的另一端朝向无人船1外
部;
[0131]
水泵7c,水泵7c安装于出水管7b上;
[0132]
滤水机构5和储存兜6漏出的废水流入储水仓7a内,水泵7c开始工作,水泵7c通过出水管7b将储水仓7a内的废水排出,储水仓7a同时也为无人船1提供浮力。
[0133]
本发明的工作原理:首先工作人员将本设备放置于河道中,无人船1、第一拨料机构2、第二拨料机构3、上料机构4、滤水机构5和排水组件7均与遥控器连接,工作人员通过遥控器操纵无人船1在河道内进行行驶,无人船1在河道内进行的过程中第一拨料机构2和第二拨料机构3同时开始工作,第一拨料机构2和第二拨料机构3同时开始工作,回转气缸2c的输出端带动转动杆2a进行转动,两个转动杆2a从无人船1的两侧同时向无人船1的首部靠拢,两个转动杆2a通过拨动板2a1将水面上的垃圾拨至无人船1的首部,当垃圾处于上料斗4a的上方时升降机构4b开始工作,升降机构4b开始工作,第一气缸4b4的输出端通过第一耳朵板4a1带动上料斗4a上升,上料斗4a在上升到水面上时将垃圾盛入其中,翻转机构4c开始工作,翻转机构4c的输出端带动升降机构4b翻转,升降机构4b带动上料斗4a进行翻转,上料斗4a翻转后垃圾落入镂空壳5a1内,第二伺服电机5c1开始工作,第二伺服电机5c1的输出端带动第一连杆5c2的受力端转动,第一连杆5c2的输出端通过第二连杆5c3带动镂空壳5a1沿滑轨5a4进行晃动,垃圾中的种类繁多,例如塑料袋和塑料瓶等等,通过滤水机构5的输出端带动垃圾不停摆动的过程中可以将储存在垃圾中的水全部都抖出来,一方面是为了有效减重,另一方面也是为了便于回收,当滤水机构5将垃圾中的水取出完毕后,第二气缸5d2的输出端带动连动板5d3进行收缩,连动板5d3带动送料板5b进行移动,送料板5b通过垃圾将送料板5b推开,接着垃圾就被推入储存兜6内,通过储存兜6对垃圾进行暂时的储存,通过滤水机构5去除后的废水和储存兜6中滴落的废水统统落入储水仓7a的内部,水泵7c全程处于工作中,水泵7c通过出水管7b将储水仓7a内的废水排放回河道内。
[0134]
本装置通过以下步骤实现本发明的功能,进而解决了本发明提出的技术问题:
[0135]
步骤一、工作人员通过遥控器操纵无人船1在河道内进行行驶;
[0136]
步骤二、第一拨料机构2和第二拨料机构3同时开始工作,第一拨料机构2和第二拨料机构3输出端互相靠近的过程中将无人船1船身两侧的垃圾拨到无人船1的首部;
[0137]
步骤三、上料机构4开始工作,上料机构4的输出端将堆积的垃圾从水中打捞上来,并且在垃圾打捞上来后上料机构4的输出端进行翻转将堆积的垃圾倒入滤水机构5的内部;
[0138]
步骤四、滤水机构5开始工作,滤水机构5的输出端带动垃圾进行不停的左右摆动,滤水机构5将垃圾中的水取出完毕后,滤水机构5便将垃圾输送至储存兜6的内部;
[0139]
步骤五、通过储存兜6对垃圾进行暂时的储存;
[0140]
步骤六、排水组件7全程处于工作中,排水组件7将滤水机构5和储存兜6排出的废水再次排放回河道内。
[0141]
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明的范围内。本发明要求的保护范围由所附的权利要求书及其等同物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1