一种基于塔式吊机的大型潜航器海上回收装置及回收方法
1.本发明涉及海洋机器人回收技术领域,具体地说是一种基于塔式吊机的大型潜航器海上回收装置及回收方法。
背景技术:
2.从上世纪90年代中期以来,水下机器人在海洋科学考察以及军事领域得到越来越广泛的应用。水下机器人的作业能力很大程度上受海域海况的影响,而海况的影响主要体现在布放和回收过程阶段,因此研制安全、可靠、快速的收放系统是提高水下机器人海洋适应能力的重要途径之一。
3.目前水下机器人的海上布放回收系统主要有折臂吊、a型架装置等,其中折臂吊是最简易的一种潜水器收放系统,可针对潜水器本体结构特征定制设计,也可直接利用母船上已有的克令吊作为吊臂,该种收放方式具有结构简单、成本较低、占用母船空间少等优点,目前广泛应用于各类中小型潜水器的收放作业,但折臂吊收放系统功能单一,作业时需要船上人员配合进行潜水器保护。而a型架收放系统目前是最具代表性的潜水器收放系统,技术相对成熟,广泛应用于中小型潜水器收放作业,其通常由a型门架、缓冲对接保护装置、释放回收装置、绞车、液压系统、电控系统等组成,该系统通用性强,不仅可以收放潜水器,还可以用于其他水下作业装备。
4.相比于传统的百公斤级、吨级中小型水下机器人,近年来很多国家已将大型(lduuv)、超大型(xluuv)水下机器人列入明确规划,比如美国波音公司研制的50吨级“回声巡航者”大型无人潜航器已进入最后的试验阶段,最大工作深度达3300米,可见水下机器人正朝着大型化、大潜深方向发展。
5.针对大型水下机器人海上收放(百吨级)而言,上述两种方式均存在一定的缺陷,首先是a型架收放系统虽然也能实现收放,但其尺度也将随着潜航器长度的增加而增大,导致保障母船排水量剧增,而采用折臂吊收放,对于潜航器的安全防护实施难度较大,无法通过人工方式进行止荡。因此,针对大型潜航器研制一种集起吊、对接、安全防护于一体的收放装置非常有必要。
技术实现要素:
6.本发明的目的在于提供一种基于塔式吊机的大型潜航器海上回收装置及回收方法,在回收作业时能够实现潜航器垂直起吊并安全落在载体支撑座上,集对接、起吊和安全防护于一体,可应用于大型潜航器的海上回收。
7.本发明的目的是通过以下技术方案来实现的:
8.一种基于塔式吊机的大型潜航器海上回收装置,其特征在于:包括塔式起升机构、载体支撑座和试验保障船,塔式起升机构和载体支撑座均可移动地设于所述试验保障船上,且塔式起升机构沿着横向移动,载体支撑座沿着纵向移动,所述塔式起升机构包括移动底座、立架、起落架、起重缆、起吊缆和对接锁紧装置,立架设于移动底座上,起落架可升降
地设于立架一侧,起重缆一端与设于试验保障船上的起重缆绞车连接,另一端绕过立架上端后与起落架连接,起落架端部设有缓冲座,缓冲座下侧设有对接锁紧装置,起吊缆一端与设于试验保障船上的起吊缆绞车连接,另一端绕过立架上端并穿过所述缓冲座后与潜航器连接,所述试验保障船回收侧设有碰撞缓冲机构。
9.所述起落架前端设有连接座,且所述连接座通过多个缓冲液压缸与下侧的缓冲座连接。
10.所述立架上端前侧设有两个第一起重缆导向轮、后侧设有两个第二起重缆导向轮,两条起重缆由起重缆绞车引出后分别依次绕过对应侧的第二起重缆导向轮和第一起重缆导向轮后与所述起落架固连,所述起吊缆设于两条起重缆之间。
11.所述立架上端前侧设有第一起吊缆导向轮,所述立架中部后侧设有第二起吊缆导向轮,起吊缆由起吊缆绞车引出后依次绕过所述第二起吊缆导向轮和第一起吊缆导向轮,并穿过所述缓冲座后与潜航器连接。
12.所述立架一侧设有升降滑轨,在所述起落架后侧设有与所述升降滑轨配合的滑块。
13.所述试验保障船上设有横向轨道和纵向轨道,所述移动底座沿着对应的横向轨道移动,所述载体支撑座沿着对应的纵向轨道移动。
14.所述碰撞缓冲机构包括驱动液压缸、伸缩剪叉组件和气囊,所述伸缩剪叉组件通过所述驱动液压缸驱动伸缩,气囊设于所述伸缩剪叉组件的自由端。
15.一种根据所述基于塔式吊机的大型潜航器海上回收装置的回收方法,包括如下步骤:
16.步骤一:塔式起升机构移动至试验保障船的回收侧船舷,且试验保障船移动至等待回收位置;
17.步骤二:起吊缆绞车释放起吊缆,起吊缆由工作艇牵引至潜航器附近,人工将起吊缆与潜航器连接;
18.步骤三:碰撞缓冲机构启动;
19.步骤四:起吊缆绞车回收起吊缆并将潜航器拖曳靠近侧舷,回收过程中潜航器与碰撞缓冲机构相抵,并且所述碰撞缓冲机构随着潜航器的回收收缩;
20.步骤五:起吊缆绞车继续回收起吊缆,并将潜航器快速提出水面并压紧到对接锁紧装置下侧锁紧固定;
21.步骤六、起重缆绞车启动回收起重缆,并通过起落架带动潜航器垂直提升至预定位置,同时起吊缆绞车同步回收起吊缆使潜航器一直压紧在对接锁紧装置上;
22.步骤七:载体支撑座沿着纵向向两侧移动,预留出塔式起升机构横向移动空间,然后塔式起升机构沿着横向向后移动至预定位置;
23.步骤八:载体支撑座沿着纵向向中间移动,然后起重缆和起吊缆同时放缆将潜航器放在载体支撑座上。
24.本发明的优点与积极效果为:
25.1、本发明的塔式起升机构利用起吊缆拖曳潜航器回收并与对接锁紧装置对接锁紧,然后利用起重缆驱动起落架带动潜航器垂直升降,并且塔式起升机构可沿着横向轨道移动,能够将潜航器安全地放在沿着纵向轨道移动的载体支撑座上,本发明集对接、起吊和
安全防护于一体,可应用于大型潜航器的海上回收。
26.2、本发明的塔式起升机构在缓冲座下侧设有对接锁紧装置,所述缓冲座可缓冲试验保障船的横、纵摇动对潜航器载体的运动冲击,进而减小潜航器的摆动幅度,起到保护作用。
27.3、本发明在试验保障船一侧设有碰撞缓冲机构,可缓冲潜航器与船体侧舷的碰撞冲击,避免潜航器碰撞损坏,并且所述碰撞缓冲机构会随着潜航器的回收逐渐收缩,不影响潜航器对接起吊。
28.4、本发明布局合理紧凑,操作方便。
附图说明
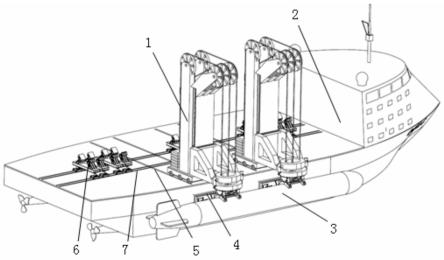
29.图1为本发明的总体示意图,
30.图2为图1中的塔式起升机构示意图,
31.图3为图1中的碰撞缓冲机构示意图,
32.图4为本发明回收潜航器的流程示意图一,
33.图5为本发明回收潜航器的流程示意图二,
34.图6为本发明回收潜航器的流程示意图三,
35.图7为本发明回收潜航器的流程示意图四,
36.图8为本发明回收潜航器的流程示意图五,
37.图9为本发明回收潜航器的流程示意图六。
38.其中,1为塔式起升机构,101为移动底座,102为立架,103为升降滑轨,104为起落架,105为起重缆,106为第一起重缆导向轮,107为第一起吊缆导向轮,108为起吊缆,109为缓冲座,110为对接锁紧装置,111为连接座,112为缓冲液压缸,113为第二起重缆导向轮,114为第二起吊缆导向轮,2为试验保障船,3为潜航器,4为碰撞缓冲机构,401为驱动液压缸,402为伸缩剪叉组件,403为气囊,5为横移轨道,6为载体支撑座,7为纵移轨道。
具体实施方式
39.下面结合附图对本发明作进一步详述。
40.如图1~9所示,本发明包括塔式起升机构1、载体支撑座6和试验保障船2,塔式起升机构1和载体支撑座6均可移动地设于所述试验保障船2上,且所述塔式起升机构1沿着横向移动,载体支撑座6沿着纵向移动,如图2所示,所述塔式起升机构1包括移动底座101、立架102、起落架104、起重缆105、起吊缆108和对接锁紧装置110,其中立架102垂直设于所述移动底座101上,起落架104可升降地设于所述立架102一侧,起重缆105一端与设于试验保障船2上的起重缆绞车连接,另一端绕过所述立架102上端后与所述起落架104连接,所述起落架104即通过所述起重缆105带动升降,所述起落架104端部设有缓冲座109,所述缓冲座109下侧设有对接锁紧装置110,起吊缆108一端与设于试验保障船2上的起吊缆绞车连接,另一端绕过所述立架102上端并穿过所述缓冲座109后与潜航器3连接。所述缓冲座109下侧的对接锁紧装置110为本领域公知技术且为市购产品。
41.如图2所示,所述起落架104前端设有连接座111,且所述连接座111通过多个缓冲液压缸112与下侧的缓冲座109连接,本发明通过缓冲液压缸112的阻尼作用缓冲试验保障
船2的横、纵摇动对潜航器3载体的运动冲击,进而减小潜航器3的摆动幅度,起到保护作用。
42.如图2所示,所述立架102上端前侧设有两个第一起重缆导向轮106、后侧设有两个第二起重缆导向轮113,两条起重缆105由船载起重缆绞车引出后分别依次绕过对应侧的第二起重缆导向轮113和第一起重缆导向轮106后与所述起落架104固连。
43.如图2所示,所述立架102上端前侧设有第一起吊缆导向轮107,所述立架102中部后侧设有第二起吊缆导向轮114,起吊缆108由起吊缆绞车引出后依次绕过所述第二起吊缆导向轮114和第一起吊缆导向轮107,并且穿过所述连接座111和缓冲座109后与潜航器3连接,所述起吊缆108设于两条起重缆105之间。
44.如图2所示,所述起落架104与所述立架102滑动连接,在所述立架102一侧设有升降滑轨103,在所述起落架104后侧设有与所述升降滑轨103配合的滑块。
45.如图1所示,所述试验保障船2上设有横向轨道5和纵向轨道7,其中所述移动底座101下侧设有车轮沿着所述横向轨道5移动,所述载体支撑座6下侧设有车轮沿着所述纵向轨道7移动。
46.本实施例中,所述移动底座101和载体支撑座6均为移动小车结构,其内部设有伺服电机驱动移动小车任一对车轮转动,进而实现移动。
47.本实施例中,试验保障船2上设有两组横向轨道5对应两个塔式起升机构1,另外设有一组纵向轨道7,其上设有多个载体支撑座6,且各个载体支撑座6可独立移动。
48.如图1所示,所述试验保障船2回收侧设有碰撞缓冲机构4,如图3所示,所述碰撞缓冲机构4包括驱动液压缸401、伸缩剪叉组件402和气囊403,所述伸缩剪叉组件402通过所述驱动液压缸401驱动伸缩,气囊403设于所述伸缩剪叉组件402的自由端,在潜航器3的回收过程中,所述伸缩剪叉组件402伸出,其末端气囊402可用于缓冲潜航器与船舷意外碰撞产生的冲击。
49.如图1所示,潜航器3上包括前后两个起吊点,回收时两个塔式起升机构1上的起吊缆108分别与对应的起吊点连接。
50.本发明的工作原理为:
51.如图4~9所示,下面以潜航器回收为例说明本发明的工作流程。
52.步骤一:塔式起升机构1沿着对应的横向轨道5移动至试验保障船2的回收侧船舷,做好回收准备,试验保障船2以动力定位至与潜航器3距离100~200米处,并侧舷顶流,保证回收侧海流尽量平稳;
53.步骤二:起吊缆绞车释放起吊缆108,起吊缆108与工作艇连接,并由工作艇牵引起吊缆108头端至潜航器3附近,人工将起吊缆108与潜航器3上的起吊点连接;
54.步骤三:碰撞缓冲机构4启动,伸缩剪叉组件402驱动气囊403伸出;
55.步骤四:起吊缆绞车回收起吊缆108并将潜航器3拖曳靠近侧舷,回收过程中潜航器3与碰撞缓冲机构4的气囊403相抵,所述碰撞缓冲机构4的气囊403可缓冲潜航器3与船体侧舷的碰撞冲击,避免潜航器碰撞损坏,并且所述碰撞缓冲机构4的伸缩剪叉组件402会随着潜航器的回收逐渐收缩;
56.步骤五:起吊缆绞车继续回收起吊缆108,并将潜航器3快速提出水面且压紧到对接锁紧装置110下侧实现锁紧固定,此时所述缓冲座109发挥作用减小潜航器3的摆动幅度;
57.步骤六、起重缆绞车启动回收起重缆105并带动起落架104上升,起落架104进而带
动潜航器3垂直提升至预定位置,此过程中起吊缆绞车同步回收起吊缆108,确保潜航器3一直压紧在所述对接锁紧装置110上;
58.步骤七:载体支撑座6沿着纵向轨道7向两侧移动,预留出塔式起升机构1横向移动空间,然后两个塔式起升机构1沿着对应的横向轨道5向后移动至试验保障船3甲板上的预定位置,确保潜航器3下放后可落到载体支撑座6上;
59.步骤八:纵向轨道7上的载体支撑座6向中间移动,然后起重缆105和起吊缆108同时放缆慢慢将潜航器3放在载体支撑座6上并绑扎固定,此时可以将潜航器3转运至指定区域进行维护、维修和上传数据等操作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1