差动转向混合动力无人艇及其转向控制方法与流程
本发明涉及混合动力无人艇,具体涉及一种差动转向混合动力无人艇及其转向控制方法。
背景技术:
1、目前水面无人移动平台有太阳能无人艇、风能无人艇、波浪能无人艇,分别以太阳能、风能和波浪量能驱动平台航行,为了增强驱动能力,提高航行速度,就出现了太阳能与风能混合艇、太阳能与波浪能混合艇。
2、专利cn114013581a公开了一种面向减阻与避碰的可变结构型风光波浪能混合驱动无人艇,其能够充分捕获海洋环境中的风能、太阳能与波浪能,而且具备可变结构的能力,即一方面能够根据海况等级而调整波浪拍动串列水翼的入水与出水,保证高海况下对波浪能充分吸收、低海况下艇体阻力性能良好;另一方面当无人艇靠泊时能够降下太阳能风帆,并收起艇体舷侧外的太阳能板,避免风帆与太阳能板在无人艇靠泊时受到磕碰,具有较好的安全性与可靠性。
3、专利cn106741782a公开了一种基于风能驱动的无人船,包括船体,船体的尾部设有舵,船体内设有航行控制系统,还包括太阳能供电系统、环境感知设备和定位装置;太阳能供电系统包括太阳能电池板和储能装置,储能装置的输出端分别与环境感知设备、定位装置和航行控制系统连接;航行控制系统包括用于根据环境感知设备采集的信息、定位装置的实时定位信息、以及预设的任务重点位置规划路径的船载处理器,以及用于根据船载处理器的结果控制主帆、前帆与风向之间的角度和舵角的pid控制器。该专利利用风能作为驱动力,实现污染物零排放,并能保证长时间续航,通过调节风帆的位置和角度,即使在逆风情况下也能顺利航行。
4、专利cn109263787a公开了一种复合动力无人艇,包括,无人艇本体,的无人艇本体包括一个主船体和主船体两侧对称的一对片体,主船体具有瘦削的船首;连接桥,用于连接主船体和一对片体;铺板,用于将连接桥、主船体上甲板、一对片体的上部连成一个安装平面;风帆,为翼帆结构,包括桅杆和风帆基座,桅杆与风帆基座通过法兰连接,风帆基座固定安装在主船体 的船底中部的纵桁上;设置在无人艇本体上的电力系统、推进系统和控制系统。本发明的复合动力无人艇为具有瘦削船首的穿浪型三体船,能够在风能、电能和化石能之间切换,并且耐波性好、适航性高。
5、但是现有技术的需要使用方向舵来转向,海上漂浮物很容易挂在无人艇上,而出现挂带漂浮物减低航行速度,甚至无法航行的问题。
技术实现思路
1、本发明的目的在于提供一种差动转向混合动力无人艇及其转向控制方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供了一种差动转向混合动力无人艇,包括:艇身,艇身包括两个细长型浮筒,两个浮筒沿水平方向设置,且相互平行,浮筒的尾部均设置有螺旋桨,两个浮筒的尾部均设置有第一电机,两个第一电机分别用于驱动两个所述螺旋桨;太阳能电池板托板,其设置在艇身的上方,太阳能电池板托板上固定设置有太阳能电池板;风帆,风帆包括左风帆和右风帆,左风帆通过转轴设置在其中一个浮筒的前部,右风帆通过转轴设置在另一个浮筒的后部,转轴的顶部和底部分别与太阳能电池板托板和浮筒转动连接;驱动装置,其分别固定设置在转轴的上端,用于控制转轴的旋转角度,并通过转轴分别带动左风帆和右风帆转动至设定方向;以及控制系统,其用于采集风帆的方向、风向、无人艇的经纬度、无人艇艇体的指向数据,并基于所采集的数据进行无人艇的转向控制。
3、在一优选实施方式中,左风帆和右风帆的尺寸一致,且左风帆距浮筒头部的距离与右风帆距浮筒尾部的距离相同,转轴分别位于左风帆和右风帆的中部。
4、在一优选实施方式中,驱动装置包括蜗轮、蜗杆和第二电机,其中,蜗轮设置在转轴上,蜗杆与蜗轮相啮合,第二电机与蜗杆连接,以驱动蜗杆旋转。
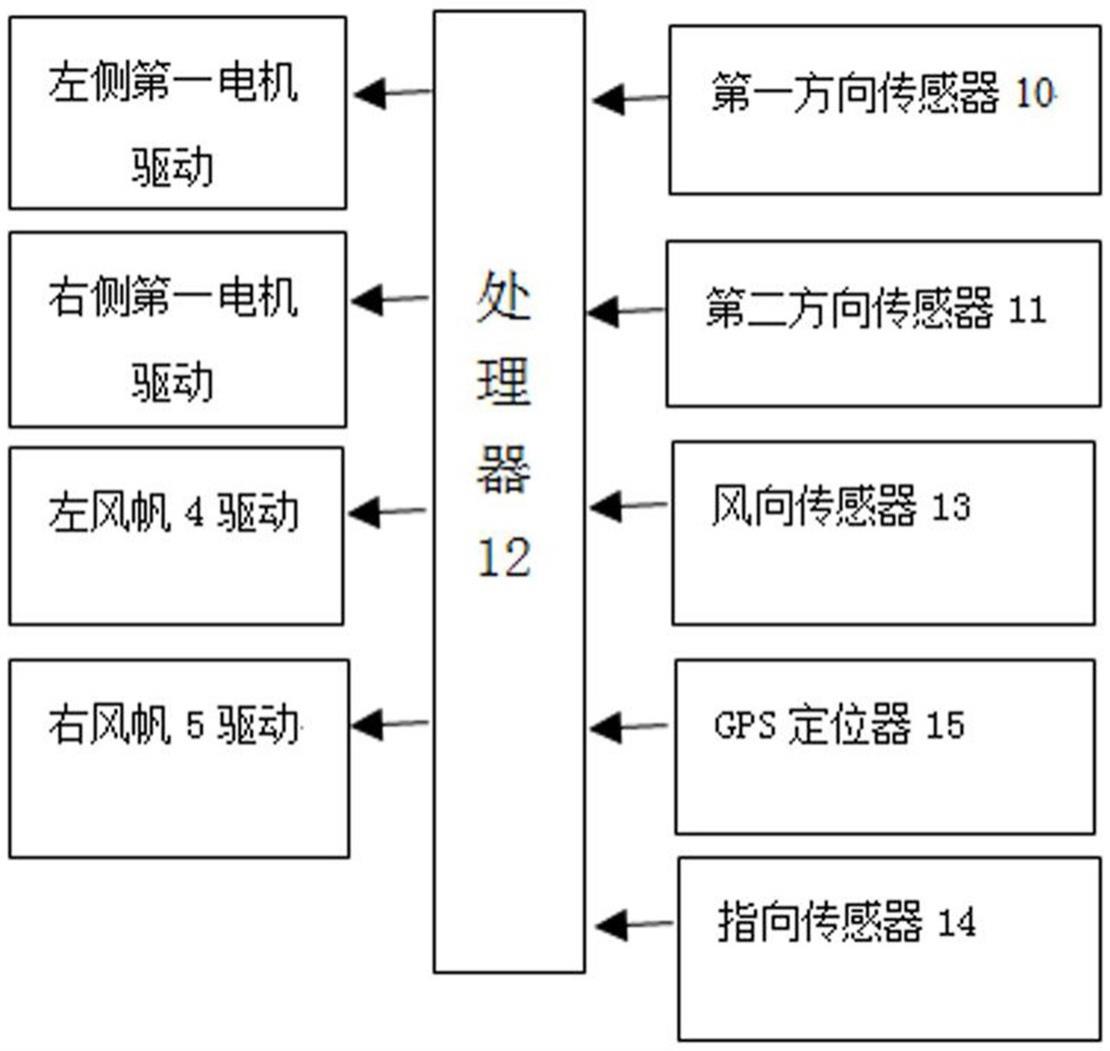
5、在一优选实施方式中,控制系统包括第一方向传感器、第二方向传感器、处理器、风向传感器、指向传感器和gps定位器,第一方向传感器和第二方向传感器分别与两个驱动装置的螺杆相连接,利用相应蜗杆的圈数分别反算两个转轴旋转的角度,风向传感器固定设置在太阳能电池板的中部上方,指向传感器设置在太阳能电池板托板的侧面,用于给出无人艇艇身的方向,风向传感器、指向传感器、第一方向传感器、第二方向传感器、gps定位器、第一电机以及第二电机分别与处理器信号连接。
6、在一优选实施方式中,浮筒的中部设置有水舱,水舱侧面设置有进水电动阀和排水泵,太阳能电池板托板的体积为水舱体积的2倍。
7、本发明还提供了一种上述差动转向混合动力无人艇的转向控制方法,包括如下步骤:
8、s1、处理器分别读取风帆的方向数据、风向数据、无人艇的经纬度数据、无人艇艇身的指向数据;
9、s2、计算无人艇的航向;
10、s3、计算航行时风帆设定方向;
11、s4、控制风帆转到设定方向,并通过控制两个第一电机进行转向控制,使无人艇艇身指向航向;或者通过控制左风帆和右风帆的角度进行转向控制,使无人艇艇身指向航向;
12、s5、回到步骤s1;
13、其中,步骤s4中,控制风帆转到设定方向,并通过控制两个第一电机进行转向控制,包括:s41、通过驱动装置控制风帆转到设定方向,s42、通过分别控制两个第一电机达到不同的转速,产生左右推力差,使无人艇转向;
14、通过控制左风帆和右风帆的角度进行转向控制,使无人艇艇身指向航向,包括:s43、通过驱动装置控制左风帆转到设定方向,s44、通过驱动装置控制右风帆转到设定方向,通过左风帆和右风帆与风向的夹角不一致所产生的左右旋转力矩不相等,使无人艇艇身指向航向,如果无人艇指向与航向一致,跳过这一步;s45、控制左风帆和右风帆方向相同,且产生推力。
15、在一优选实施方式中,步骤s1中,处理器从第一方向传感器和第二方向传感器分别读取左风帆和右风帆的方向数据,从风向传感器中读取风向数据,从gps定位器中读取无人艇的经纬度数据,并利用两个时刻的经度和纬度计算出航向,从指向传感器中读取无人艇艇身的指向数据;
16、其中,从gps定位器中读取无人艇的经纬度数据,并利用两个时刻的经度和纬度计算出航向包括:(1)计算当前点和终点两点间的经度差值和纬度差值进而得到航向角;(2)计算当前点和前一点两点间的经度差值和纬度差值进而得到实际航向角;(3)计算航向角与实际航向角的差值da,da决定无人艇转向,如果航向角大于实际航向角,即da>0,无人艇就需要左转,如果航向角小于实际航向角,即da<0,无人艇就需要右转。
17、在一优选实施方式中,通过控制两个第一电机转速来实现转向控制,控制量为:
18、dd=k1×da+k2(da-da1)/(t1-t2)
19、其中,k1、k2是控制系数,通过调试试验获得,da为t2时刻航向角与实际航向角的差值,da1为t1时刻航向角与实际航向角的差值,t1、t2分别是相邻近的两个时刻,送给两个第一电机的控制量分别为dd和-dd。
20、在一优选实施方式中,通过控制左风帆和右风帆的角度进行转向控制时,控制量为:
21、ddd= kk1×da+kk2(da-da1)/(t1-t2)
22、其中,kk1、kk2是控制系数,通过调试试验获得,da为t2时刻航向角与实际航向角的差值,da1为t1时刻航向角与实际航向角的差值,t1、t2分别是相邻近的两个时刻,送给两个第二电机的控制量分别为ddd和-ddd。
23、在一优选实施方式中,还包括:当无人艇遇到大风时,如风速大于等于20m/s,则打开进水电动阀,水舱进水,浮筒浮力降低,无人艇下沉;当风速减小后,则开启排水泵,将水舱的水排出,无人艇浮起来,其中,太阳能电池板托板的体积为水舱体积的2倍,当无人艇下沉后,太阳能电池板托板的上半部分保持在水面以上,保证太阳能电池板始终在水面以上。
24、与现有技术相比,本发明的有益效果是:本发明可以采用电机螺旋桨推动力差动或者风帆动力差动转向或者两者结合,可以省去方向舵,这样既减少了机械结构,提高了可靠性,又减少了海上挂漂浮物的可能性,从而防止挂带漂浮物而降低航行速度,甚至无法航行的问题。提高了无人艇的冗余度,其中一种动力发生故障,仍能航行。本发明将太阳能电池板设置在风帆之上,太阳能电池板不仅不会被风帆遮挡,而且风帆夹在太阳能电池板托板与水之间,增加了风帆的气动稳定性。本发明还设置了水舱、进水电动阀和排水泵,风帆能够随艇下沉,沉入水中,从而避免了强风时,风力对风帆以及无人艇的破坏,提高了安全性。
- 还没有人留言评论。精彩留言会获得点赞!