基于环量控制技术的多旋翼飞行器以及控制方法与流程
1.本发明涉及飞行器领域,尤其涉及基于环量控制技术的多旋翼飞行器以及控制方法。
背景技术:
2.多旋翼飞行器已经广泛应用于军用与民用领域。军用无人机可避免人员伤亡,使用约束少并且隐蔽性好、效费比高,在现代战争中的地位和作用日渐突出;随着先进技术的广泛应用,无人机正在情报侦察、军事打击、信息对抗、空中预警等各方面发挥越来越大的作用。在民用领域,民用无人机的市场规模及应用领域也在迅速增长;民用无人机目前应用于航拍、电力巡检、环境监测保护、物流运输、灾后救援等多个领域。
3.由于多旋翼无人机操纵简单,操控器四个遥感操作对应无人机的前后、左右、上下和偏航方向的运动,使用者很快就能掌控其飞行,且外多旋翼无人机结构简单、可靠性高,非专业人士也可维护,因此多旋翼无人机更受市场青睐,得以迅速发展。
4.而传统的多旋翼飞行器提供前进动力都需要倾斜桨盘,使得整机的废阻面积增大,前飞阻力升高,飞行速度很难提升。
技术实现要素:
5.(一)发明目的
6.为解决背景技术中存在的技术问题,本发明提出基于环量控制技术的多旋翼飞行器以及控制方法,可以向任意方向前飞时不需要倾斜桨盘,能够有效的降低前飞的阻力,极大的提高了飞行的速度,效率高,适合广泛推广。
7.(二)技术方案
8.本发明提供了基于环量控制技术的多旋翼飞行器以及控制方法,包括机体,所述机体包括多个内部为涵道结构的机臂,多个所述机臂沿机体的中心点对称分布,所述机臂上设置有多旋翼机构,所述多旋翼机构用于控制机体的升降,同时产生升力和下洗流,所述涵道内还设置有涵道风扇,所述涵道风扇用于向涵道内吹入空气,任一对称所述机臂的一侧形成有出风狭缝,所述出风狭缝与机臂外切线形成狭缝迎角,所述涵道风扇吹出的气流经出风狭缝吹出涵道,与所述机臂之间形成出口喷射角,吹出涵道的气流和下洗流与机臂之间形成环量气流,所述环量气流与机臂另一侧的下洗流之间形成压强差,所述压强差用于推动机体沿水平方向前进,所述机体上还设置有用于供涵道进风的进风口。
9.作为本发明的进一步优化:所述机体还包括有机身,所述机臂沿机身的外圈阵列设置,所述机臂的两端分别与机身和多旋翼机构连接。
10.作为本发明的进一步优化:所述进风口设置在所述机身上。
11.作为本发明的进一步优化:所述机体还包括起落脚架,所述起落脚架与机身的底部可拆式连接。
12.作为本发明的进一步优化:所述进风口设置在机臂上。
13.作为本发明的进一步优化:所述多旋翼机构包括固定件、驱动件座,第一驱动件以及与第一驱动件输出轴固定连接的桨叶,所述驱动件座通过所述固定件与机臂固定连接,所述第一驱动件固定设置于驱动件座上,所述第一驱动件用于控制桨叶转动。
14.作为本发明的进一步优化:所述涵道风扇内还设置有第二驱动件,所述第二驱动件用于控制涵道风扇转动。
15.作为本发明的进一步优化:所述机体内还设置有控制器以及与蓄电池,所述控制器用于控制蓄电池提供给第一驱动件和第二驱动件的功率,以使所述第一驱动件和第二驱动件分别控制桨叶和涵道风扇的转动速度。
16.作为本发明的进一步优化:所述出口喷射角与所述狭缝迎角之间互补。
17.基于环量控制技术的多旋翼飞行器以及控制方法,提供如权利要求1-9中所述多旋翼飞行器,包括步骤为:
18.s1、控制器控制蓄电池为第一驱动件提供电能,以使第一驱动件控制多旋翼机构旋转,产生升力以及下洗流,控制多旋翼飞行器上升;
19.s2、控制器控制蓄电池为第二驱动件提供相等的电能,以使第二驱动件控制涵道风扇向涵道内吹出等量空气,涵道内的空气经出风狭缝向外吹出,与下洗流之间形成环量气流,控制多旋翼飞行器前飞;
20.s3、控制器控制蓄电池为第二驱动件提供不相等的电能,以使第二驱动件控制涵道风扇向涵道内吹出不等量空气,涵道内的空气经出风狭缝向外吹出,与下洗流之间形成环量气流,控制多旋翼飞行器转动。
21.与现有技术相比,本发明的上述技术方案具有如下有益的技术效果:
22.本装置通过安装起落架、蓄电池、机臂、出风狭缝以及多旋翼机构等结构,其中基于科恩达效应,流体经过壁面时有贴着其流动的倾向,在其中两个机臂内安装涵道风扇,并在前进方向开两个出风狭缝,当多旋翼飞行器前飞时,涵道风扇运行,空气从机臂的出风狭缝处流出,因为科恩达效应以及选定合适狭缝迎角和出口喷射角,通过出风狭缝送出的空气会贴着机臂形成环量气流,此时机臂前壁与后壁形成压强差,机臂获得前进的拉力,涵道风扇由独立的第二驱动件控制,通过改变第二驱动件速度控制前进的速度,两个驱动件的差速控制机臂的旋转。本发明提出基于环量控制技术的多旋翼飞行器以及控制方法,可以向任意方向前飞时不需要倾斜桨盘,能够有效的控制前飞的速度以及转向动作,效率高,适合广泛推广。
附图说明
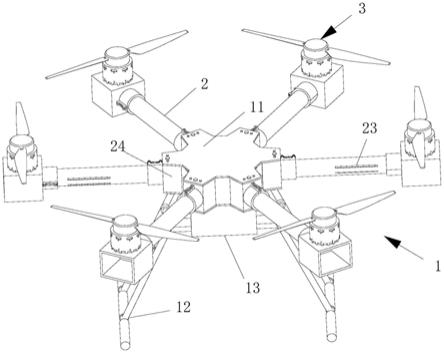
23.图1为本装置整体结构示意图;
24.图2为本装置机臂结构示意图;
25.图3为本装置风向流动结构示意图。
26.附图标记:1、机体;11、机身;12、起落架;13、蓄电池;2、机臂;21、涵道;22、涵道风扇;23、出风狭缝;24、第二驱动件;3、多旋翼机构;31、固定件;32、驱动件座;33、第一驱动件;34、桨叶。
具体实施方式
27.为使本发明的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本发明进一步详细说明。应该理解,这些描述只是示例性的,而并非要限制本发明的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。
28.通过图1-3所示,本发明提出的基于环量控制技术的多旋翼飞行器以及控制方法,包括机体1,机体1包括多个内部为涵道21结构的机臂2,机臂2共有六个,六个机臂2沿机体1的中心点对称分布,机臂2上设置有多旋翼机构3,多旋翼机构3用于控制机体1的升降,同时产生升力和下洗流,下洗流会经过机臂2的两侧,涵道21内还设置有涵道风扇22,涵道风扇22用于向涵道21内吹入空气,任一对称机臂2的一侧形成有出风狭缝23,出风狭缝23共有两个,两个出风狭缝23均设置在机臂2的同一侧,一个位于机臂2的上侧,另一个位于机臂2的下侧,两个出风狭缝23之间与机臂2的中心轴线的夹角为60
°
,位于上侧的出风狭缝23与竖直方向的夹角为80
°
,出风狭缝23与机臂2外切线形成狭缝迎角,狭缝迎角为20
°
~40
°
,如图3中α所示,涵道风扇22吹出的气流经出风狭缝23吹出涵道21,与机臂2之间形成出口喷射角,如图3中β所示,出口喷射角与狭缝迎角之间互补,吹出涵道21的气流和下洗流与机臂2之间形成环量气流,环量气流与机臂2另一侧的下洗流之间形成压强差,压强差用于推动机体1沿水平方向前进,机体1上还设置有用于供涵道进风的进风口,进风口设置在机身11上或设置在机臂2上,通过设置进风口能够使出风狭缝23出的气流稳定。
29.通过图1-3所示,机体1还包括有机身11,机臂2沿机身11的外圈阵列设置,机臂2的两端分别与机身11和多旋翼机构3连接,机体1还包括起落脚架,起落脚架与机身11的底部可拆式连接,在起飞时,将起落脚架安装在机身11的底部,用于支撑机体1,当不使用时需要将多旋翼飞行器收起,这时将起落脚架从机身11上拆卸下来,便于对多旋翼飞行器进行摆放。
30.通过图1-3所示,多旋翼机构3包括固定件31、驱动件座32,第一驱动件33以及与第一驱动件33输出轴固定连接的桨叶34,驱动件座32通过固定件31与机臂2固定连接,第一驱动件33固定设置于驱动件座32上,第一驱动件33用于控制桨叶34转动,通过启动第一驱动件33能够控制桨叶34进行转动,而桨叶34转动能够产生升力,进而控制多旋翼飞行器的升降。
31.通过图1-3所示,涵道风扇22内还设置有两个第二驱动件24,两个第二驱动件24分别设置在开设有出风狭缝23的两侧机臂2内,第二驱动件24用于控制涵道风扇22转动,涵道风扇22独立工作,在多旋翼飞行器悬停或垂直起降时涵道风扇22可以关闭。
32.通过图1-3所示,机体1内还设置有控制器以及与蓄电池13,控制器用于控制蓄电池13提供给第一驱动件33和第二驱动件24的功率,以使第一驱动件33和第二驱动件24分别控制桨叶34和涵道风扇22的转动速度,第一驱动件33的功率大小能够控制桨叶34转动的速度,进而控制多旋翼飞行器的起降速度,而第二驱动件24独立控制涵道风扇22,通过改变第二驱动件24的功率能够控制多旋翼飞行器前进的速度,在多旋翼飞行器水平直线运动时,通过控制器控制两侧的第二驱动件24的功率相同,在多旋翼飞行器水平转向时,通过控制两侧的第二驱动件24产生功率差,形成差速,控制机臂2进行旋转。
33.基于环量控制技术的多旋翼飞行器以及控制方法,包括步骤为:
34.s1、控制器控制蓄电池13为第一驱动件33提供电能,以使第一驱动件33控制多旋翼机构3旋转,产生升力以及下洗流,控制多旋翼飞行器上升;
35.s2、控制器控制蓄电池13为第二驱动件24提供相等的电能,以使第二驱动件24控制涵道21风扇向涵道21内吹出等量空气,涵道21内的空气经出风狭缝23向外吹出,与下洗流之间形成环量气流,控制多旋翼飞行器前飞;
36.s3、控制器控制蓄电池13为第二驱动件24提供不相等的电能,以使第二驱动件24控制涵道21风扇向涵道21内吹出不等量空气,涵道21内的空气经出风狭缝23向外吹出,与下洗流之间形成环量气流,控制多旋翼飞行器转动。
37.工作原理:本多旋翼飞行器基于科恩达效应,流体经过壁面时有贴着其流动的倾向,在其中两个机臂2内安装涵道风扇22,并在前进方向开两个出风狭缝23,当多旋翼飞行器前飞时,涵道风扇22运行,空气从机臂2的出风狭缝23处流出,因为科恩达效应以及选定合适狭缝迎角和出口喷射角,通过出风狭缝23送出的空气会贴着机臂2形成环量气流,此时机臂2前壁与后壁形成压强差,机臂2获得前进的拉力,涵道风扇22由独立的第二驱动件24控制,通过改变第二驱动件24速度控制前进的速度,两个驱动件的差速控制机臂2的旋转。
38.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
39.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
40.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1