共轴双电机微型无人机的基于正交圆弧齿条旋翼矢量操纵机构的制作方法
:
1.本发明涉及一种共轴双电机微型无人机的操纵机构,尤其涉及一种共轴双电机微型无人机的基于正交圆弧齿条旋翼矢量操纵机构,其属于无人机系统领域。
背景技术:
2.目前共轴双旋翼无人机电机轴线矢量的倾转,传统上都采用舵机驱动摇臂与连杆,再拉动电机摇臂使电机偏转。对于微型共轴双旋翼来说,舵机作动的摇臂、连杆与电机摇臂结构都较细,刚度小,无人机电机运转时,容易发生振动;并且连接孔间歇较大,操纵偏转精度较差。
3.另一方面,筒状机体的微型共轴双旋翼无人机,机体直径和内部空间有限,传统的摇臂、连杆必须布置在电机倾转环的外侧,受机体限制,很难设置,或无法正常运转。
4.因此,确有必要对现有技术进行改进以解决现有技术之不足。
技术实现要素:
5.本发明是为了解决上述现有技术存在的问题而提供一种共轴双电机微型无人机的基于正交圆弧齿条旋翼矢量操纵机构,其不但无振动、控制精确高、可靠性强,而且体积小,结构紧凑,不占据机体内部格外空间。
6.本发明所采用的技术方案有:一种共轴双电机微型无人机的基于正交圆弧齿条旋翼矢量操纵机构,包括旋翼俯仰矢量操纵机构、旋翼横向矢量操纵机构、操纵机构控制系统、支撑框架以及共轴双电机,所述旋翼俯仰矢量操纵机构包括俯仰倾转机构和第一舵机,所述旋翼横向矢量操纵机构包括横向倾转机构和第二舵机,所述操纵机构控制系统安装于支撑框架之下;
7.所述俯仰倾转机构的上部与安装于共轴双电机外部的外环体相对两侧固定连接,所述外环体另相对两侧设有与其固定连接的外环体转轴,所述横向倾转机构的上部装有滚珠轴承,所述外环体转轴与横向倾转机构通过滚珠轴承联接,所述滚珠轴承外安装有轴承上盖;
8.所述横向倾转机构的上部连接有一圆环结构,所述圆环结构与横向倾转机构的滚珠轴承下半部固定连接,所述圆环结构与支撑框架两侧铰支;
9.所述俯仰倾转机构的下表面安装有以共轴双电机中心为圆心的上圆弧齿条,所述上圆弧齿条与安装在横向倾转机构下段上表面的第一舵机齿轮啮合,所述横向倾转机构与俯仰倾转机构呈正交位置,所述横向倾转机构下段位于俯仰倾转机构之下;
10.所述横向倾转机构下段下表面安装有以共轴双电机中心为圆心的下圆弧齿条,所述下圆弧齿条与安装在支撑框架下部上表面的第二舵机齿轮啮合;
11.所述操纵机构控制系统分别与第一舵机、第二舵机以及共轴双电机的电调通过电线相连,所述操纵机构控制系统根据无人机飞行姿态和导航需求,其中的微处理器芯片分
别控制第一舵机和第二舵机,以实现旋翼轴线作俯仰和横向矢量偏转。
12.进一步地,所述俯仰倾转机构的上部两端与外环体固定连接,下部基体为以共轴双电机中心为圆心的圆弧段,两侧为竖直直线段与下部圆弧段以一阶导数连续曲线连接成形。
13.进一步地,所述上圆弧齿条的形状模数与第一舵机齿轮啮合,上圆弧齿条的齿数以每转动1个齿,俯仰倾转机构转动0.5
°‑1°
角度。
14.进一步地,所述横向倾转机构的高度大于俯仰倾转机构,所述横向倾转机构的下部基体为以共轴双电机中心为圆心的圆弧段。
15.进一步地,所述下圆弧齿条的形状模数与第二舵机齿轮啮合,下圆弧齿条的齿数以每转动1个齿,横向倾转机构转动0.5
°‑1°
角度。
16.进一步地,所述支撑框架的底部为一圆环体,圆环体两侧固定有两个竖直支撑杆,两侧竖直支撑杆上部设计为带孔的u形支撑端,u形支撑端与横向倾转机构上部的圆环结构以转轴铰支联接。
17.本发明具有如下有益效果:
18.(1)无需传统舵机作动操纵的摇臂、连杆机构,减少操纵元器件占据的空间;
19.(2)舵机齿轮与圆弧齿条的传动无间隙,显著提高旋翼矢量偏转的精度和可靠性;
20.(3)体积小、结构紧凑、运行可靠、控制精度高。
附图说明:
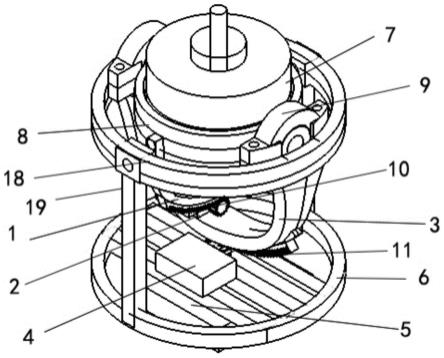
21.图1为本发明共轴双电机微型无人机的基于正交圆弧齿条旋翼矢量操纵机构示意图。
22.图2为本发明的共轴双电机和外环体与支撑框架轴承联接结构示意图。
23.图3(a)为本发明的以共轴双电机中心为圆心的上圆弧齿条示意图。
24.图3(b)为本发明的以共轴双电机中心为圆心的下圆弧齿条示意图。
25.图4为本发明的俯仰倾转机构与横向倾转机构呈正交位置设置及其与舵机齿轮啮合示意图。
26.图5为本发明的操纵机构控制系统组成及其操纵流程框图。
27.图6为本发明的共轴双电机的旋翼矢量操纵机构运转示意图。
28.图7为本发明的基于旋翼矢量操纵机构的共轴双电机微型无人机示意图。
29.其中:
30.1-俯仰倾转机构;2-第一舵机;3-横向倾转机构;4-第二舵机;5-操纵机构控制系统;6-支撑框架;7-共轴双电机;8-外环体;9-轴承上盖;10-上圆弧齿条;11-下圆弧齿条;12-第一舵机齿轮;13-第二舵机齿轮;14-第一旋翼;15-第二旋翼;16-机体外壳,17-外环体转轴;18-圆环结构,19-竖直支撑杆。
具体实施方式:
31.下面结合附图对本发明作进一步的说明。
32.本发明共轴双电机微型无人机的基于正交圆弧齿条旋翼矢量操纵机构,包括旋翼俯仰矢量操纵机构、旋翼横向矢量操纵机构、操纵机构控制系统5和支撑框架6,旋翼俯仰矢
量操纵机构包括俯仰倾转机构1和第一舵机2,旋翼横向矢量操纵机构包括横向倾转机构3和第二舵机4,操纵机构控制系统5安装于支撑框架6之下。
33.俯仰倾转机构1的上部与共轴双电机7的外环体8相对两侧固定连接,而共轴双电机外环体8另相对两侧设有与其固定连接的外环体转轴17。横向倾转机构3的上部装有滚珠轴承,外环体转轴17与横向倾转机构3通过滚珠轴承联接,滚珠轴承外安装有轴承上盖9以便于装配。
34.横向倾转机构3的上部连接有一圆环结构18,圆环结构18与横向倾转机构3的滚珠轴承下半部固定连接,圆环结构18与支撑框架6两侧铰支。
35.俯仰倾转机构1的下表面安装有以共轴双电机7中心为圆心的上圆弧齿条10,上圆弧齿条10与安装在横向倾转机构3下段上表面的第一舵机齿轮12啮合。横向倾转机构3与俯仰倾转机构1呈正交位置,并且横向倾转机构3下段位于俯仰倾转机构1之下。
36.横向倾转机构3下段下表面安装有以共轴双电机中心为圆心的下圆弧齿条11,下圆弧齿条11与安装在支撑框架6下部上表面的第二舵机齿轮13啮合。
37.操纵机构控制系统5分别与第一舵机2、第二舵机4和共轴双电机7的电调通过电线相连,操纵机构控制系统5根据无人机飞行姿态和导航需求,其微处理器芯片以及软件分别控制第一舵机2和第二舵机4,以实现双旋翼轴线作俯仰和横向矢量偏转。
38.本发明的共轴微型无人机动力装置可采用两个无刷电动机(两个无刷电动机作共轴双电机上下设置,共轴双电机7外部安装有外环体8,外环体8与共轴双电机7固定连接,外环体8的两侧设有两个固定连接的转轴17。
39.本发明中的俯仰倾转机构1,其上部两端与外环体8固定连接,其下部基体为以共轴双电机7中心为圆心的圆弧段,两侧为竖直直线段与下部圆弧段以一阶导数连续曲线连接成形。单独研制一个与俯仰倾转机构1的下部基体圆弧段相吻合的上圆弧齿条10,上圆弧齿条10的机体形状是以共轴双电机7中心为圆心半径r1的圆弧(图3(a));上圆弧齿条10与俯仰倾转机构1的下部基体以固定方式(如螺孔与螺丝)连接。上圆弧齿条10的形状模数应能与第一舵机齿轮12啮合,上圆弧齿条10的齿数以每转动1个齿,俯仰倾转机构1转动0.5
°‑1°
角度为宜。
40.本发明中的横向倾转机构3,其上部两端设计为带有轴承上盖9的支撑端,横向倾转机构3上部两端与共轴双电机7的外环体转轴17以滚珠轴承及其轴承上盖9联接,由于共轴双电机7的外环体转轴17长度大于横向倾转机构3上部两端直径,所以,设计有轴承上盖9,便于横向倾转机构3与共轴双电机7的外环体转轴17的装配。
41.横向倾转机构3的高度大于俯仰倾转机构1,横向倾转机构3的下部基体为以共轴双电机7中心为圆心的圆弧段,显然其圆弧半径r2大于上圆弧齿条10的半径r1,单独设计一个与横向倾转机构3下部基体圆弧段相吻合的下圆弧齿条11,下圆弧齿条11的机体形状是以共轴双电机7中心为圆心的圆弧(图3(b)),下圆弧齿条11与横向倾转机构3下部基体以固定方式(如螺孔与螺丝)连接。下圆弧齿条11的形状模数应能与第二舵机齿轮13啮合,下圆弧齿条11的齿数以每转动1个齿,横向倾转机构3转动0.5
°‑1°
角度为宜。横向倾转机构3上部连接有一圆环结构18,圆环结构18与横向倾转机构3的滚珠轴承下半部固定连接。横向倾转机构3两侧为竖直直线段与下部圆弧段以一阶导数连续曲线连接成形。
42.上圆弧齿条10、下圆弧齿条11也可分别与俯仰倾转机构下部基体、横向倾转机构
下部基体做一体化加工,只要加工齿条时定位好圆弧齿条的圆心、半径位置以及下部基体的水平定位,一体化加工的好处是减少齿条的安装。
43.共轴双电机微型无人机的基于正交圆弧齿条旋翼矢量操纵机构的下部设计有支撑框架6,支撑框架的底部为一圆环体,圆环体两侧固定有两个竖直支撑杆19,两侧竖直支撑杆19上部设计为带孔的u形支撑端,u形支撑端与横向倾转机构3上部的圆环结构18以转轴铰支联接。俯仰倾转机构1和横向倾转机构3是以正交位置安装在支撑框架6上的。支撑框架6与无人机是固定连接的,因此,也是共轴双电机的旋翼矢量操纵机构的支撑。
44.操纵机构控制系统5安装在支撑框架6的底部,是“不动”的,操纵机构控制系统通过外接两个无刷电动机(即第一电动机和第二电动机)的电调(即第一电调和第二电调)来控制两个无刷电动机的“油门”,电调即电子调速器(图5)。操纵机构控制系统5通过电线连接控制第一舵机来操纵俯仰倾转机构的转动,以实现第一旋翼的俯仰矢量倾转,需要注意的是第一舵机是安装在横向倾转机构上,因此是有“移动”的,控制电线应适当放长。操纵机构控制系统通过电线连接控制第二舵机来操纵横向倾转机构的转动,以实现第二旋翼的横向矢量倾转,而第二舵机是安装在支撑框架6上的,因此是与的操纵机构控制系统没有相对移动,控制电线长可固定。
45.图5是操纵机构控制系统组成及其操纵流程框图,包括三轴陀螺仪、三轴加速度计、三轴磁强计、气压高度计、卫星导航接收机和微处理器芯片。三轴陀螺仪和三轴加速度计感受飞行器的运动角速率和沿三个轴向的加速度,以反馈飞行器运动姿态信息,同时也用于导航姿态控制;气压高度计测试以大气气压为基础的飞行高度;飞行器在空中的绝对方向需要利用三轴磁强计测量航向;卫星导航接收机用于测试飞行器的位置坐标;所有这些传感器数据都通过微处理器芯片进行信息融合和计算处理,然后通过控制第一舵机、第二舵机控制俯仰倾转机构和横向倾转机构;通过控制第一电调、第二电调分别控制第一电动机和第二电动机,进而控制第一旋翼和第二旋翼的转速。当然操纵机构控制系统的运行需要由电源提供能源。
46.本发明正是根据微型无人机对于体积尺寸的严格要求而提出的。图7给出了旋翼矢量操纵机构与两个电动机、两个旋翼及在无人机机体中的基本布置关系,本发明虽然针对微型无人机设计的,但是没有给出尺寸,只是画出各零部件之间的相对大小比例,因此原则上也适用于大一些的共轴双电机无人机的设计,并且本发明在无人机内部空间布置和操纵可靠性、精度方面都有其优点。
47.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下还可以作出若干改进,这些改进也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1