一种大比例尺多旋翼无人机航磁探测装置的制作方法
1.本实用新型属于磁法勘探技术领域,具体涉及一种大比例尺多旋翼无人机航磁探测装置。
背景技术:
2.航空磁力测量又称航空磁测或航空磁力勘探,是航空物探方法中使用时间最早、最成熟和最多的磁测方法,是将航空磁力仪及其配套的辅助设备装载在飞行器上,在测量地区上空按照预先设定的测线和高度对地磁场强度或梯度进行测量的地球物理方法。
3.现阶段,无人机航空磁测技术因其部署便捷、成本低、智能化、高精度等特点,其研发与应用受到世界各航空地球物理公司和单位的广泛关注,可广泛应用于地质矿产勘查、考古以及军事工事探测、反潜探测和未爆弹药探测等领域,特别是可以在陡峭山区、沼泽雨林、湖泊海洋等传统物探工作者难以进入的环境进行物探测量,效率是传统人工物探的几十倍。且相比过去大型载人飞机航空物探,精度更高,风险更低,在未来市场前景十分广阔。
4.但是,传统的长杆式连接方式,基本都是直接安装到多旋翼无人机的机腹下方,容易造成远端的光泵探头在无人机起降过程中触地损坏。另外,无人机航空磁测过程中,由于无人机在飞行过程中自身姿态变化所产生的磁场,对航空磁力仪测量的数据造成干扰,特别是在空中大风等不利条件作业时,容易产生航磁数据转向差的影响。
技术实现要素:
5.为此,本实用新型提供一种大比例尺多旋翼无人机航磁探测装置,以解决传统方案存在的附属件容易触地损坏,稳定性差,不能保证高精度航磁数据获取问题。
6.为了实现上述目的,本实用新型提供如下技术方案:一种大比例尺多旋翼无人机航磁探测装置,包括无人机组件、长杆组件和航空磁力仪设备;
7.所述无人机组件包括无人机架,所述无人机架连接有支撑机构;所述长杆组件包括碳纤维杆;所述航空磁力仪设备包括磁力仪主机、定位设备和钾光泵探头;
8.所述碳纤维杆的一端和所述支撑机构连接,所述磁力仪主机和定位设备均固定于所述碳纤维杆上,所述钾光泵探头固定在所述碳纤维杆远离所述无人机组件的一端;
9.所述无人机组件、所述长杆组件和所述航空磁力仪设备的整体重心处于所述无人机组件上。
10.作为大比例尺多旋翼无人机航磁探测装置的优选方案,所述无人机组件还包括起落架和旋翼机构,所述起落架连接在所述无人机架的底部;
11.所述无人机架包括呈井字型排布的机架碳管,所述旋翼机构分布在所述机架碳管的外端。
12.作为大比例尺多旋翼无人机航磁探测装置的优选方案,所述起落架对所述无人机组件形成支撑,并使所述航空磁力仪设备脱离于地面。
13.作为大比例尺多旋翼无人机航磁探测装置的优选方案,所述无人机架的中心设有
底板,所述底板上分布有电池组,所述电池组与所述旋翼机构电连接。
14.作为大比例尺多旋翼无人机航磁探测装置的优选方案,所述支撑机构设有两组,每组所述支撑机构包括两幅支撑碳管,两幅所述支撑碳管和所述机架碳管呈三角形排布。
15.作为大比例尺多旋翼无人机航磁探测装置的优选方案,所述支撑碳管的一端和所述机架碳管连接,所述支撑碳管的另外一端铰接有固定套,所述碳纤维杆穿插入所述固定套中。
16.作为大比例尺多旋翼无人机航磁探测装置的优选方案,所述定位设备采用gps定位终端或北斗定位终端。
17.作为大比例尺多旋翼无人机航磁探测装置的优选方案,所述碳纤维杆上还连接有3d打印仪器主机固定盒。
18.作为大比例尺多旋翼无人机航磁探测装置的优选方案,所述航空磁力仪设备还配置有姿态传感器和激光雷达高度计,所述姿态传感器用于获取所述航空磁力仪设备的姿态数据,所述激光雷达高度计用于获取所述航空磁力仪设备的高度数据。
19.本实用新型具有如下优点:设有无人机组件、长杆组件和航空磁力仪设备;无人机组件包括无人机架,无人机架连接有支撑机构;长杆组件包括碳纤维杆;航空磁力仪设备包括磁力仪主机、定位设备和钾光泵探头;碳纤维杆的一端和支撑机构连接,磁力仪主机和定位设备均固定于碳纤维杆上,钾光泵探头固定在碳纤维杆远离无人机组件的一端;无人机组件、长杆组件和航空磁力仪设备的整体重心处于无人机组件上。本实用新型利用长杆组件将航空磁力仪设备中的钾光泵探头放置在碳纤维杆的远端,碳纤维杆的另一头固定到无人机架,可以此避免无人机在飞行过程中自身姿态变化所产生的磁场对航空磁力仪测量的数据造成干扰;同时保证稳定的姿态,减少航磁数据转向差的影响;在长杆的机身固定位置设有支撑机构,一方面极大地方便了平时安装拆卸,另一方面,避免了过去的长杆式连接方式直接安装到多旋翼无人机的机腹下方而造成远端的钾光泵探头在无人机起降过程中触地损坏。
附图说明
20.为了更清楚地说明本实用新型的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引申获得其他的实施附图。
21.本说明书所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本实用新型可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本实用新型所能产生的功效及所能达成的目的下,均应仍落在本实用新型所揭示的技术内容能涵盖的范围内。
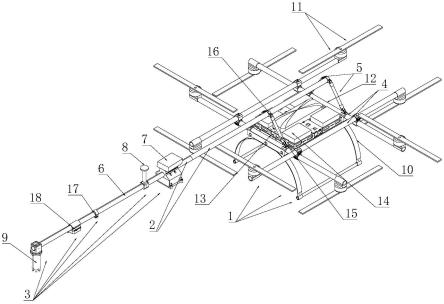
22.图1为本实用新型实施例中提供的大比例尺多旋翼无人机航磁探测装置立体结构示意图;
23.图2为本实用新型实施例中提供的大比例尺多旋翼无人机航磁探测装置侧视图。
24.图中,1、无人机组件;2、长杆组件;3、航空磁力仪设备;4、无人机架;5、支撑机构;
6、碳纤维杆;7、磁力仪主机;8、定位设备;9、钾光泵探头;10、起落架;11、旋翼机构;12、机架碳管;13、底板;14、电池组;15、支撑碳管;16、固定套;17、姿态传感器;18、激光雷达高度计。
具体实施方式
25.以下由特定的具体实施例说明本实用新型的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本实用新型的其他优点及功效,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
26.参见图1和图2,本实用新型实施例提供一种大比例尺多旋翼无人机航磁探测装置,包括无人机组件1、长杆组件2和航空磁力仪设备3;
27.所述无人机组件1包括无人机架4,所述无人机架4连接有支撑机构5;所述长杆组件2包括碳纤维杆6;所述航空磁力仪设备3包括磁力仪主机7、定位设备8和钾光泵探头9;
28.所述碳纤维杆6的一端和所述支撑机构5连接,所述磁力仪主机7和定位设备8均固定于所述碳纤维杆6上,所述钾光泵探头9固定在所述碳纤维杆6远离所述无人机组件1的一端;
29.所述无人机组件1、所述长杆组件2和所述航空磁力仪设备3的整体重心处于所述无人机组件1上。
30.作为大比例尺多旋翼无人机航磁探测装置的优选方案,所述无人机组件1还包括起落架10和旋翼机构11,所述起落架10连接在所述无人机架4的底部;
31.所述无人机架4包括呈井字型排布的机架碳管12,所述旋翼机构11分布在所述机架碳管12的外端。
32.本实施例中,所述起落架10对所述无人机组件1形成支撑,并使所述航空磁力仪设备3脱离于地面。由于起落架10的支撑,同时无人机架4上的支撑机构5使长杆组件2支撑一定高度,从而当整个装置平放或降落在地面上后,航空磁力仪设备3不会触及地面,避免在无人机起降过程中触地损坏。
33.本实施例中,所述无人机架4的中心设有底板13,所述底板13上分布有电池组14,所述电池组14与所述旋翼机构11电连接。具体的,电池组14本身属于现有技术,无人机组件1的旋翼机构11通过电池组14供电,旋翼机构11通电旋转带来起升动力。
34.本实施例中,所述支撑机构5设有两组,每组所述支撑机构5包括两幅支撑碳管15,两幅所述支撑碳管15和所述机架碳管12呈三角形排布。所述支撑碳管15的一端和所述机架碳管12连接,所述支撑碳管15的另外一端铰接有固定套16,所述碳纤维杆6穿插入所述固定套16中。
35.具体的,由于支撑机构5的支撑碳管15和机架碳管12呈三角形排布,支撑机构5的稳定性较强,且采用两组支撑机构5对长杆组件2进行支撑,保证稳定的姿态,减少航磁数据转向差的影响。同时,长杆组件2的机身固定为上架式安装,一方面极大地方便了平时安装拆卸,另一方面,避免了传统的长杆式连接方式直接安装到多旋翼无人机的机腹下方而造成远端的钾光泵探头9在无人机起降过程中触地损坏。
36.另外,由于钾光泵探头9放置在碳纤维杆6的远端,碳纤维杆6的另一头固定到无人
机架4上的支撑机构5上,以此避免无人机在飞行过程中自身姿态变化所产生的磁场对航空磁力仪测量的数据造成干扰。
37.本实施例中,所述定位设备8采用gps定位终端或北斗定位终端。具体的,gps定位终端或北斗定位终端本身属于现有技术,通过gps定位终端或北斗定位终端可以起到定位作用。
38.本实施例中,所述碳纤维杆6上还连接有3d打印仪器主机固定盒。通过3d打印仪器主机固定盒可以固定安装3d打印仪器主机,方便进行打印操作。另外,所述航空磁力仪设备3还配置有姿态传感器17和激光雷达高度计18,所述姿态传感器17用于获取所述航空磁力仪设备3的姿态数据,所述激光雷达高度计18用于获取所述航空磁力仪设备3的高度数据。
39.综上所述,本实用新型设有无人机组件1、长杆组件2和航空磁力仪设备3;无人机组件1包括无人机架4,无人机架4连接有支撑机构5;长杆组件2包括碳纤维杆6;航空磁力仪设备3包括磁力仪主机7、定位设备8和钾光泵探头9;碳纤维杆6的一端和支撑机构5连接,磁力仪主机7和定位设备8均固定于碳纤维杆6上,钾光泵探头9固定在碳纤维杆6远离无人机组件1的一端;无人机组件1、长杆组件2和航空磁力仪设备3的整体重心处于无人机组件1上。由于起落架10的支撑,同时无人机架4上的支撑机构5使长杆组件2支撑一定高度,从而当整个装置平放或降落在地面上后,航空磁力仪设备3不会触及地面,避免在无人机起降过程中触地损坏。由于支撑机构5的支撑碳管15和机架碳管12呈三角形排布,支撑机构5的稳定性较强,且采用两组支撑机构5对长杆组件2进行支撑,保证稳定的姿态,减少航磁数据转向差的影响。同时,长杆组件2的机身固定为上架式安装,一方面极大地方便了平时安装拆卸,另一方面,避免了传统的长杆式连接方式直接安装到多旋翼无人机的机腹下方而造成远端的钾光泵探头9在无人机起降过程中触地损坏。另外,由于钾光泵探头9放置在碳纤维杆6的远端,碳纤维杆6的另一头固定到无人机架4上的支撑机构5上,以此避免无人机在飞行过程中自身姿态变化所产生的磁场对航空磁力仪测量的数据造成干扰。本实用新型利用长杆组件2将航空磁力仪设备3中的钾光泵探头9放置在碳纤维杆6的远端,碳纤维杆6的另一头固定到无人机架4,可以此避免无人机在飞行过程中自身姿态变化所产生的磁场对航空磁力仪测量的数据造成干扰,特别是在空中大风等不利条件作业时,可保证钾光泵探头9始终和无人机保持一致,避免了钾光泵探头9来回摆动所造成的转向误差,保证了高精度航磁数据的获取。
40.虽然,上文中已经用一般性说明及具体实施例对本实用新型作了详尽的描述,但在本实用新型基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本实用新型精神的基础上所做的这些修改或改进,均属于本实用新型要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1