一种变构空中作业机器人的制作方法
【】本技术涉及机器人,特别涉及一种变构空中作业机器人。
背景技术
0、
背景技术:
1、小型无人机具有体积小、重量轻,航时长,便于携带的特点;结构采用模块化设计,可快速组装拆卸,便于运输;动力系统采用成熟高效无刷电机及碳纤维螺旋桨,电池采用高能量密度电池,使无人机航时得到进一步提高;同时,小型无人机系统智能化程度高,具备环境感知能力与图像采集功能,可对目标进行图像识别、锁定与跟踪。因此,小型无人机将在未来的空中作业中担任更加重要的角色。
2、四旋翼无人机是最常用的一种无人机,目前被广泛应用在航拍、快递运送、巡检等领域;例如,申请日为2022.06.01,申请号为cn202210619623.1的中国发明专利公开了一种变结构四旋翼无人机,变结构四旋翼无人机的机臂由内段机臂和外段机臂组成,且各段机臂上均安装有可变形机构;所述内段机臂上设计的限位齿轮结构与所述机臂驱动齿轮相啮合,机臂驱动齿轮通过伺服电机的驱动可绕固定在底板上的固定轴转动,从而构成内段机臂变形机构,使内段机臂可绕机臂驱动齿轮的转轴横向转动;所述外段机臂驱动伺服电机可带动外段机臂的纵向转动,且在内段机臂上设计有对外段机臂的转动起限位作用的结构;所述电机座与电机倾转机构从动齿轮固连,通过电机倾转机构驱动齿轮的带动,可带动无刷电机前后倾转;通过上述机臂的变形原理,可以使四旋翼无人机更灵活地在狭窄的空间中飞行。然而,现有四旋翼无人机在使用的过程中,不方便搬运物体飞行,这给实际的使用带来了限制。鉴于上述存在的问题,本案发明人对该问题进行深入研究,遂有本案产生。
技术实现思路
0、
技术实现要素:
1、本实用新型要解决的技术问题,在于提供一种变构空中作业机器人,解决现有四旋翼无人机在使用的过程中,不方便搬运物体飞行,给实际的使用带来了限制的问题。
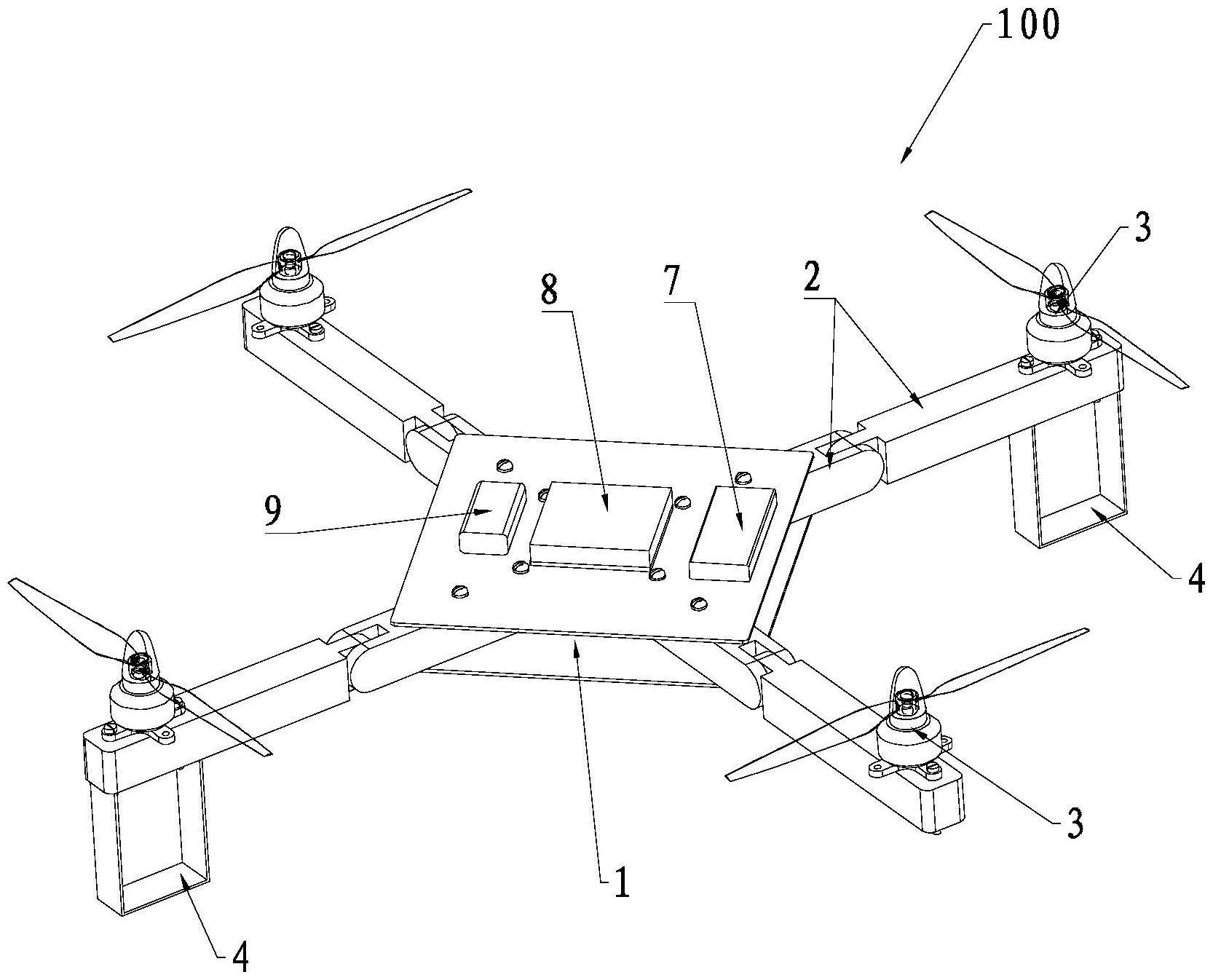
2、本实用新型是这样实现的:一种变构空中作业机器人,包括机身本体以及与所述机身本体相连接的四个支撑臂,每个所述支撑臂上均设置有旋翼组件;四个所述支撑臂以两两为一组对称设置在所述机身本体上,任意一组所述支撑臂为可折叠支撑臂,且可折叠支撑臂的自由端底部固设有夹持件。
3、进一步的,所述机身本体的底部设置有栖停夹持槽。
4、进一步的,四个所述支撑臂均为可折叠支撑臂。
5、进一步的,每个所述支撑臂均包括与所述机身本体固定连接的支撑架、与所述支撑架相铰接的折叠支臂以及驱使所述折叠支臂向下旋转实现折叠的驱动部件。
6、进一步的,所述机身本体为方形结构,且四个所述支撑臂分别设置在所述机身本体的四个边角位置。
7、进一步的,所述机身本体为正方形结构。
8、进一步的,所述夹持件呈方框结构。
9、进一步的,所述机身本体的底部沿着中线的两侧各固设有一块固定板,且两块所述固定板之间形成所述栖停夹持槽。
10、进一步的,还包括电池、控制装置以及视觉装置;所述控制装置和视觉装置均与所述电池电线连接。
11、进一步的,所述控制装置固定在所述机身本体顶部的中间位置,所述电池固定在所述控制装置的一侧,所述视觉装置固定在所述控制装置的另一侧。
12、通过采用本实用新型的技术方案,至少具有如下有益效果:
13、1、通过设计机器人的任意一组支撑臂为可折叠支撑臂,且在两个可折叠支撑臂的自由端底部均固设有夹持件,使得在具体使用时,该组可折叠支撑臂能够向下旋转实现折叠,且在可折叠支撑臂向下折叠的过程中,该组可折叠支撑臂底部的两个夹持件会向中间靠拢,从而能够夹持物品实现空中搬运。
14、2、通过在机身本体的底部设置栖停夹持槽,使得在具体使用的过程中,可利用该栖停夹持槽实现机器人在空中进行栖停,这样当机器人需要在空中进行侦察时,可以通过栖停的方式使机器人保持在空中侦察状态,而无需利用旋翼组件提供升力,因此能够有效提升机器人在空中的滞留时间,从而更好地满足特定的侦察任务需求。
15、3、整个机器人体型小,成本低,携带方便,既能够实现空中搬运功能,又能够实现空中栖停功能,能够很好地满足多场景使用需求。
技术特征:
1.一种变构空中作业机器人,包括机身本体以及与所述机身本体相连接的四个支撑臂,每个所述支撑臂上均设置有旋翼组件;其特征在于:四个所述支撑臂以两两为一组对称设置在所述机身本体上,任意一组所述支撑臂为可折叠支撑臂,且可折叠支撑臂的自由端底部固设有夹持件。
2.如权利要求1所述的一种变构空中作业机器人,其特征在于:所述机身本体的底部设置有栖停夹持槽。
3.如权利要求2所述的一种变构空中作业机器人,其特征在于:四个所述支撑臂均为可折叠支撑臂。
4.如权利要求3所述的一种变构空中作业机器人,其特征在于:每个所述支撑臂均包括与所述机身本体固定连接的支撑架、与所述支撑架相铰接的折叠支臂以及驱使所述折叠支臂向下旋转实现折叠的驱动部件。
5.如权利要求1所述的一种变构空中作业机器人,其特征在于:所述机身本体为方形结构,且四个所述支撑臂分别设置在所述机身本体的四个边角位置。
6.如权利要求5所述的一种变构空中作业机器人,其特征在于:所述机身本体为正方形结构。
7.如权利要求1所述的一种变构空中作业机器人,其特征在于:所述夹持件呈方框结构。
8.如权利要求2所述的一种变构空中作业机器人,其特征在于:所述机身本体的底部沿着中线的两侧各固设有一块固定板,且两块所述固定板之间形成所述栖停夹持槽。
9.如权利要求1-8任意一项所述的一种变构空中作业机器人,其特征在于:还包括电池、控制装置以及视觉装置;所述控制装置和视觉装置均与所述电池电线连接。
10.如权利要求9所述的一种变构空中作业机器人,其特征在于:所述控制装置固定在所述机身本体顶部的中间位置,所述电池固定在所述控制装置的一侧,所述视觉装置固定在所述控制装置的另一侧。
技术总结
本技术提供了一种变构空中作业机器人,包括机身本体以及与所述机身本体相连接的四个支撑臂,每个所述支撑臂上均设置有旋翼组件;四个所述支撑臂以两两为一组对称设置在所述机身本体上,任意一组所述支撑臂为可折叠支撑臂,且可折叠支撑臂的自由端底部固设有夹持件。本技术的优点在于:通过可折叠支撑臂和夹持件配合,能够夹持物品实现空中搬运;在机身本体的底部设置栖停夹持槽,可以通过栖停的方式使机器人保持在空中侦察状态,而无需利用旋翼组件提供升力,因此能够有效提升机器人在空中的滞留时间,从而更好地满足特定的侦察任务需求。
技术研发人员:何小林,王志宏
受保护的技术使用者:泉州中国兵器装备集团特种机器人研发中心
技术研发日:20221227
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!