一种自稳飞行装置的制作方法
本发明涉及飞行器及航空,尤其是一种自稳飞行装置。
背景技术:
1、直升机作为20世纪航空技术极具特色的创造之一,极大地拓展了飞行器的应用范围。直升机是典型的军民两用产品,可以广泛的应用在运输、巡逻、旅游、救护等多个领域。
2、直升机发动机驱动旋翼提供升力,把直升机举托在空中。具体地,直升机分有单旋翼直升机以及双旋翼直升机;单旋翼直升机的主发动机同时也输出动力至尾部的小桨,机载陀螺仪能侦测直升机回转角度并反馈至尾桨,通过调整小桨的螺距可以抵消大螺旋桨产生的不同转速下的反作用力。双旋翼直升机通常采用旋翼相对反转的方式来抵消旋翼产生的不平衡力矩。
3、当前调节直升飞机的飞行方向,是通过称为“倾斜盘”的机构可以改变直升机的旋翼的桨叶角,从而实现旋翼周期变距,并改变旋翼旋转平面不同方位的升力来实现改变直升机的飞行姿态。
4、中国专利文献(专利名称:一种双旋翼模型直升飞机控制系统、专利号:200910215989.7)公的技术方案是:包括控制动力机构、传动机构、控制机构和旋翼机构四部分,所述旋翼机构为沿主轴上下分布、同轴安装且分别由内外轴控制旋转的上旋翼和下旋翼,其改良的结构是所述控制机构包括控制上旋翼的贝尔自平衡机构和控制下旋翼的贝尔-希拉控制结构两部分,控制动力机构依次通过传动机构和控制机构控制贝尔-希拉控制结构。
5、该专利文献公开的技术方案存在以下缺陷:1、在该技术方案中,下旋翼起到控制方向的作用,采用灵敏度很高的贝尔-希拉控制结构进行主动控制;但结合该专利文献的附图8至附图10以及说明书相关的阐述可知,贝尔-希拉控制结构与下旋翼的连接结构是相当复杂的,组成构件多,会存在故障率高、装配费时繁琐、成本高昂的缺陷;2、当贝尔-希拉控制结构发生故障时,则无法通过控制下旋翼达到控制方向的目的,会令飞机处于失控状态,存在极大安全隐患,对生命安全造成威胁。
6、基于此,有必要公开一种安全性高的自稳飞行装置。
技术实现思路
1、本发明克服了现有技术中的缺点,提供一种自稳飞行装置,操控简单,方便实现自动和手动驾驶,能克服现有技术的缺陷。
2、为了解决上述技术问题,本发明是通过以下技术方案实现的:
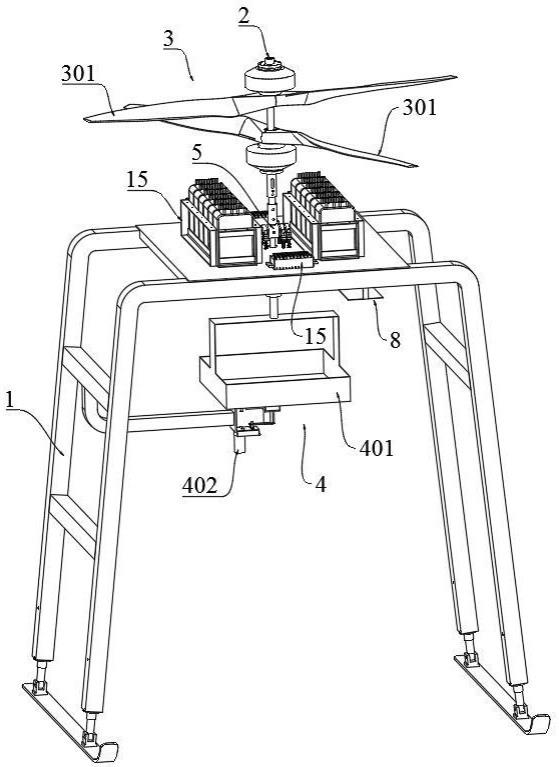
3、一种自稳飞行装置,包括架体以及支柱,所述支柱上设置有旋翼组件以及配重组件;所述旋翼组件连接在所述支柱的上方,所述配重组件连接在所述支柱的下方,所述架体通过活动组件活动连接于旋翼组件和配重组件之间;所述活动组件能使旋翼组件相对架体作前后倾转和左右偏转,以控制所述自稳飞行装置的飞行姿态。
4、更进一步地,架体包括多轴飞行模块。
5、更进一步地,所述活动组件采用以下结构的一种:
6、a、包括基座,所述基座连接在所述架体上,所述基座上转动设置有轴体,所述轴体能相对所述基座前后倾转;所述轴体的中部设置有安装孔,所述支柱左右转动连接在所述安装孔中,所述支柱能相对所述安装孔左右偏转;
7、b、包括第一装配框以及第二装配框,所述第一装配框位于所述第二装配框内、并且两者中心重合;所述支柱横向贯穿设置有第一圆杆,所述第一圆杆的两端转动连接在所述第一装配框内:所述第一装配框的两侧设置有第二圆杆,所述第二圆杆转动连接在所述第二装配框内,所述第一圆杆的转动方向所在平面与所述第二圆杆的转动方向所在平面相互垂直,所述第二装配框固接在所述架体的中心;
8、c、包括第一连接件、第二连接件以及第三连接件;所述第一连接件的下端与配重组件连接,所述第一连接件的上端与所述第二连接件铰接,所述第二连接件与所述第三连接件的下端铰接,所述第三连接件的上端与所述架体铰接。
9、更进一步地,所述旋翼组件至少包含以下结构的一种:
10、a、多个动力旋翼器共轴地连接在所述支柱上;
11、b、多个动力旋翼器规律地分布在所述支柱的周围;
12、c、单个动力旋翼器安装在所述支柱上;
13、d、单个或两个自转旋翼器安装在所述支柱上,采用两个自转旋翼器时共轴布置。
14、更进一步地,所述配重组件至少包含以下结构之一:
15、a、置物箱以及舵机控制机构;
16、b、第一框架以及第一操纵杆;
17、c、第一连杆以及坐垫;
18、d、第二框架,所述支柱的下端与所述第二框架的上端连接,所述第二框架的下端设置躺板;
19、e、第二连杆以及操纵盘。
20、更进一步地,所述支柱的下端与所述置物箱连接,所述舵机控制机构包括第一舵机、第二舵机以及舵机固定杆,所述第一舵机固定在所述架体上,所述第一舵机的转轴与第一连接杆的一端连接,所述第一连接杆的另一端与第二连接杆的下端连接,所述第二连接杆的上端与第二舵机连接;所述第二舵机的转轴与第三连接杆的一端连接,所述第三连接杆的另一端与第四连接杆的下端连接,所述第四连接杆的上端与所述置物箱连接;所述舵机固定杆的一端与所述架体铰接,另一端与所述第二舵机连接。
21、更进一步地,所述支柱的下端与所述第一框架的上端连接,所述第一框架的下端设置有第一配重块;所述第一框架设置有第一关节轴承,所述架体设置有第二关节轴承,所述第一操纵杆的下端与所述第一关节轴承连接,所述第一操纵杆的中部与所述第二关节轴承连接。
22、更进一步地,所述支柱的下端与所述第一连杆的上端连接,所述第一连杆的下端与所述坐垫连接;所述坐垫的下方连接有复位弹簧。
23、更进一步地,所述支柱的下端与所述第二连杆的上端连接,所述第二连杆的下端与第二配重块连接,所述第二配重块与第三连杆连接,所述第三连杆的上方设置有座位;还包括安装杆以及第四连杆,所述操纵盘连接在所述安装杆上;所述第三连杆设置有第三关节轴承,所述座位设置有第四关节轴承,所述第四连杆的下端与所述第三关节轴承连接,所述第四连杆的中部与所述第四关节轴承连接,所述第四连杆的上端与所述安装杆连接。
24、更进一步地,包括推进器,推进器是为所述自稳飞行装置提供向前的动力的。
25、更进一步地,所述架体上设置有安装柱,所述基座是固定在所述安装柱上;所述安装柱上配有缓冲弹簧。
26、更进一步地,所述架体设置有尾翼。
27、更进一步地,还包括有置物台,所述置物台与第四连接件铰接,所述第四连接件与连接柱铰接,所述连接柱连接在所述架体上。
28、更进一步地,所述架体的左右两侧设置了机翼,前行时用来产生升力。
29、更进一步地,所述配重组件包括机舱以及起落架,所述起落架连接在所述机舱的下方;所述架体连接有第二操纵杆,所述第二操纵杆延伸至所述机舱;多轴飞行模块的控制方式为:采用传统的“x”型八轴无人机的飞行控制器控制。
30、更进一步地,多轴飞行模块采用四轴飞行模块或六轴飞行模块或八轴飞行模块;采用四轴飞行模块时,四个动力电机采用传统的“x”型八轴无人机的飞行控制器中的“井”形布置的四个控制回路控制,另外的四个控制回路控制支柱上方的旋翼组件。
31、更进一步地,所述架体连接有第二操纵杆,所述第二操纵杆延伸至所述机舱。
32、更进一步地,还包括故障自动断电装置,故障自动断电装置安装在所述架体上或/和旋翼组件上或/和配重组件上;所述故障自动断电装置至少包含行程开关、水平度传感器、转速传感器三者中的一种;所述故障自动断电装置与航电系统信号连接,所述航电系统与旋翼组件信号连接。
33、更进一步地,多个动力旋翼器共轴布置时,动力旋翼器的轴是空心的,方便布置动力旋翼器的供电线路。
34、更进一步地,还包括蛋形舱以及智能车,所述蛋形舱能拆卸连接在所述架体上;所述智能车包括托盘、升降组件以及移动架,所述移动架设置有万向轮;所述移动架与所述升降组件连接,所述升降组件与所述托盘连接;所述蛋形舱匹配装配在所述托盘上。
35、一种自稳飞行装置,其应用包括以下步骤:
36、a、当人需要出行时,传呼出发地的智能车来到出行人的出发地,智能车上本身带有蛋形舱;
37、或,出行人自己带有蛋形舱;
38、将蛋形舱放置在智能车的托盘上,人进入蛋形舱中乘坐;
39、b、智能车运载蛋形舱至起飞地点,通过升降组件控制蛋形舱的高度,以便于蛋形舱能连接固定在所述架体上;
40、c、自稳飞行装置会起飞携带蛋形舱去到目的地;
41、d、飞行至降落点后,降落点的智能车移动至蛋形舱的下方,通过升降组件控制托盘的高度将蛋形舱接取,然后将蛋形舱运载至出行人的指定位置;
42、e、人从蛋形舱中走出,到达目的地。
43、与现有技术相比,本发明的有益效果至少包括:
44、(1)本技术技术方案是通过配重组件对旋翼组件工作时所形成的升力面的倾斜度进行控制,从而达到控制该飞行装置实现垂直升降以及往不同的方向飞行,该配重组件与传统控制结构相比具有结构简单、构件少的优点,能降低故障率,装配便利,操控简单,方便实现自动和手动驾驶;
45、(2)传统飞行器中,当控制旋翼的控制结构发生故障时,很难稳住飞行器,会令飞行器处于失控乱飞状态,存在极大安全隐患,而在本技术技术方案中,配重组件达到将旋翼组件摆正的作用,令旋翼组件的转动平面恢复至与地面基本平行的状态,不易发生侧翻或乱飞现象,安全性高,安全性高。
- 还没有人留言评论。精彩留言会获得点赞!