一种星表缓冲行走与采样探测系统的制作方法
本发明属于深空探测,涉及一种星表缓冲行走与采样探测系统。
背景技术:
1、目前,地外天体原位探测必要步骤包括:缓冲着陆、星表移动、样品采集、样品分析等。其中缓冲着陆一般采用独立的着陆缓冲机构实现,星表移动通过轮式移动方式实现,样品采集通过采样机械臂+末端采样工具的方式实现,样品分析则根据拟分析的科学目标特性配置专用的科学分析设备实现。
2、上述基本配置方式虽然可以实现地外天体原位探测的科学目标,但探测器设计研制过程中面临设备配置多、资源消耗大、研制周期长、过程管控难,基于缓冲、移动、采样、探测功能设备独立配置的探测器设计模式已难以满足深空探测任务对探测器轻量化、智能化、集成化的新要求。
技术实现思路
1、本发明解决的技术问题是:克服现有技术的不足,提出一种星表缓冲行走与采样探测系统,可实现着陆缓冲、行走移动、星壤采样、星壤原位探测等功能,解决了探测器系统着陆、移动、采样、探测的一体化设计与轻量化设计技术问题。
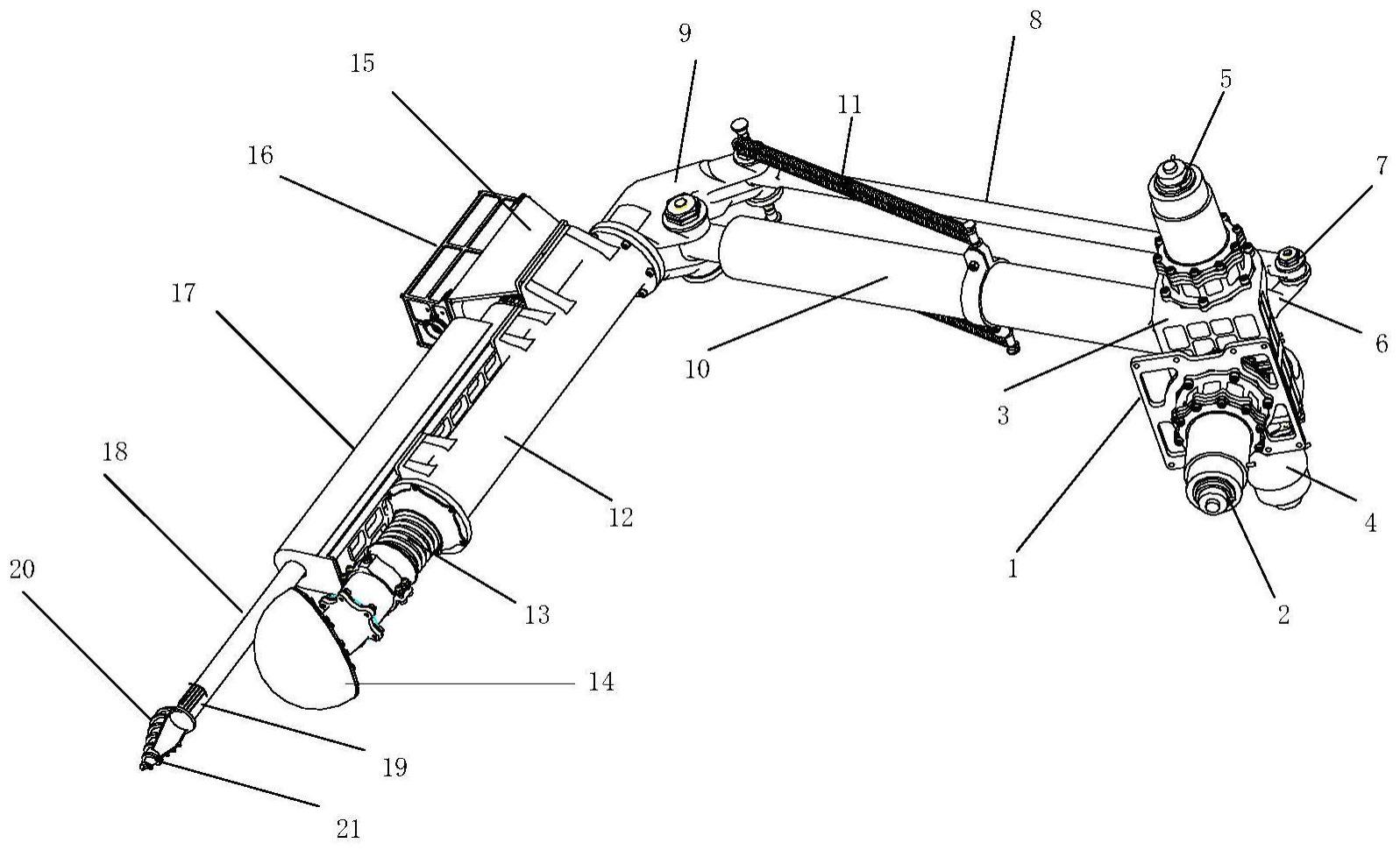
2、本发明解决技术的方案是:一种星表缓冲行走与采样探测系统,包括探测器和法兰连接的多条复合腿臂;所述复合腿臂包括髋部滚转驱动组件、关节安装支架、髋部俯仰驱动组件、膝关节驱动组件、摆杆组件、摆杆铰链、连杆组件、膝关节铰链组件、大腿组件、小腿组件、缓冲足垫组件、采样单元驱动组件、采样传动组件、采样钻杆组件、复合采样头;
3、髋部滚转驱动组件的壳体与法兰固连,髋部滚转驱动组件的输出轴相对髋部滚转驱动组件的壳体做回转运动;
4、关节安装支架与髋部滚转驱动组件的输出轴固连,在髋部滚转驱动组件的驱动作用下,关节安装支架相对髋部滚转驱动组件的壳体回转运动;
5、髋部俯仰驱动组件的壳体与关节安装支架固连,髋部俯仰驱动组件的输出轴相对髋部俯仰驱动组件的壳体做回转运动;
6、膝关节驱动组件的壳体与关节安装支架固连,膝关节驱动组件的输出轴相对膝关节驱动组件的壳体做回转运动;
7、摆杆组件一端与膝关节驱动组件的输出轴固连,另一端与摆杆铰链铰接;摆杆铰链一端与摆杆组件铰接,另一端与连杆组件铰接;连杆组件一端与摆杆铰链铰接,另一端与膝关节铰链组件铰接;大腿组件一端与髋部俯仰驱动组件的输出轴固连,另一端与膝关节铰链组件铰接;髋部俯仰驱动组件、膝关节驱动组件、摆杆组件、摆杆铰链、连杆组件、膝关节铰链组件、大腿组件共同构成了平行四边形机构;
8、小腿组件一端与膝关节铰链组件固连,另一端与缓冲足垫组件滑动连接;
9、采样传动组件平行安装在小腿组件轴线方向上;
10、采样单元驱动组件在采样传动组件导向作用下沿小腿组件的轴线方向做往返直线运动;
11、采样钻杆组件在采样单元驱动组件的驱动作用下为复合采样头提供钻进过程所需的进给运动与回转运动;
12、复合采样头用于实现复合腿臂可达空间内的铲、刨、挖、钻、冲击形式的样品采集及样品转移。
13、进一步的,在髋部俯仰驱动组件工作而膝关节驱动组件不工作时,所述平行四边形机构构型保持不变,整体随髋部俯仰驱动组件的输出轴做旋转运动;在膝关节驱动组件工作而髋部俯仰驱动组件不工作时,膝关节铰链组件绕“膝关节铰链组件与大腿组件的铰接轴”做回转运动。
14、进一步的,所述系统还包括缓冲弹簧阻尼组件,缓冲弹簧阻尼组件一端连接在“连杆组件和膝关节铰链组件的铰接轴”上,另一端连接在大腿组件上。
15、进一步的,所述系统还包括触地开关组件,触地开关组件包括开关正极、开关负极、隔离弹簧;
16、开关正极与膝关节铰链组件固连,开关负极与缓冲足垫组件固连,隔离弹簧套在缓冲足垫组件上;当缓冲足垫组件未触地时,在隔离弹簧作用下开关正负极断开;当缓冲足垫组件触地时,隔离弹簧被压缩,开关正负极连通并发出触地信号。
17、进一步的,所述采样单元驱动组件由直线驱动组件与回转驱动组件组成;
18、直线驱动组件的壳体与小腿组件固连,直线驱动组件的运动滑块用于沿小腿组件的轴线方向做直线运动;
19、回转驱动组件的壳体与直线驱动组件的运动滑块固连,在直线驱动组件工作时,随直线驱动组件的运动滑块沿小腿组件的轴线方向做往返直线运动;
20、采样钻杆组件与所述回转驱动组件的输出轴连接,在所述直线驱动组件、回转驱动组件的作用下,实现沿小腿组件轴线方向的往返直线运动、以及绕回转驱动组件输出轴轴线的回转运动。
21、进一步的,所述系统还包括物性传感器a,物性传感器a与采样单元驱动组件的直线驱动组件壳体固连;
22、物性传感器a用于对探测目标的可见光成像,主动发射特定谱段的红外激光,实现对探测目标的原位光谱分析探测。
23、进一步的,所述系统还包括物性传感器c,物性传感器c采用溅射工艺固定在采样钻杆组件上,物性传感器c与采样钻杆组件之间设有绝缘涂层;物性传感器c用于测量采样过程中星壤的力信息。
24、进一步的,所述复合采样头采用半椎体形状设计,半椎体外协设计有切削刃与排屑螺旋槽,排屑螺旋槽上设有凹槽;
25、半椎体内侧为容屑腔,复合采样头在髋部滚转驱动组件、髋部俯仰驱动组件、膝关节驱动组件及采样单元驱动组件的直线驱动组件与回转驱动组件的联合作用下,实现复合腿臂可达空间内的铲、刨、挖、钻、冲击形式的样品采集及样品转移。
26、进一步的,所述系统还包括物性传感器b,物性传感器b固定在复合采样头排屑螺旋槽的凹槽内;
27、物性传感器b与复合采样头之间设有隔热层与绝缘层,物性传感器b用于原位测量星壤的热电信息,包括导热率与介电系数。
28、进一步的,探测器缓冲着陆时,复合腿臂处于力控制模式:当触地开关组件有开关信号时,表明该复合腿臂的缓冲足垫组件已经触及星体表面,复合腿臂在接触力的作用下开始驱动髋部滚转驱动组件、髋部俯仰驱动组件、膝关节驱动组件进行反驱运动、驱动缓冲弹簧阻尼组件进行有阻尼拉伸运动,实现探测器的缓冲着陆;通过多个复合腿臂的运动协同控制实现探测器着陆过程中的姿态稳定。
29、本发明与现有技术相比的有益效果是:
30、(1)本发明根据探测器重量及星体重力环境的因素,通过为探测器配置合适数量的复合腿臂即可实现探测器的可重复、主动缓冲着陆,解决了传统被动缓冲着陆机构着陆次数受限的技术问题;
31、(2)本发明中的多个复合腿臂组合可实现探测器在星表的腿式行走移动,解决了传统轮式移动系统越障及地形适应性差等技术问题;
32、(3)本发明中的复合腿臂可实现对星表样品的铲挖、钻进、冲击破碎等多形式采集与样品转移,并可在采样过程中同步实现对星壤力学、热学、电学、光学特性的探测反演,解决了星壤物性真正原位探测技术问题;
33、(4)本发明中的复合腿臂实现了着陆缓冲、行走移动、采样探测的功能复合应用,解决了探测器系统着陆、移动、采样、探测的一体化设计与轻量化设计技术问题,对深空探测器系统设计有益效果明显。
- 还没有人留言评论。精彩留言会获得点赞!