飞行控制表面的制作方法
本发明涉及如下内容:具有可移动飞行控制表面的阵列的飞行器机翼,可移动飞行控制表面具有附接至飞行控制表面后缘的可移动补翼;对具有附接至飞行控制表面后缘的可移动补翼的可移动飞行控制表面的阵列进行操作的方法;以及对飞行器进行飞行测试活动的方法。
背景技术:
1、如果飞行器在其通常的飞行包络之外飞行,则它可能进入失速。失速的初发受到许多不同因素的影响,并且因此会难以预测失速的确切初发和失速的蔓延速度。
2、由于失速与机翼表面上方的气流分离有关,因此在较高的机翼迎角处更可能出现失速。迎角可能受到多种因素例如高度、襟翼(flap)位置、飞行器速度、重量、展弦比和机翼扫掠的影响。
3、期望缓解飞行器机翼上的失速的初发。
技术实现思路
1、本发明的第一方面提供了一种飞行器,该飞行器包括:机翼,机翼具有机翼前缘和机翼后缘、以及沿着机翼后缘附接的可移动飞行控制表面的阵列,每个飞行控制表面具有后缘,在飞行控制表面后缘处附接有可移动补翼;一个或更多个飞行控制表面驱动系统,该一个或更多个飞行控制表面驱动系统用于使飞行控制表面相对于机翼后缘移动;补翼驱动系统,补翼驱动系统用于使补翼相对于飞行控制表面后缘移动;一个或更多个飞行器迎角传感器;以及飞行控制系统,飞行控制系统耦接至一个或更多个飞行器迎角传感器、一个或更多个飞行控制表面驱动系统以及补翼驱动系统,并且其中,飞行控制系统存储补翼的角偏转集,用于当飞行器迎角达到阈值时使补翼中的至少一些相对于它们各自的飞行控制表面向上偏转。
2、这种布置有助于缓解飞行器中的失速的初发。这是由使在失速开始出现的地方(即失速位置)附近的机翼上的负荷减少的可移动补翼的向上偏转提供的。
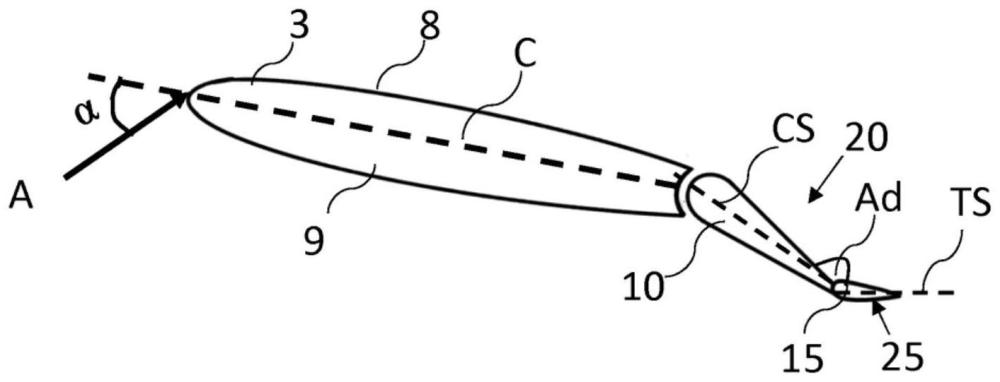
3、迎角传感器输出飞行器相对于迎面而来的自由流气流所指向的角度。自由流气流(也称为相对气流)是迎面而来的空气移动经过翼型的速度和方向。
4、补翼的角偏转集针对特定的迎角阈值而设置。这意味着当达到迎角阈值时,补翼移动至它们的预定位置。因此,补翼偏转扩展了飞行器的操作包络,而不发生机翼失速的风险。
5、飞行器的操作包络(或飞行包络)描述了飞行器1的飞行限制。这可以取决于飞行器的最大速度、高度、负荷因子和其他设计参数。因此,操作包络对于不同的飞行器设计而不同。
6、可移动补翼的角偏转是指补翼移动以相对于飞行控制表面向上偏移的角度/旋转角度。
7、阈值是指示飞行器在不失速的情况下能够达到的迎角的数值。该阈值迎角小于飞行器的失速迎角。阈值优选是从优化试验中获得的实验数据。
8、飞行控制表面可以是后缘襟翼、襟副翼或副翼。
9、补翼驱动系统可操作用于使补翼以比一个或更多个飞行控制表面驱动系统能够使飞行控制表面移动的角速率快得多的角速率移动。
10、角速率是补翼和飞行控制表面的旋转速度。可移动补翼通常比飞行控制表面小。可移动补翼相对于飞行控制表面承受相对较小的负荷,因此它们可以快速展开以缓解失速的初发。
11、由飞行控制系统存储的补翼的角偏转集可以被配置成通过在飞行器迎角的阈值处进行以下中的任一个来改变机翼负荷以改善机翼的失速行为:i)增大飞行器的失速迎角,或者ii)增大机翼的最大升举系数,或者iii)使机翼失速移动至机翼上的更良性位置。
12、机翼处的良性位置是不太容易受失速影响的区域。
13、由飞行控制系统存储的补翼的角偏转集可以通过在失速优化活动期间对飞行器的飞行测试而获得。
14、失速优化活动是改善飞行器的飞行包络的任务,特别是在飞行包络受到失速初发限制的情况下。
15、失速的初发由飞行器的设计确定,但也可能由诸如飞行器的速度、高度和迎角的因素确定。
16、补翼的角偏转集可以产生跨机翼的补翼的不同的补翼偏转角度。
17、这使得补翼能够针对沿着机翼的不同失速位置进行优化。
18、机翼失速通常可以从跨机翼后缘的一个或更多个位置向前推进,从而在高的迎角处在机翼上方产生分离气流的一个或更多个区域。展开补翼可以在这些位置中使机翼充分地减负,以基本上抑制在阈值迎角处在那些位置处失速的初发。补翼展开可以具有使失速的初发移动至机翼上的其中失速的初发对机翼失速具有有限影响的更良性位置的效果,或者补翼展开可以具有失速的初发可以发生在相同的位置处但在更高的迎角处的效果。增大失速初发发生于的迎角可以增大飞行器的失速迎角或机翼的最大升举系数。
19、机翼可以是扫掠跨音速机翼。
20、飞行器可以是运输飞行器。
21、本发明的另一个方面提供了一种操作飞行器的方法,飞行器具有机翼,机翼具有机翼前缘和机翼后缘、以及沿着机翼后缘附接的可移动飞行控制表面的阵列,每个飞行控制表面具有后缘,在飞行控制表面后缘处附接有可移动补翼,所述方法包括:当飞行器迎角达到阈值时,根据补翼的预定角偏转集使补翼中的至少一些移动,以实现补翼相对于它们各自的飞行控制表面的差分向上角偏转。
22、补翼可以以比一个或更多个飞行控制表面能够移动的角速率快得多的角速率移动。
23、本发明的另一个方面提供了一种对飞行器进行飞行测试活动的方法,飞行器具有机翼,机翼具有机翼前缘和机翼后缘、以及沿着机翼后缘附接的可移动飞行控制表面的阵列,每个飞行控制表面具有后缘,在飞行控制表面后缘处附接有可移动补翼,所述方法包括:使补翼中的至少一些移动,以实现补翼相对于它们各自的飞行控制表面的差分向上角偏转,以改变机翼负荷,以及当机翼的失速行为在所选择的飞行器迎角处被优化时,记录补翼的角偏转集。
24、失速行为优化可以基于以下准则:i)使飞行器的失速迎角最大化,或者ii)使机翼的升举系数最大化,或者iii)使机翼失速移动至机翼上的最良性位置。
技术特征:
1.一种飞行器,包括:
2.根据权利要求1所述的飞行器,其中,所述飞行控制表面是后缘襟翼、襟副翼或副翼。
3.根据任一前述权利要求所述的飞行器,其中,所述补翼驱动系统可操作用于使所述补翼以比所述一个或更多个飞行控制表面驱动系统能够使所述飞行控制表面移动的角速率快得多的角速率移动。
4.根据任一前述权利要求所述的飞行器,其中,由所述飞行控制系统存储的所述补翼的所述角偏转集被配置成通过在飞行器迎角的阈值处进行以下中的任一个来改变机翼负荷以改善所述机翼的失速行为:i)增大所述飞行器的所述失速迎角,或者ii)增大所述机翼的最大升举系数,或者iii)使机翼失速移动至所述机翼上的更良性位置。
5.根据任一前述权利要求所述的飞行器,其中,由所述飞行控制系统存储的所述补翼的所述角偏转集通过在失速优化活动期间对所述飞行器的飞行测试而获得。
6.根据任一前述权利要求所述的飞行器,其中,所述补翼的所述角偏转集产生跨所述机翼的所述补翼的不同的补翼偏转角度。
7.根据权利要求3至6中的任一项所述的飞行器,其中,机翼失速从所述机翼的后缘向前推进。
8.根据任一前述权利要求所述的飞行器,其中,所述机翼是扫掠跨音速机翼。
9.根据任一前述权利要求所述的飞行器,其中,所述飞行器是运输飞行器。
10.一种操作飞行器的方法,所述飞行器具有机翼,所述机翼具有机翼前缘和机翼后缘、以及沿着所述机翼后缘附接的可移动飞行控制表面的阵列,每个飞行控制表面具有后缘,在飞行控制表面后缘处附接有可移动补翼,所述方法包括:
11.根据权利要求10所述的方法,其中,所述补翼以比所述一个或更多个飞行控制表面能够移动的角速率快得多的角速率移动。
12.根据权利要求10或11所述的方法,其中,所述飞行器是根据权利要求1至9中的任一项所述的飞行器。
13.一种对飞行器进行飞行测试活动的方法,所述飞行器具有机翼,所述机翼具有机翼前缘和机翼后缘、以及沿着所述机翼后缘附接的可移动飞行控制表面的阵列,每个飞行控制表面具有后缘,在飞行控制表面后缘处附接有可移动补翼,所述方法包括:
14.根据权利要求13所述的方法,其中,所述失速行为优化基于以下准则中的一个:i)使所述飞行器的失速迎角最大化,或者ii)使所述机翼的升举系数最大化,或者iii)使机翼失速移动至所述机翼上的最良性位置。
15.根据权利要求13或14所述的方法,其中,所述飞行器是根据权利要求1至9中的任一项所述的飞行器。
技术总结
本发明涉及飞行控制表面。飞行器机翼具有可移动飞行控制表面的阵列,每个飞行控制表面具有后缘,飞行控制表面后缘附接有可移动补翼。飞行控制系统,其耦接至使飞行控制表面移动的飞行控制表面驱动系统;补翼驱动系统,其使可移动补翼移动;以及一个或更多个飞行器迎角传感器。飞行控制系统存储角偏转集以当迎角达到阈值时使补翼向上偏转。
技术研发人员:奥利弗·法米利
受保护的技术使用者:空中客车营运有限公司
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!