包括自平衡机构的无人机
本技术涉及无人机,尤其是涉及一种包括自平衡机构的无人机。
背景技术:
1、目前无人机搭配三维云台已经成为监测无人机的标准配置,能够完成绝大多数的监测任务。上述无人机可以应用到林地、山地、草地等野外环境,可以用于火灾监测等任务。
2、但是,上述起飞环境往往不是平坦的。而确保无人机在起飞前保持水平是非常重要的,这不仅可以确保无人机在起飞时稳定,避免意外的翻滚或偏移。此外,相关的无人机需要在平衡状态下完成起飞前的姿态解算,否则会导致起飞后的姿态异常。这对于避免无人机受损和顺利完成监测工作都是至关重要的。
3、为了解决上述问题,相关的解决方式是为无人机配置可调整的起飞支架或起飞平台来辅助无人机起飞。然而,上述起飞支架通常人工调节,存在难以携带、无法保障精度和稳定性等问题。
技术实现思路
1、本实用新型的内容部分用于以简要的形式介绍构思,这些构思将在后面的具体实施方式部分被详细描述。本公开的内容部分并不旨在标识要求保护的技术方案的关键特征或必要特征,也不旨在用于限制所要求的保护的技术方案的范围。
2、本实用新型提供一种包括自平衡机构的无人机,来解决以上背景技术部分提到的技术问题。
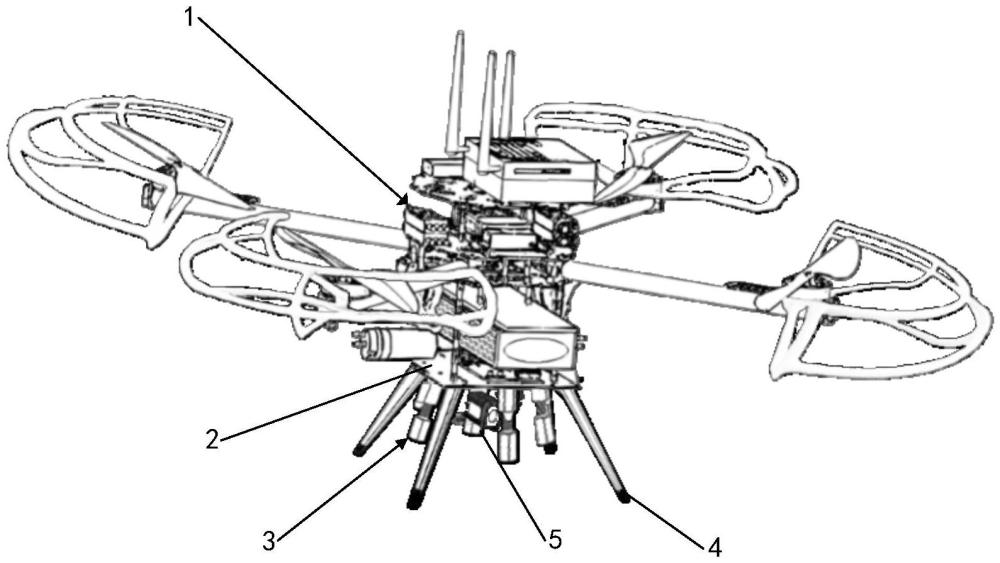
3、本实用新型的包括自平衡机构的无人机,包括无人机主体以及连接到所述无人机主体底部的自平衡机构,其中,所述自平衡机构用于使所述无人机在起落时保持平衡姿态,所述自平衡机构包括四个调节架组件,每个所述调节架组件包括折叠部和调节部;所述折叠部包括收纳筒、第一传动组件以及与所述第一传动组件连接的转动管,所述收纳筒与所述无人机主体底部连接,所述第一传动组件用于带动所述转动管折叠到所述收纳筒内或者旋转出所述收纳筒;所述调节部包括与所述转动管活动连接的调节杆以及第二传动组件,所述调节杆端部设置有传感器;所述第二传动组件用于带动所述调节杆伸出或者收缩于所述转动管。
4、可选的,所述收纳筒底部设置有开口。
5、可选的,所述第一传动组件包括关节旋转舵机、关节转动齿轮、关节轴;所述关节旋转舵机连接到所述收纳筒内壁,所述关节旋转舵机的传动轴与所述关节转动齿轮连接,所述关节转动齿轮与所述转动管啮合;所述关节轴穿过所述转动管,所述关节轴的两端与所述收纳筒的内壁接合,使得所述转动管在所述关节旋转舵机的驱动下,环绕所述关节轴转动。
6、可选的,所述第一传动组件还包括保护仓,所述保护仓套置到所述关节旋转舵机上。
7、可选的,所述折叠部还包括复位组件,所述复位组件包括弹簧,所述弹簧的两端连接所述转动管和所述收纳筒。
8、可选的,所述复位组件还包括第一固定环和第二固定环,所述第一固定环固设到所述收纳筒内壁,所述第二固定环固设到所述转动管,所述弹簧的两端分别连接所述第一固定环和所述第二固定环。
9、可选的,所述转动管设置有内螺纹,所述调节杆设置有外螺纹,所述调节杆与所述转动管螺纹连接。
10、可选的,所述第二传动组件包括调节舵机、动力齿轮以及从动齿轮,所述调节舵机的输出端与所述动力齿轮连接,所述动力齿轮与所述从动齿轮啮合,所述从动齿轮与所述调节杆啮合。
11、可选的,所述第二传动组件还包括隔离仓、调节舵机支架以及转动轴,所述隔离仓与所述转动管的外壁接合;所述调节舵机支架设置到所述调节舵机底部,用于放置所述调节舵机;所述转动轴枢转地连接到所述调节舵机支架和所述隔离仓之间,所述从动齿轮套置到所述转动轴上。
12、可选的,所述无人机还包括设置到所述无人机底部的底面板,所述底面板用于连接所述收纳筒、云台以及四个支撑架。
13、本实用新型的上述实施例具有如下有益效果:通过本实用新型的一些实施例的包括自平衡机构的无人机,能够在不同地形的起飞环境中,保持无人机的姿态平衡。避免意外的翻滚或偏移,提高了该无人机的安全性和适用性。此外,自平衡机构通过第一传动组件和第二传动组件调节,避免人工调节所造成的无法保障精度的问题,提高了该自平衡机构的可靠性。
14、具体地,上述第一传动组件带动转动管旋转,使得该转动管带动调节部旋转出收纳筒。进而能够调整调节杆的朝向角度。第二传动组件能够带动调节杆伸出该转动管到地面。进而能够调整调节杆的伸出长度。如此一来,通过对四个调节杆的调整能够使无人机处于平衡状态。使得该无人机能够适用于多种地形。
15、此外,上述调整过程无需人工参与,提高了该无人机的精度以及自动化程度。
技术特征:
1.一种包括自平衡机构的无人机,其特征在于,包括无人机主体以及连接到所述无人机主体底部的自平衡机构,其中,
2.根据权利要求1所述的包括自平衡机构的无人机,其特征在于,所述收纳筒底部设置有开口。
3.根据权利要求2所述的包括自平衡机构的无人机,其特征在于,所述第一传动组件包括关节旋转舵机、关节转动齿轮、关节轴;所述关节旋转舵机连接到所述收纳筒内壁,所述关节旋转舵机的传动轴与所述关节转动齿轮连接,所述关节转动齿轮与所述转动管啮合;所述关节轴穿过所述转动管,所述关节轴的两端与所述收纳筒的内壁接合,使得所述转动管在所述关节旋转舵机的驱动下,环绕所述关节轴转动。
4.根据权利要求3所述的包括自平衡机构的无人机,其特征在于,所述第一传动组件还包括保护仓,所述保护仓套置到所述关节旋转舵机上。
5.根据权利要求1所述的包括自平衡机构的无人机,其特征在于,所述折叠部还包括复位组件,所述复位组件包括弹簧,所述弹簧的两端连接所述转动管和所述收纳筒。
6.根据权利要求5所述的包括自平衡机构的无人机,其特征在于,所述复位组件还包括第一固定环和第二固定环,所述第一固定环固设到所述收纳筒内壁,所述第二固定环固设到所述转动管,所述弹簧的两端分别连接所述第一固定环和所述第二固定环。
7.根据权利要求1所述的包括自平衡机构的无人机,其特征在于,所述转动管设置有内螺纹,所述调节杆设置有外螺纹,所述调节杆与所述转动管螺纹连接。
8.根据权利要求7所述的包括自平衡机构的无人机,其特征在于,所述第二传动组件包括调节舵机、动力齿轮以及从动齿轮,所述调节舵机的输出端与所述动力齿轮连接,所述动力齿轮与所述从动齿轮啮合,所述从动齿轮与所述调节杆啮合。
9.根据权利要求8所述的包括自平衡机构的无人机,其特征在于,所述第二传动组件还包括隔离仓、调节舵机支架以及转动轴,所述隔离仓与所述转动管的外壁接合;所述调节舵机支架设置到所述调节舵机底部,用于放置所述调节舵机;所述转动轴枢转地连接到所述调节舵机支架和所述隔离仓之间,所述从动齿轮套置到所述转动轴上。
10.根据权利要求1-9中任一所述的包括自平衡机构的无人机,其特征在于,所述无人机还包括设置到所述无人机底部的底面板,所述底面板用于连接所述收纳筒、云台以及四个支撑架。
技术总结
本技术提供了一种包括自平衡机构的无人机,包括无人机主体以及连接到无人机主体底部的自平衡机构,自平衡机构包括四个调节架组件,每个调节架组件包括折叠部和调节部;折叠部包括收纳筒、第一传动组件以及与第一传动组件连接的转动管,收纳筒与无人机主体底部连接,第一传动组件用于带动转动管折叠到收纳筒内或者旋转出收纳筒;调节部包括与转动管活动连接的调节杆以及第二传动组件,调节杆端部设置有传感器;第二传动组件用于带动调节杆伸出或者收缩于转动管。该实施方式通过第一传动组件和第二传动组件调整调节杆的朝向以及伸出长度,能够使无人机处于平衡状态,提高了该无人机的适用性。
技术研发人员:吴博淳,黄海锋,陈鑫浩,温嘉文,黄锦山,唐睿智
受保护的技术使用者:广州大学
技术研发日:20231124
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!