带同步谐调功能的合吊联动起重机的制作方法
1.本发明涉及通过利用多个吊钩进行合吊联动而搬运长条物、重物的合吊联动起重机,特别是涉及具备为此目的的同步谐调功能的合吊联动起重机。
背景技术:
2.在搬运长条物、重物的情况下,有时利用两台起重机进行合吊。例如,如铁道车辆那样长条且载荷点位于两端部附近的物体能够利用两台合吊联动起重机进行合理的搬运。
3.另外,在输送巨大的重物的情况下,与利用一台巨大的起重机进行吊挂相比,在利用两台起重机进行吊挂的情况下,通过经由各起重机将施加于建筑物、地基的载荷分散到更为宽广的范围,从而能够使建筑物、地基为低成本。
4.另外,在桥式起重机的情况下,能够降低建筑物顶棚或者使起重机良好地向建筑物端部靠近。
5.并且,在不进行重物的输送的情况下,由于能够按各个起重机进行分割而进行作业,因此,具有作业效率高等各种优点。
6.并且,为了应对利用这样的两台起重机进行合吊的需求,以往提出了各种技术(例如参照专利文献1~3)。
7.在先技术文献
8.专利文献
9.专利文献1:日本特开平7-237885号公报
10.专利文献2:日本特开平8-217378号公报
11.专利文献3:日本特开2016-147726号公报
技术实现要素:
12.发明要解决的课题
13.另外,若吊起的搬运物进一步长条且巨大化,则有时并非是利用两台起重机(两个吊钩)进行吊起,而是在使用三台以上的起重机(三个以上的吊钩)的情况下成为起重机的成本上廉价的系统,出现了这样的需求。
14.然而,在上述专利文献1~3公开的技术中,若利用三台以上的起重机(三个以上的吊钩)进行合吊联动下的吊起,则会产生某一个吊钩成为过载荷或者某一个吊钩浮起等现象,利用三个以上的吊钩的合吊联动在以往技术中难以实现,需要用于使三个以上的吊钩进行合吊联动的新的技术。
15.在此,在使三个以上的吊钩进行合吊联动的情况下,为了对多台起重机同时赋予卷绕提升/卷绕下落指令,通过使用将无线、光等作为介质的串行通信装置,从而能够合理地向各起重机发送信号,但在使用串行通信的情况下,各个起重机接收信号的时机会稍微偏离,因此,起动的时机会产生微小的偏离,会产生三台以上的吊钩的负荷分担的不均衡。
16.另外,在卷绕提升控制中,在吊挂载荷较轻时,有时会采用超过额定速度而增速的
轻负荷高速运转控制,但由于超过额定速度的状态为电动机转矩降低的状态,因此,若在高速运转中联动的吊钩的载荷的分担率变化,则存在转矩不足的危险性,通常不会采用合吊联动运转时的轻负荷高速运转。
17.本发明是鉴于上述以往的利用三个以上的吊钩进行合吊联动的情况下的问题点而做出的,其目的在于提供具备用于利用三个以上的吊钩进行合吊联动的同步谐调功能的合吊联动起重机。
18.用于解决课题的方案
19.为了解决上述课题,在本发明的带同步谐调功能的合吊联动起重机中,并不是在以往的合吊联动起重机中采用的使位置、速度一致的方式,而是通过以使位置、速度在某种程度上容许一定的变化并使联动的各个卷绕提升电动机所产生的转矩均等的方式进行控制,由此,能够进行基于三个以上的吊钩的合吊联动。
20.具体而言,在利用三个以上的多个吊钩进行合吊联动的起重机中,其特征在于,针对所述多个吊钩的卷绕提升电动机的速度控制,通过分别控制成在卷绕提升时,在电动机负荷变大时速度随之变慢,在电动机负荷变小时速度随之变快,并且在卷绕下落时,在电动机负荷变大时速度随之变快,在电动机负荷变小时速度随之变慢,由此,通过分别以如下方式进行动作,即:在卷绕提升合吊联动时,载荷分担比其他吊钩大的吊钩的速度与其他吊钩相比变慢,载荷分担比其他吊钩小的吊钩的速度与其他吊钩相比变快,并且在卷绕下落合吊联动时,载荷分担比其他吊钩大的吊钩的速度与其他吊钩相比变快,载荷分担比其他吊钩小的吊钩的速度与其他吊钩相比变慢,由此,在多个吊钩的合吊联动时,使多个吊钩相互分担载荷。
21.在该情况下,针对所述多个吊钩的卷绕提升控制装置的设定,能够以如下方式进行控制:在多个吊钩的卷绕提升装置的容量为等容量的情况下,使相对于电动机负荷的速度的变化率相同,在多个吊钩的卷绕提升装置的容量不同的情况下,根据各吊钩的卷绕提升装置的容量的大小之比,将相对于电动机负荷的速度的变化率设定得较小,由此,使相对于各吊钩的卷绕提升装置的容量的负荷分担成为均等。
22.另外,在所述卷绕提升合吊联动时或卷绕下落合吊联动时,针对电动机起动时的输出速度特性,在卷绕提升时,在过负荷状态下设为不产生速度的特性,在负荷降低时设为产生低速的特性,在卷绕下落时,在负荷为零时设为不产生速度的特性,在施加负荷时设为产生低速的特性,通过在等待能够取得制动器释放后的所有吊钩的负荷分担的联动的时间之后进行加速,由此,能够防止由于作为运转信号而使用的串行通信的起重机间的接收时机的偏离、制动器释放的特性偏离等所导致的动作时机的偏离而对合吊联动的某一个卷绕提升装置施加过负荷。
23.另外,在所述卷绕提升合吊联动时或卷绕下落合吊联动时,使各个起重机暂时加速至额定速度,在各个起重机中算出能够由额定速度下的负荷转矩输出的轻负荷高速的速度,并将该速度相互发送给进行合吊联动的其他起重机,并接收从各个起重机发送的轻负荷高速的速度,在其中包含本身的起重机的轻负荷高速的速度在内的速度中,在将最慢的速度作为速度指令值进行高速运转时,在进行轻负荷高速运转时,通过分别控制成在卷绕提升时随着电动机负荷变大而速度变慢,在电动机负荷变小时速度随之变快,并且在卷绕下落时随着电动机负荷变大而速度变快,在电动机负荷变小时速度随之变慢,由此,能够具
有在轻负荷高速运转中防止负荷分担偏离的功能。
24.即,在进行联动运转时的轻负高速运转时,通过所述控制,将各吊钩的载荷分担控制为均等。
25.在该状况下,首先,使各吊钩分别加速至额定速度,对此时的各吊钩的卷绕提升电动机所产生的转矩值进行采样,并向其他起重机发送能够增速的速度。并且,在各起重机所发送的各起重机的能够增速的速度中,包括本身的起重机在内,将其中最慢的速度设定为该起重机的能够增速的速度,使各起重机高速运转。此时,通过以如下方式进行控制,即:在卷绕提升时,随着电动机负荷变大而速度变慢,在电动机负荷变小时速度随之变快,在卷绕下落时,随着电动机负荷变大而速度变快,在电动机负荷变小时速度随之变慢,从而防止各吊钩间的载荷分担率从转矩的采样时起变化,由此,防止与轻负荷高速运转中的负荷分担率的变化相伴的电动机转矩的不足。
26.另外,通过设为通过在起重机间的吊钩之间使用天平来机械地容许起重机间的联动偏离的构造,由此,能够设为采取仅起重机内的联动的构造,并提高联动的可靠性,例如能够防止在长条物产生的扭转。
27.具体而言,能够利用第一起重机的第一吊钩和邻接的第二起重机的第一吊钩对第一天平进行合吊,利用第一起重机的第二吊钩和邻接的第二起重机的第二吊钩对第二天平进行合吊,利用第一天平和第二天平吊挂第一吊挂绳索(slinging wire rope),利用第三起重机的第一吊钩和邻接的第四起重机的第一吊钩对第三天平进行合吊,利用第三起重机的第二吊钩和邻接的第四起重机的第二吊钩对第四天平进行合吊,利用第三天平和第四天平吊挂第二吊挂绳索,利用第一吊挂绳索和第二吊挂绳索来悬挂长条物的吊挂载荷。
28.发明的效果
29.根据本发明的带同步谐调功能的合吊联动起重机,能够进行三个以上的吊钩的合吊联动,并能够使各个吊钩适当地进行负荷分担,三个以上的吊钩(三台以上的起重机)针对巨大的产品、非常长的产品等,能够不会成为过负荷状态地安全地进行吊挂载荷的卷绕提升、卷绕下落。
30.由此,能够使施加于建筑物的载荷分散,或者在没有巨大的产品时,能够使起重机分散而进行多个作业,因此,起重机的作业效率提高。
31.而且,在三个以上的吊钩的合吊联动时,在电动机转矩有富余时,能够超过额定速度地运转。并且,由于能够在轻负荷高速运转中使负荷分担不产生变化,因此,可以在任一个电动机都不会成为过负荷的情况下谋求轻负荷高速运转的效率化。
附图说明
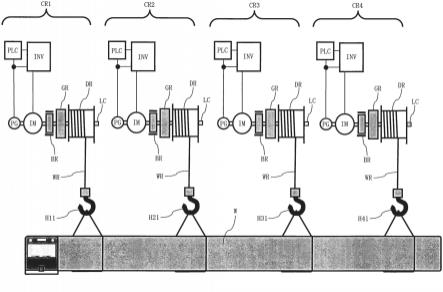
32.图1是本发明的带同步谐调功能的合吊联动起重机的整体系统的说明图。
33.图2是联动操作运转的通信形态的说明图。
34.图3是本发明的带同步谐调功能的合吊联动起重机的速度控制系统的控制框图。
35.图4是本发明的带同步谐调功能的合吊联动起重机的电动机特性的说明图。
36.图5是起动时制动器释放时的同步谐调控制的说明图。
37.图6是轻负荷高速联动运转的说明图。
38.图7是示出本发明的带同步谐调功能的合吊联动起重机的使用例的说明图。
39.图8是示出使用本发明的带同步谐调功能的合吊联动起重机的天平的使用例的说明图。
具体实施方式
40.以下,使用附图,对本发明的带同步谐调功能的合吊联动起重机的实施方式进行说明。
41.图1是本发明的带同步谐调功能的合吊联动起重机的整体系统的说明图。
42.以往,利用两个吊钩进行合吊联动。
43.这在如本实施例那样利用三个以上的数量(在本实施例中为四个)的吊钩吊起的情况下,例如在卷绕提升操作时,在一个吊钩的起动延迟时,该吊钩不分担载荷,相反地,在一个吊钩的起动变快时,四个中的其他两个吊钩不分担载荷。
44.在本发明中,在利用这样的三个以上的吊钩吊起的情况下进行负荷分担的同步谐调。
45.在此,图1的结构为四台起重机,且以在各起重机各装配有一个吊钩的结构的实施例进行了记载,但进行吊钩为三个以上的起重机的联动属于本发明的应用范围,在一台起重机装配有多个吊钩的起重机的情况或者起重机、吊钩的数量为五个以上的结构也成为本发明的应用范围。
46.在从1号起重机cr1起到4号起重机cr4的四台起重机的每一个中,基于从序列发生器plc向速度控制装置inv发送的指令,通过脉冲发生器pg的检测器的速度反馈回调来控制电动机im,电动机im的动力经由制动器br、减速器gr传递至缆线卷筒dr,利用卷绕于缆线卷筒dr的缆线绳wr悬挂吊钩,从各个起重机悬挂的四个吊钩一起对吊挂载荷w进行合吊。在各吊钩装配有对施加于各个吊钩的载荷进行检测的载荷计lc,对由各个吊钩的载荷分担不均衡导致的过载荷进行检测。然而,载荷计lc的反应速度较慢,即使在成为过载荷状态之后能够对该过载荷进行检测,也无法将成为过载荷防患于未然。
47.在本实施例中,通过由速度控制装置inv进行的电动机im的控制,将成为载荷计lc工作那样的吊钩间的载荷分担的不均衡状态防患于未然,进行吊钩间的载荷分担的同步谐调。
48.在图2中记载该起重机的联动操作运转的通信形态。
49.为了操作四台起重机,在各起重机设置有一台联动用无线控制器tcx和与之相应的联动操作用接收器rcx,当起重机驾驶员op操作联动用无线控制器tcx时,在各起重机中能够接收相同的信号。
50.并且,在各起重机cr1~cr4设置有用于供各起重机进行对比的各无线控制器tc1~tc4及各操作接收器rc1~rc4。
51.联动用无线控制器tcx能够选择使哪个起重机移动或使几台起重机移动,在未由联动用无线控制器tcx选择的起重机中,各起重机的无线控制器tc1~tc4和操作接收器rc1~rc4能够确保操作权,能够从联动运转分离而单独地移动起重机。另外,相反地,关于各起重机的无线控制器tc1~tc4和操作接收器rc1~rc4确保了操作权的起重机,相互施加了操作权的联锁,以便无法利用联动用无线控制器tcx及移动操作用接收器rcx来选择联动。
52.并且,在各起重机间的通信中设置有各起重机间通信发送器tm1~tm4及各起重机
间通信接收器rm1~rm4,进行最低限度的起重机间的信号确认。
53.作为该系统的特点,其特征在于,通过设为无线结构,从而能够容易地进行联动运转或从联动运转脱离。
54.在图3中示出本发明的带同步谐调功能的起重机的速度控制系统的控制框图。
55.利用图2记载的联动用无线控制器tcx进行联动的选择,在接收到运转指令、速度指令时,使速度控制装置inv内部的速度控制系统部分发出速度指令值v
*
,通过线性加速转换器lad,制作按照加速时间或减速时间的该瞬时的速度目标值ω
*
。从速度目标值ω
*
减去由脉冲发生器pg检测到的实际速度检测值ω而算出速度偏差量,利用自动速度设定器asr向比例控制pc输入该速度偏差量,将通过限幅器lm且切断上限而得到的值作为转矩目标值t
*
并进行电动机的电流控制。
56.由此,如图4所示,能够得到在转矩变大时速度变慢、在转矩向负侧变大时速度变快的特性。
57.若将该图4所示的特性置换为起重机的卷绕提升动作,则转矩的正侧是指卷绕提升,转矩的负侧是指卷绕下落。
58.通过将图4所示的特性赋予各电动机im,从而分别控制成在卷绕提升时,在电动机负荷变大时速度随之变慢,在电动机负荷变小时速度随之变快,并且在卷绕下落时,在电动机负荷变大时速度随之变快,在电动机负荷变小时速度随之变慢。
59.由此,通过分别以如下方式进行动作,即:在卷绕提升合吊联动时,载荷分担比其他吊钩大的吊钩的速度与其他吊钩相比变慢,载荷分担比其他吊钩小的起重机的速度与其他吊钩相比变快,并且在卷绕下落合吊联动时,载荷分担比其他吊钩大的吊钩的速度与其他吊钩相比变快,载荷分担比其他吊钩小的吊钩的速度与其他吊钩相比变慢,由此,在多个吊钩的合吊联动时,以使上述多个吊钩相互分担载荷的方式动作。
60.此时,在合吊联动的卷绕提升装置的容量为等容量的情况下,通过将各卷绕提升装置的速度控制装置的控制常数的设定设定成使图4所示的特性的斜率相同,由此,使相对于各电动机的负荷的速度的变化率相同,能够使合吊联动的各吊钩的负荷分担均等。
61.另外,在各卷绕提升装置的容量不同的情况下,通过根据各卷绕提升装置的容量的大小之比而将图4所示的特性的斜率设定得较小,从而设定成使相对于电动机的速度的变化率的负荷分担变大。由此,能够以使相对于各卷绕提升装置的容量的负荷分担成为均等的方式进行控制。
62.例如,在与卷绕提升装置的容量为两倍的装置进行合吊联动的情况下,若将该速度控制装置的图4的斜率设为一半,则能够使该卷绕提升装置的负荷分担成为两倍。
63.另外,针对联动用无线控制器tcx所发送的卷绕提升/卷绕下落指令信号,为了消除各起重机的联动操作用接收器rcx所接收到的各起重机处的微小的接收时机的偏离、各起重机的制动器的开闭时机的微小的偏离所导致的同步偏离,在卷绕提升时设为图5(2)的特性,在图5(2)的斜率特性中,将速度目标值ω
*
的值设定为在达到转矩的限幅值(通常为150%)时使速度成为零。在该状态下,在等待图5(1)所示的卷绕提升起动匹配su的时间之后转移到加速。
64.由此,与其他吊钩相比较快地进行了制动器的释放的吊钩达到转矩的限幅值(通常为150%)并以零速停止。
65.然后,若其他吊钩也打开制动器并产生卷绕提升转矩,则最初释放了制动器的吊钩的载荷分担降低,并产生卷绕提升速度,以低速的方式与其他吊钩均等地分担负荷。然后,在经过到该负荷被均等地分担为止的时间(预先设定的时间)时,转移到加速ac。
66.像这样,通过在起动时,在从零速起在低速的范围内对负荷分担进行同步谐调之后,转移到加速ac,由此,能够防止产生旋转部的惯性力等,并利用组装于图3的速度控制系统的限幅器lm,将电动机产生的转矩抑制为限幅值(通常为150%)以下的转矩,能够防止由于起动时机的偏离而施加超过转矩的限幅值的负荷,能够防止起动时机的偏离所导致的卷绕提升装置等的机械损伤。
67.另一方面,在卷绕下落时,设为图5(3)的特性,在制动器先被释放的吊钩稍微移动的状态下,负荷分担消失,在转矩为零且速度为零的状态下成为停止状态。然后,在其他吊钩的制动器被释放时,使负荷分担均等化,并对低速的速度进行同步谐调。然后,在经过图5(1)的卷绕下落起动匹配sd的预先设定的时间之后,进行加速ac。
68.由此,与卷绕提升时同样地,针对卷绕下落时的起动时机的偏离,也能够抑制为电动机所产生的转矩的限幅值(通常为150%)的范围以下的转矩,因此,能够防止卷绕提升装置等的机械损伤。
69.作为修正这样的在起动时产生的同步谐调偏离的方法,在专利文献3中记载了如下的技术:在检测到两个吊钩的位置的偏离时,对两个吊钩的速度控制装置的速度指令值v
*
赋予差或者针对在微动时、加速时检测到的位置的偏离变更线性加速转换器lad的曲线而对位置的偏离进行修正。在该技术中,由于被线性加速转换器lad支配,所以无法期待高速的同步谐调控制的响应。
70.与此相对,在进行三个以上的吊钩的同步谐调的本发明的带同步谐调功能的合吊联动起重机中,若不高速地环绕控制环路,则负荷分担的同步谐调会崩溃,因此,并不是通过速度指令值v
*
、线性加速转换器lad进行调节,而是针对通过线性加速转换器lad后的速度目标值ω
*
,利用自动速度设定器asr的高速的运算环路逐次进行与由于负荷变动而变化并输入的脉冲发生器pg的实际速度检测值ω的速度偏差量的算出,因此,能够在高速地施加修正的同时,也逐次修正在微动时、线性加速时产生的偏离。
71.在本实施例中,装配有如下的系统:在负荷较小时,利用电动机的余力而超过额定速度100%地使速度增速。
72.由于在超过额定速度时电动机的输出转矩降低,因此,负荷转矩t与速度v的关系通过式(1)而以二次方降低的方式进行限制。
73.v=(1/t)
1/2
···
式(1)
74.在进行位置、速度的同步谐调的以往的同步谐调中,在进行超过额定速度的运转时,若负荷分担变化,则存在单侧的电动机成为过负荷的风险,但在本发明的带同步谐调功能的合吊联动起重机中,由于以使负荷分担相等的方式进行同步谐调控制,所以没有上述那样的风险,能够超过额定速度而安全地动作。
75.但是,当在各起重机中使速度增速时,若各个起重机基于式(1)的计算结果来决定速度v,则由于负荷转矩t的检测误差等的影响,各起重机的速度v的值变得散乱。另外,为了统一所有起重机的轻负荷高速的速度,若将式(1)的运算结果直接在起重机之间进行通信,则通信数据量增加,因此,如图6所示,阶段性地划分为相对于t1~t5的vh1~vh5,算出vh1
~vh5中的任一个轻负荷高速的速度是否被取出或未被取出。
76.首先,在进行卷绕提升up或者卷绕下落dw时,如图5所示那样进行加速ac,在达到额定速度时,在负荷转矩检测hc的时间进行电动机输出转矩的采样。各起重机根据该采样的转矩,通过图6算出轻负荷高速vh1~vh5,并利用图2所示的各起重机间通信发送器tm1~tm4发送其结果。
77.在此,之所以以额定速度停止加速ac来进行电动机输出转矩的采样,是因为速度越快则电动机转矩的检测精度越高、与加速期间相比固定速度运转期间的电动机转矩的检测精度较高、并且与在低速下停止加速相比在更快的速度下停止加速时的相对于输送时间的负荷转矩检测hc的时间所带来的影响较小。
78.各起重机在利用各起重机间通信接收器rm1~rm4接收到轻负荷高速vh1~vh5的接收结果时,包括本身的起重机的轻负荷高速vh1~vh5在内,各起重机将这些结果中的速度最低的结果写入到卷绕提升的速度控制装置inv的速度指令值v
*
,并增速至图5所示的轻负荷高速度vhx。虽然各起重机独立地进行该处理,但由于基于相同的数据进行该处理,因此,所有起重机均导出相同的结果。
79.此时,从额定速度向轻负荷高速度vhx进行加速ac转移的各起重机的时机是各起重机利用各起重机间通信接收器rm1~rm4来接收轻负荷高速vh1~vh5的接收结果并对其施加了序列发生器plc的运算时间的时机,所有的起重机几乎同时进行向相同的轻负荷高速度vhx的加速,但时机会稍微偏离。由于该微小的时机的偏离会作为速度差而出现,因此,这会表现为负荷转矩变动,并表现为图3所示的速度目标值ω
*
与实际速度检测值ω的偏差量而由自动速度设定器asr的比例控制pc的控制吸收,能够保持各起重机的转矩分担的均衡。
80.另外,在将长条且巨大的吊挂载荷w作为对象的情况下,除了图1所示的方式之外,如图7所示,有时还使用具备四台起重机cr1~cr4、分别搭载于各起重机cr1~cr4上的两台绞车(日文:
クラブ
)的缆线卷筒dr11~dr42及吊挂于缆线卷筒dr11~dr42的吊钩h11~h42的设备。
81.而且,为了提升起重机间的同步谐调的可靠性,如图8所示,能够使用天平。
82.具体而言,关于1号起重机cr1和2号起重机cr2,11号吊钩h11与12号吊钩h12的位置偏离由1号天平bl1机械地消除,21号吊钩h21与22号吊钩h22的位置偏离由2号天平bl2机械地消除。
83.另外,关于3号起重机cr3和4号起重机cr4,31号吊钩h31与41号吊钩h41的位置偏离由3号天平bl3机械地消除,32号吊钩h32与42号吊钩h42的位置偏离由4号天平bl4机械地消除。
84.并且,对于1号起重机cr1及2号起重机cr2的群组与3号起重机cr3及4号起重机cr4的群组之间的位置偏离而言,利用由1号天平bl1及2号天平bl2吊挂的吊挂缆线(slinging wire)1sl1和由3号天平bl3及4号天平bl4吊挂的吊挂缆线2sl2进行吊挂的吊挂载荷w本身会成为天平而将位置偏离消除。
85.由此,针对联动用无线控制器tcx的运转信号,能够机械地消除基于各起重机搭载的联动操作用接收器rcx的起重机间的接收偏离、各起重机间的通信的收发器的起重机间的接收偏离等的起重机间的偏离原因。
86.然而,在利用图8所示的天平机械地消除起重机间的位置偏离的方法中,也无法机械地消除起重机内部的例如11号吊钩h11与12号吊钩h12之间的位置偏离。例如,在同步谐调发生偏离且相对于11号吊钩h11而12号吊钩h12的位置变高的情况下,在吊挂载荷w为较轻的物体的情况下,会在吊挂载荷w与吊挂缆线1sl1之间产生滑移,由于其摩擦,会损伤吊挂载荷w、吊挂缆线1sl1,或者,在吊挂载荷w为没有扭转耐力的物体的情况下,在吊挂缆线1sl1与吊挂缆线2sl2之间会扭转吊挂载荷w而使吊挂载荷w歪斜,或者,在吊挂载荷w为较重且耐扭转性也强的物体的情况下,12号吊钩h12、22号吊钩h22、31号吊钩h31及41号吊钩h41会成为过负荷。
87.在由该图8的天平构成的方式中,也是通过使用本发明的同步谐调功能,从而针对欲使所述吊挂载荷w与吊挂缆线之间滑移的力、欲使吊挂载荷w扭转的力、因扭转而欲产生过负荷的力,在取得负荷分担的均衡的方向上发挥同步谐调效果,因此,能够防止产生吊挂载荷w与吊挂缆线间的滑移、吊挂载荷w的扭转、过负荷。
88.像这样,通过使用本发明的带同步谐调功能的合吊联动起重机,即使是三个以上的多个吊钩,也能够进行合吊同步谐调,例如,如图1、图7及图8所示,通过利用四台起重机来对吊挂载荷w进行吊挂,能够将起重机和吊挂载荷的载荷施加于建筑物的载荷分散到建筑物的宽广的范围。
89.另外,通过利用台数较多的起重机进行吊挂,从而能够使一台起重机的尺寸变小,也能够使建筑物的顶棚变小,或者能够使起重机的吊钩靠近建筑物的端部。另外,由于在吊挂载荷成为较大的集合体之前由较小的物体进行组装,因此,在为最终组装前的较小的块时,能够对起重机进行分割而进行作业,在图7及图8的实施例中,由于能够分散到四个部位而进行作业,因此,能够使作业效率变高。
90.另外,对于本发明的带同步谐调功能的合吊联动起重机而言,无论是在为两台起重机的情况下,还是在为三台起重机、四台起重机或者四台以上的台数的情况下,由于能够同样地增加起重机的台数并且对各个起重机进行负荷分担的同步谐调,因此,针对伴随着作业的进展状态而重量增加的吊挂载荷,能够一边依次增加起重机的台数,一边高效地对作业进行推进。
91.本发明的带同步谐调功能的合吊联动起重机的特征在于,合吊联动的起重机的卷绕提升装置彼此并不是一边交换信号一边进行同步谐调,而是使各个卷绕提升装置独立地以与其他卷绕提升装置相匹配的方式进行动作,由于在独立的起重机的内部以闭合的方式进行控制,因此,能够加入到合吊联动起重机中、或成为单独动作的起重机、或者变更合吊联动起重机的台数,成为了容易自如地变更的系统。
92.以上,关于本发明的带同步谐调功能的合吊联动起重机,基于本实施例进行了说明,但本发明并不限定于上述实施例记载的结构,能够在不脱离其主旨的范围适当地对其结构进行变更。
93.工业上的可利用性
94.根据本发明的带同步谐调功能的合吊联动起重机,由于能够通过三个以上的吊钩的合吊来进行负荷分担的同步谐调,因此,能够使多个较小的起重机联动而对较大的吊挂载荷进行吊挂,伴随于此,与利用两台起重机进行吊挂的情况相比,具有使施加于建筑物的载荷分散、改善起重机的靠近尺寸、能够降低建筑物的顶棚、或者在吊挂载荷成为较大的集
合体之前能够将起重机分散而进行作业等各种优点,工业上的利用价值非常高。
95.附图标记说明
96.cr1 1号起重机
97.cr2 2号起重机
98.cr3 3号起重机
99.cr4 4号起重机
100.h11 11号吊钩
101.h12 12号吊钩
102.h21 21号吊钩
103.h22 22号吊钩
104.h31 31号吊钩
105.h32 32号吊钩
106.h41 41号吊钩
107.h42 42号吊钩
108.w 吊挂载荷
109.wr 缆线绳
110.dr 缆线卷筒
111.lc 载荷计
112.gr 减速器
113.br 制动器
114.im 电动机
115.inv 速度控制装置
116.pg 脉冲发生器
117.plc 序列发生器
118.op 起重机驾驶员
119.tcx 联动用无线控制器
120.tc1 1号无线控制器
121.tc2 2号无线控制器
122.tc3 3号无线控制器
123.tc4 4号无线控制器
124.rcx 联动操作用接收器
125.rc1 1号操作接收器
126.rc2 2号操作接收器
127.rc3 3号操作接收器
128.rc4 4号操作接收器
129.tm1 1号起重机间通信发送器
130.tm2 2号起重机间通信发送器
131.tm3 3号起重机间通信发送器
132.tm4 4号起重机间通信发送器
133.rm1 1号起重机间通信接收器
134.rm2 2号起重机间通信接收器
135.rm3 3号起重机间通信接收器
136.rm4 4号起重机间通信接收器
[0137]v* 速度指令值
[0138]
lad 线性加速转换器
[0139]
ω
* 速度目标值
[0140]
ω 实际速度检测值
[0141]
asr 自动速度设定器
[0142]
pc 比例控制
[0143]
lm 限幅器
[0144]
t
* 转矩目标值
[0145]
t 负荷转矩
[0146]
bra 制动器开闭
[0147]
brc 制动器闭
[0148]
bro 制动器开
[0149]
su 卷绕提升起动匹配
[0150]
sd 卷绕下落起动匹配
[0151]
up 卷绕提升
[0152]
dw 卷绕下落
[0153]
ac 加速
[0154]
dc 减速
[0155]
hc 负荷转矩检测
[0156]
vhx 轻负荷高速度
[0157]
v 速度
[0158]
t1 转矩值1(25%)
[0159]
t2 转矩值2(35%)
[0160]
t3 转矩值3(45%)
[0161]
t4 转矩值4(60%)
[0162]
t5 转矩值5(75%)
[0163]
vh1 轻负荷高速1(200%)
[0164]
vh2 轻负荷高速2(169%)
[0165]
vh3 轻负荷高速3(149%)
[0166]
vh4 轻负荷高速4(129%)
[0167]
vh5 轻负荷高速5(115%)
[0168]
dr11 1号缆线卷筒1
[0169]
dr12 1号缆线卷筒2
[0170]
dr21 2号缆线卷筒1
[0171]
dr22 2号缆线卷筒2
[0172]
dr31 3号缆线卷筒1
[0173]
dr32 3号缆线卷筒2
[0174]
dr41 4号缆线卷筒1
[0175]
dr42 4号缆线卷筒2
[0176]
bl1 1号天平
[0177]
bl2 2号天平
[0178]
bl3 3号天平
[0179]
bl4 4号天平
[0180]
sl1 吊挂缆线1
[0181]
sl2 吊挂缆线2
[0182]
sl3 吊挂缆线3
[0183]
sl4 吊挂缆线4。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1