一种用于大型遥控行吊的吊钩可视化系统及其使用方法与流程
1.本发明属于起重设备安全附件技术领域,具体涉及一种用于大型遥控行吊的吊钩可视化系统及其使用方法。
背景技术:
2.大型遥控行吊是一种广泛应用于室外的货场、料场货、散货装卸作业的重型机械设备,具有场地利用率高、额定载重量大、起重高度大、通用性强等特点。行吊的小车纵向运动,大车横向运动,作业范围广。当前,行吊在吊运时,主要通过作业人员通过周围监控去判断识别作业区域是否存在行人、车辆及其他物品等障碍物,是否存在因货物跌落造成人员、财产损失等风险,但是由于距离较远,无法看清吊钩的实时状态,存在一定的安全隐患。
技术实现要素:
3.有鉴于此,本发明提供了一种用于大型遥控行吊的吊钩可视化系统及其使用方法,能够实时跟踪并可视化显示吊钩的状态,有助于操作人员及时发现行吊运行区域可能发生的安全隐患,确保遥控作业安全。
4.本发明是通过下述技术方案实现的:
5.一种用于大型遥控行吊的吊钩可视化系统,所述吊钩可视化系统包括:监控相机、测距组件、控制模块、视频无线传输模块及终端组件;
6.所述监控相机、控制模块和视频无线传输模块均安装在大型遥控行吊的小车上;所述测距组件安装在大型遥控行吊的起重电机上,用于测量起重电机正下方的吊钩与起重电机之间的距离,并将测量得到的测距参数发送给控制模块;所述控制模块用于根据所述测距参数控制监控相机的镜头始终对准吊钩,所述监控相机用于对吊钩进行实时拍摄,并将实时拍摄得到的视频数据通过视频无线传输模块实时传送到终端组件进行储存和显示。
7.进一步的,所述监控相机采用一体化云台相机,由云台带动监控相机沿垂直方向旋转;控制模块根据所述测距参数控制监控相机的镜头始终对准吊钩时,通过控制监控相机沿垂直方向旋转并调整监控相机的焦距使其镜头始终对准吊钩。
8.进一步的,所述测距组件包括激光测距传感器和激光反射板;
9.所述激光测距传感器安装在起重电机上,所述激光反射板安装在吊钩上;
10.所述激光反射板用于接收激光测距传感器发出的激光并将该激光再反射至激光测距传感器,激光测距传感器用于根据接收到的反射到的激光,测量激光反射板与激光测距传感器之间的距离,激光反射板与激光测距传感器之间的距离等同于起重电机正下方的吊钩与起重电机之间的距离,并将测量得到测距参数发送给控制模块。
11.进一步的,所述终端组件包括硬盘录像机和显示器;
12.所述硬盘录像机和显示器位于操作人员所在的控制间;
13.所述硬盘录像机用于实时接收视频无线传输模块传输的监控相机的视频数据,并保存所述视频数据,还将所述视频数据输出到所述显示器上,显示器对所述视频数据进行
实时显示,形成监控画面,对大型遥控行吊的吊钩进行实时监控。
14.进一步的,所述视频无线传输模块采用无线微波移动视频传输系统,由发射线和接收端组成,发射端与监控相机相连,接收端与终端组件相连。
15.进一步的,所述激光反射板采用大蜂窝型反射板。
16.一种用于大型遥控行吊的吊钩可视化系统的使用方法,基于上述吊钩可视化系统,所述使用方法具体步骤如下:
17.步骤s1:控制模块采集激光测距传感器到激光反射板的距离l1;
18.步骤s2:根据已知监控相机与激光测距传感器的距离l2和已知l2所在边与l1所在边的夹角α,控制模块自动计算监控相机与激光反射板中心的距离l3及l2所在边和l3所在边之间的夹角β,计算公式如下:
[0019][0020][0021]
步骤s3:根据步骤s2计算得到的距离l3及夹角β,控制模块调整监控相机沿垂直方向旋转,直到监控相机的镜头轴线与l2所在边的夹角达到β,同时,控制模块调整监控相机的焦距,直到监控相机的镜头与激光反射板中心之间的距离达到l3;
[0022]
步骤s4:调整完监控相机的镜头后,监控相机对吊钩进行实时拍摄,并将实时拍摄得到的视频数据发送给视频无线传输模块;视频无线传输模块把监控相机的视频数据实时传送到硬盘录像机,硬盘录像机将视频数据保存,并将视频数据输出到显示器上,显示器对视频数据进行实时显示,形成监控画面,实现对大型遥控行吊的吊钩的实时监控。
[0023]
有益效果:
[0024]
(1)本发明提供的一种用于大型遥控行吊的吊钩可视化系统,测距组件能够测量起重电机正下方的吊钩与起重电机之间的距离,并将测量得到的测距参数发送给控制模块,控制模块根据所述测距参数控制监控相机的镜头始终对准吊钩,所述监控相机对吊钩进行实时拍摄,并将实时拍摄得到的视频数据通过视频无线传输模块实时传送到终端组件进行储存和显示,实现对大型遥控行吊的吊钩的实时监控,适合大型遥控行吊的吊钩可视化,结构合理,能够实时跟踪并可视化显示吊钩的状态,有助于操作人员及时发现行吊运行区域可能发生的安全隐患,确保作业安全。
[0025]
(2)本发明的监控相机采用一体化云台相机,由云台带动监控相机沿垂直方向旋转,便于控制模块调整监控相机的镜头始终对准吊钩,且提高了对监控相机的调整精度。
[0026]
(3)本发明的测距组件包括激光测距传感器和激光反射板,通过激光测距传感器和激光反射板的配合实现对激光反射板与激光测距传感器之间的距离测量,由于激光测距传感器安装在起重电机上,所述激光反射板安装在吊钩,因此,激光反射板与激光测距传感器之间的距离等同于起重电机正下方的吊钩与起重电机之间的距离,实现对吊钩位置的实时测量,便于后续控制模块对监控相机的调整。
[0027]
(4)本发明的视频无线传输模块采用无线微波移动视频传输系统,传输距离远,抗干扰能力强,克服了由于大型遥控行吊的横向和纵向运动范围大,现有的传输方法可能无法传输的问题;激光反射板采用为大蜂窝型反射板,能够实现远距离接收并反射激光。
[0028]
(5)本发明提供的一种用于大型遥控行吊的吊钩可视化系统的使用方法,操作便捷,监控过程通过程序控制自动完成,无需人为干预,大大提高工作和管理效率,能够实时跟踪并可视化显示吊钩的状态,确保遥控作业安全,提高现场无人化管理水平。
附图说明
[0029]
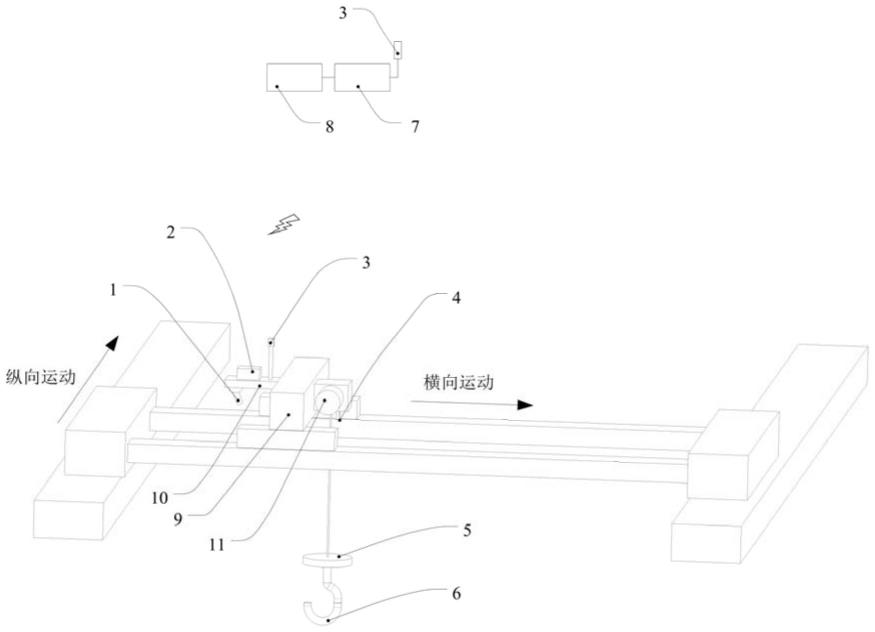
图1为本发明的吊钩可视化系统的结构组成图;
[0030]
图2为本发明的吊钩可视化系统的使用方法的原理图;
[0031]
其中,1-监控相机,2-控制模块,3-视频无线传输模块,4-激光测距传感器,5-激光反射板,6-吊钩,7-硬盘录像机,8-显示器,9-小车,10-悬臂,11-起重电机。
具体实施方式
[0032]
下面结合附图并举实施例,对本发明进行详细描述。
[0033]
实施例1:
[0034]
本实施例提供了一种用于大型遥控行吊的吊钩可视化系统,参见附图1,大型遥控行吊包括:行吊架体、小车9、悬臂10、起重电机11及吊钩6;小车9安装在行吊架体的横梁上,悬臂10和起重电机11均安装在小车9上,吊钩6通过吊绳与起重电机11连接,吊钩6位于起重电机11的正下方;
[0035]
吊钩可视化系统用于对大型遥控行吊进行监控,参见附图1,吊钩可视化系统包括:监控相机1、激光测距传感器4、激光反射板5、控制模块2、视频无线传输模块3、硬盘录像机7及显示器8;
[0036]
监控相机1采用带云台可以旋转的一体化云台相机,由云台带动监控相机1沿垂直方向旋转,支持高清光学变焦;监控相机1、控制模块2和视频无线传输模块3均安装在小车9的悬臂10上;激光测距传感器4安装在吊钩6正上方的起重电机4上,激光反射板5安装在吊钩6上;硬盘录像机7和显示器8位于操作人员所在的控制间;
[0037]
激光反射板5用于接收激光测距传感器4发出的激光并将该激光再反射至激光测距传感器4,激光测距传感器4用于根据接收到的反射到的激光,测量激光反射板5与激光测距传感器4之间的距离,等同于测量起重电机4与吊钩6之间的距离,并将测量结果(即测距参数)发送给控制模块2;
[0038]
控制模块2用于根据激光测距传感器4的测距参数,控制监控相机1沿垂直方向旋转并调整监控相机1的焦距使其镜头始终对准吊钩6,监控相机1用于对吊钩6进行实时拍摄,并将实时拍摄得到的视频数据发送给视频无线传输模块3;
[0039]
视频无线传输模块3把监控相机1的视频数据实时传送到硬盘录像机7上,硬盘录像机7将视频数据保存,并将视频数据输出到显示器8上,显示器8对视频数据进行实时显示,形成监控画面,实现对大型遥控行吊的吊钩6的实时监控。
[0040]
其中,激光测距传感器4的有效检测距离可达100m,响应时间小于0.05秒。
[0041]
激光反射板5为大蜂窝型专用反射板,用以实现远距离接收并反射激光。
[0042]
由于大型遥控行吊的横向和纵向运动范围大,视频无线传输模块3采用无线微波移动视频传输系统,传输距离远,抗干扰能力强,由发射线和接收端组成,发射端与监控相机1相连,接收端与硬盘录像机7相连。
[0043]
实施例2:
[0044]
本实施例在实施例1的基础上,提供一种用于大型遥控行吊的吊钩可视化系统的使用方法,其具体步骤如下:
[0045]
步骤s1:控制模块2采集激光测距传感器4到激光反射板5的距离,一般每秒内测量3次并取平均值l1;
[0046]
步骤s2:参见附图2,根据已知监控相机1与激光测距传感器4的距离l2和已知l2所在边与l1所在边的夹角α,控制模块2自动计算监控相机1与激光反射板5中心的距离l3及l2所在边和l3所在边之间的夹角β,计算公式如下:
[0047][0048][0049]
步骤s3:根据步骤s2计算得到的距离l3及夹角β,控制模块2调整监控相机1沿垂直方向旋转,直到监控相机1的镜头轴线与l2所在边的夹角达到β,同时,控制模块2调整监控相机1的焦距,直到监控相机1的镜头与激光反射板5中心之间的距离达到l3;
[0050]
步骤s4:调整完监控相机1的镜头后,监控相机1对吊钩6进行实时拍摄,并将实时拍摄得到的视频数据发送给视频无线传输模块3;视频无线传输模块3把监控相机1的视频数据实时传送到硬盘录像机7,硬盘录像机7将视频数据保存,并将视频数据输出到显示器8上,显示器8对视频数据进行实时显示,形成监控画面,实现对大型遥控行吊的吊钩6的实时监控。
[0051]
综上,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1