一种适用于自动化生产线的智能吊具调控方法和装置与流程
本发明涉及自动化生产领域,特别涉及一种适用于自动化生产线的智能吊具调控方法和装置。
背景技术:
1、目前,自动化生产线里会采用到大量的智能吊具,智能吊具、机械手等自动化装备因其自身的诸多优势在制造业领域得到空前发展,但是当前负载平衡吊具在实用过程中存在大量外部干扰,影响着自动化生产的效率。
2、因此,亟需一种解决办法。
技术实现思路
1、本发明公开提出一种适用于自动化生产线的智能吊具调控方法和装置,提高了智能吊具的抗干扰能力和生产效率。
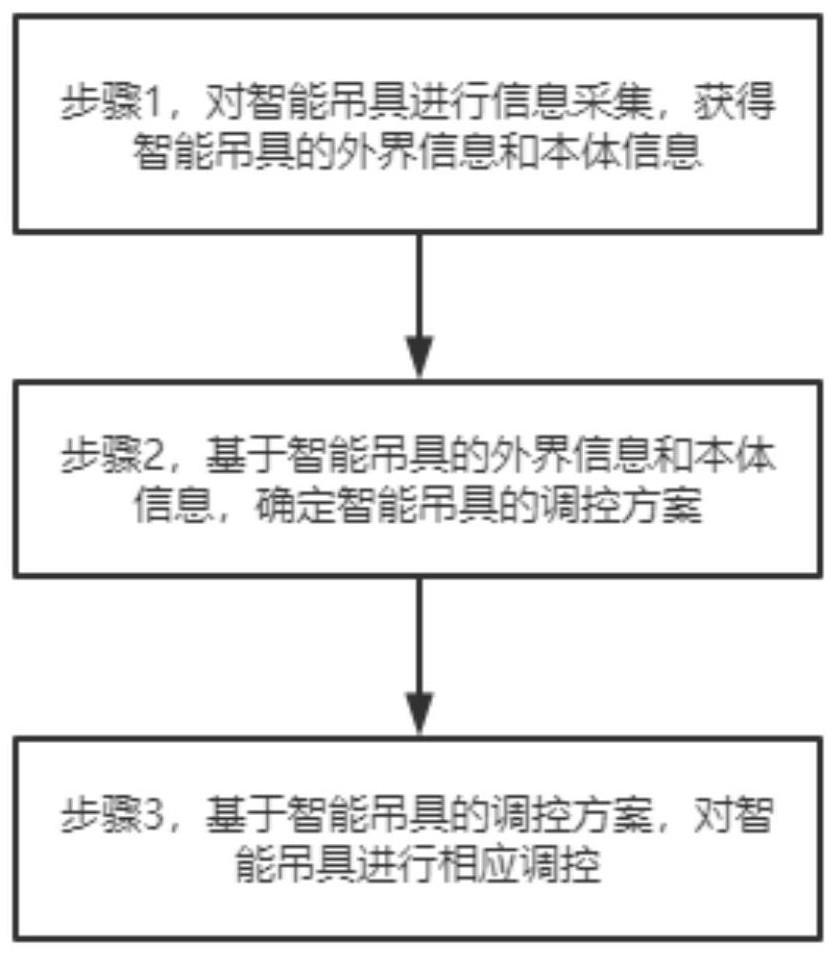
2、本发明提供智能吊具一种适用于自动化生产线的智能吊具调控方法,包括:
3、步骤1,对智能吊具进行信息采集,获得智能吊具的外界信息和本体信息;
4、步骤2,基于智能吊具的外界信息和本体信息,确定智能吊具的调控方案;
5、步骤3,基于智能吊具的调控方案,对智能吊具进行相应调控。
6、优选的,所述外界信息为智能吊具的外界图像信息,所述本体信息为智能吊具的关节角度信息和受力信息,所述调控方案包括第一调控方案、第二调控方案、第三调控方案。
7、优选的,获取智能吊具的位置信息后,还包括:
8、基于智能吊具的外界信息,获取智能吊具的位置信息;
9、基于所述位置信息对确定智能吊具的工作状态;
10、若所述工作状态为智能吊具处于物料抓取区,则对智能吊具进行第一调控;
11、若所述工作状态为智能吊具处于运输区,则对智能吊具进行第二调控;
12、若所述工作状态为智能吊具处于物料投放区,则对智能吊具进行第三调控。
13、优选的,对智能吊具进行第二调控,包括:
14、基于所述智能吊具的受外力信息确定智能吊具抓取变形量,并基于负载抓取变形量确定平衡补偿量;
15、基于所述位置信息确定智能吊具的位置补偿量;
16、基于平衡补偿量和位置补偿量,对智能吊具进行所述第二调控。
17、在本实施例中,受外力信息为智能吊具所受到的外力。
18、优选的,基于智能吊具的外界信息,获取智能吊具的位置信息,包括:
19、基于外界图像信息确定所述智能吊具在外界图像信息中的第一定位信息;
20、基于所述第一定位信息对外界图像信息进行去除处理,得到第一背景图像;
21、将所述第一背景图像与预设的投放图像进行匹配,根据匹配结果,确定所述第一背景图像在基准图像上第二定位信息;
22、根据所述所述第二定位信息,确定智能吊具的位置信息。
23、优选的,对智能平台进行第一调控,包括:
24、对所述外界图像信息进行边缘检测,获得物料边缘线;
25、基于所述物料边缘线对所述外界图像信息进行截取,获得物料区域;
26、基于预设的边缘算法对所述物料区域进行处理,获得待抓取物体的分界线;
27、基于待抓取物体的分界线进行分界点集合构建,获得物体分界点集合;
28、基于预设的检测算法对所述物体分界点集合中每一子分界点进行检测,若子分界点通过检测,则将子分界点标记为子可抓取点,从而获得子可抓取点集合,若子分界点未通过检测,则不对该子分界点进行标记;
29、基于所述外界图像信息的中心点建立图像坐标系,从而获得所述子可抓取点集合中的每一子可抓取点在图像坐标系下的子第一坐标;
30、基于预设的转换规则将所述子第一坐标转换至预设智能吊具坐标系中,获得每一子可抓取点在智能吊具坐标系中的子第二坐标;
31、检测所述每一子可抓取点的子第二坐标是否在预设的可达范围中:若子第二坐标在所述可达范围内,则将对应的子可抓取点标记为子可达抓取点;
32、基于子可达抓取点选择目标抓取点,包括:
33、若只存在一个子可达抓取点,则将该子可达抓取点确定为目标抓取点;
34、若存在多个子可达抓取点,则基于预设的评分规则计算每一子可达抓取点的子可靠分,并将子可靠分最高的子可达抓取点确定为目标抓取点;
35、若不存在子可达抓取点,则计算子可抓取点与所述智能吊具的距离,获得每一子可抓取点与所述智能吊具的子距离;
36、基于所述子距离的最小值所对应的子可抓取点确定为目标抓取点,并将所述目标抓取点相对于智能吊具的方向确定为预移动方向;
37、基于所述目标抓取点和预移动方向确定第一调控方案。
38、优选的,对物料进行第三调控,包括:
39、当所述智能吊具进入投放区域时,将所述智能吊具的外界图像信息转换至预设的标准投放坐标系,从而获得智能吊具的实际位置;
40、判断所述智能吊具的实际位置与标准投放位置是否一致;
41、若一致,则准许投放物料;
42、若不一致,则计算智能吊具的实际位置与标准投放位置之间的误差距离;
43、基于误差距离和智能吊具的实际位置,生成第三调控方案。
44、优选的,对智能吊具进行第二调控,包括:
45、基于所述智能吊具的关节角度信息确定所述智能吊具的外力信息;
46、将智能吊具的关节角度信息和外力信息代入预设模型,获得智能吊具的抓取矩阵;
47、基于所述智能吊具的抓取矩阵,确定智能吊具的抓取变形量;
48、基于所述抓取变形量,确定智能吊具的第一平衡补偿量;
49、在所述第一背景图像中进行特征点检测,获得若干子第一目标特征点,并基于预设连接规则对所述子第一目标特征点进行连接,获得连接区域,并将连接区域作为第一区域;
50、确定每一所述子第一目标特征点的子第一特征向量,根据所述子第一特征向量在预设的标准图像中确定第二区域;
51、将所述第一背景图像和所述第二区域由三色色彩空间转换至视觉色彩空间,然后对视觉色彩空间下的所述第一背景图像和所述第二区域分别进行色彩平衡处理;
52、获取经过色彩平衡处理后的所述第二区域内像素点的第二特征向量;
53、获取经过色彩平衡处理后的所述第一背景图像内的所述第一目标特征点的第三特征向量;
54、将每一子第一目标特征点的第三特征向量分别与第二区域内像素点的第二特征向量进行匹配:计算所述第三特征向量与所述第二特征向量之间的距离值,将距离值最小的第二特征向量对应的像素点,作为对应第一目标特征点的匹配像素点,并将所述对应的像素点作为第二目标特征点,从而获得若干子第二目标特征点;
55、基于基于预设连接规则对子第二目标特征点进行连接,获得连接区域,并将连接区域作为第三区域;
56、计算所述第一区域与所述第三区域的匹配度,并判断所述匹配度是否大于预设匹配度,在确定所述匹配度大于预设匹配度时,将所述第一背景图像中的第一区域与基准图像中的第三区域进行重合铺设,确定所述第一背景图像在基准图像上第二定位信息;
57、基于所述所述第二定位信息,确定智能吊具的位置信息;
58、基于所述智能吊具的位置信息确定智能吊具的平衡修正量;
59、基于所述平衡修正量对所述第一平衡补偿量进行修正,获得第二平衡补偿量;
60、基于所述第二平衡补偿量生成第二调控方案。
61、优选的,获得智能吊具抓取的实际坐标后,包括:
62、将智能吊具抓取的实际坐标与标准坐标进行对比,获得智能负载抓取的偏移值;
63、将所述智能负载抓取的偏移值代入预设的智能负载模型中,获得所述智能负载的质心坐标;
64、基于所述智能负载的质心坐标和预设的支撑投影面积,确定所述智能负载的第一平衡度;
65、基于所述智能负载抓取的偏移值和外受力信息,建立所述智能吊具的理论方程;
66、基于所述智能吊具的理论方程,计算所述智能吊具的本体对抓取手的理论力矩;
67、将所述智能负载的质心坐标和第一平衡度以及智能吊具的外受力信息代入预设的智能负载模型中,确定所述智能吊具的本体对抓取手的最大力矩;
68、根据所述理论力矩和所述最大力矩的关系,判断所述智能吊具是否会失衡;
69、若智能吊具会失衡,则停止运输物料,并进行报警;
70、若智能吊具不会失衡,则不进行报警。
71、本发明提供智能吊具一种适用于自动化生产线的智能吊具平衡装置,包括
72、采集模块,用于对智能吊具进行信息采集,获得智能吊具的外界信息和本体信息;
73、处理模块,用于基于智能吊具的外界信息和本体信息,确定智能吊具的调控方案;
74、调控模块,用于基于智能吊具的调控方案,对智能吊具进行相应调控。
75、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
76、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!