一种前移式AGV堆高车的制作方法
本发明涉及工业运输车相关领域,具体为一种前移式agv堆高车。
背景技术:
1、在叉车应用领域,堆高车按特性及功能可分为平衡重式叉车、前移式叉车、侧叉式叉车三种基本类型,本领域为前移式叉车,前移式叉车的门架或者货叉架可以前后移动,兼具平衡重、堆垛车的优点。当门架前伸至最前端时,载荷重心落在支点的外侧,此时相当于平衡重式叉车;当门架完全收回后,载荷重心落在支点内侧,此时相当于电动堆垛车。激光雷达传感器被用于帮助平衡重式叉车agv完全自主地应对复杂、未知的环境,使之具备精细的环境感知能力。
2、伴随市场的不断扩大,以及技术的不断提升,前移式堆高车慢慢的由有人操作到无人自动驾驶转换,具有作业灵活、效率高,节能环保等特点,但是国内目前的产品同质化竞争严重,产品缺乏创新,性能与国外产品存在相当大的差距。
技术实现思路
1、本发明的目的在于提供一种前移式agv堆高车,以解决上述背景技术中提出的问题。
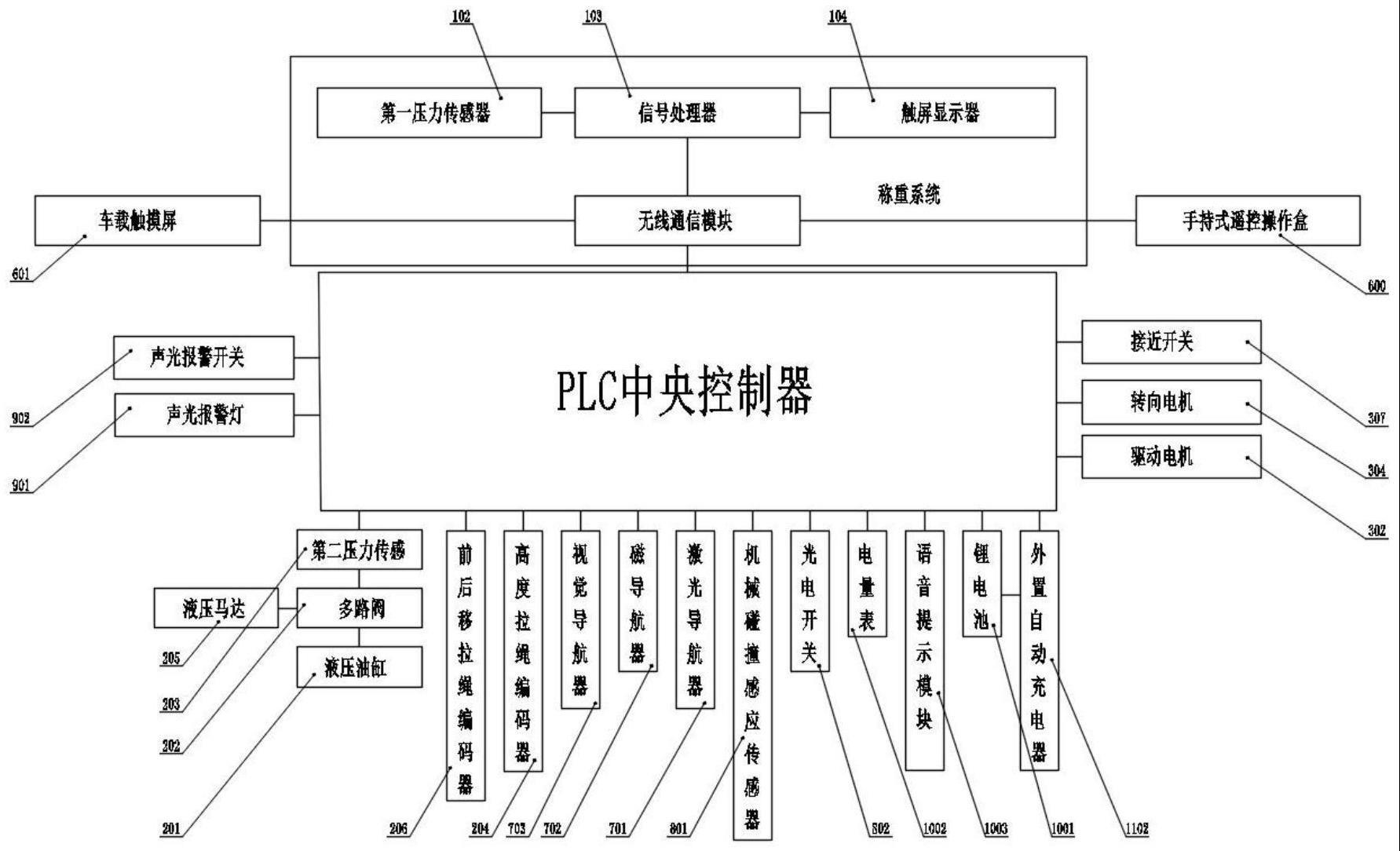
2、为实现上述目的,本发明提供如下技术方案:一种前移式agv堆高车,包括车架,所述车架中设有用于控制和协调托盘搬运车运行的plc中央控制器,所述车架中安装有用于无线传输的无线通信模块,所述车架前侧安装有用于对装载在无线称重货叉上的货物进行无线称重的无线称重机构,所述车架中部安装有用于将货叉起升、降下或是前后移动的液压机构,所述车架的下面安装有驱动的托盘搬运车的驱动机构,所述车架上安装有用于自动调节平衡轮的减震机构,所述车架内部安装有用于整合内部控制单元的电控板,所述车架上配置有用于遥控控制的手持式遥控操作盒,所述车架中安装有进行运行路径进行导航的引导机构,所述车架中安装有帮助托盘搬运车避障的避障机构,所述车架中安装有发出警报的警示机构,所述车架中安装有为托盘搬运车提供动力来源的动力机构。
3、作为优选,所述无线称重机构包括无线称重货叉、压力传感器、信号处理器和触屏显示器,每个所述无线称重货叉上分别前后对称的安装有两个所述压力传感器,每个所述压力传感器分别与所述信号处理器之间连接有电信号传输线,所述触屏显示器与所述信号处理器之间相连接,所述信号处理器和所述触屏显示器通过所述无线通信模块分别与所述plc中央控制器连接,当无线称重货叉将货物叉起并装载在无线称重货叉上之后,对无线称重货叉进行举升过程中,压力传感器采集到无线称重货叉产生的压力信号并将压力信号转换为电信号,压力传感器将电信号传输给信号处理器,信号处理器将电信号转变为数字信号并通过无线通信模块将数字信号传输给plc中央控制器,plc中央控制器依据信号处理器对数字信号进行数据处理并获得举升重量值,触屏显示器通过无线通信模块读取并显示举升重量值;触屏显示器为数字式触屏显示器,数字式触屏显示器采用位lcd数字式触屏显示器,内置可充电电池,具有零点自动跟踪、零位异常指示、超载报警等功能,还具有自动省电模式和低压自动关机保护功能,也具有调试快速便捷的特点;无线称重货叉包括设在车架底部的锻打货叉、设在锻打货叉上面的覆盖式货叉,货物装载在覆盖式货叉上面,第一压力传感器内置在锻打货叉内侧,信号处理器连接在覆盖式货叉上;在货物被叉起并装载在覆盖式货叉上的工作过程中,由于锻打货叉位于覆盖式货叉下面而压力传感器安装在锻打货叉内侧,于是第一压力传感器采集到的货物的重量信号来自于由货物对覆盖式货叉的压力传递到锻打货叉的压力,避免了压力传感器直接受货物的重压及冲击带来的损坏甚至毁坏,保护了压力传感器,提高了称重精确性。
4、作为优选,所述液压机构中包括固定设置在所述车架上并且驱动所述无线称重货叉起升的液压油缸、多路阀块、第二压力传感器、高度拉绳编码器、液压马达、前后移拉绳编码器、限位块和带动齿条,所述液压油缸上固定设有所述多路阀块,所述多路阀块上连接有用于实时监测液压油缸管路内油压大小的第二压力传感器,所述无线称重货叉上连接有对无线称重货叉的高度位置进行定位的高度拉绳编码器,所述第二压力传感器和所述高度拉绳编码器分别与所述plc中央控制器连接,液压油缸、多路阀块、第二压力传感器、高度拉绳编码器组合形成的起升功能,使无线称重货叉可在任意位置精准启动或停止,达到了精确操作、自动起升及搬运的效果;通过预先设定起升高度,同时通过第二压力传感器实时监测液压油缸管路内的油压大小情况,大大提高了货物装载高度的准确性和柔性;高度拉绳编码器的一端固定连接在高度不变的外门架上,高度拉绳编码器的另一端固定连接在货叉架上;该结构设置,既提高了装载及起升货物的稳固性、牢靠性和便利性,又便于安装液压油缸、多路阀块、第二压力传感器、高度拉绳编码器,节省了有限的车体空间。
5、作为优选,所述车架前侧安装设有门架,所述车架中左右对称的固定设有带动齿条,所述车架的前侧左右对称的固定设有所述限位块,所述门架上左右对称的固定安装有液压马达,每个所述液压马达上分别转动设有带动齿轮,每个所述带动齿轮分别与所述带动齿条啮合,所述限位块能够限定所述门架的移动范围,从而通过所述液压马达通过带动小齿轮旋转,在安装于车架上的齿条上前后移动,来实现门架的前后移动,液压马达带动齿轮齿条啮合实现前后移动,比较传统的油缸传动具有定位精确,容易控制的优点,大大提高了堆高车的操控性能。
6、作为优选,所述驱动机构中包括设置在所述车架车架上的驱动座、驱动电机、变速箱、转向电机、主动齿轮、从动齿轮和接近开关,所述驱动座上固定设有所述驱动电机,所述驱动座的下侧转动设有所述从动齿轮,所述从动齿轮下侧固定设有所述变速箱,所述变速箱上安装有驱动轮,所述驱动电机能够通过所述变速箱驱动所述驱动轮,所述驱动座上固定设有所述转向电机,所述转向电机中转动设有主动齿轮,所述主动齿轮与所述从动齿轮之间啮合,所述驱动座上安装有所述接近开关,所述接近开关连接在所述驱动轮上,所述驱动电机、所述转向电机和所述接近开关分别与所述plc中央控制器连接,在agv托盘搬运车工作过程中,当需要对agv托盘搬运车进行转向时,控制器设定转向角度,接近开关感应到驱动轮的初始位置并使驱动轮摆正,plc中央控制器依据设定的转向角度启动转向电机,转向电机驱动主动齿轮同时转动,主动齿轮带动从动齿轮同时转动,从动齿轮带动变速箱及驱动轮以设定的角度转向,实现了对驱动轮的驱动控制和转向角度的精确控制。
7、作为优选,所述减震机构中包括平衡轮总成、增力油缸、制动泵、油杯和压缩装置,所述车架中左右对称的固定安装有所述平衡轮总成,每个所述平衡轮总成上分别固定安装有所述增力油缸,每个所述增力油缸分别与所述制动泵之间连接有一号油管,每个所述制动泵分别与所述油杯之间连接有二号油管,每个所述制动泵上分别固定安装有所述压缩装置,门架前移时,压缩装置释放,制动泵吸油,液压油通过油管从增力油缸流入制动泵,平衡轮高度上移,增加驱动轮对地面的压力,门架后移时,压缩装置压缩,制动泵压油,液压油通过油管从泵体流入增力油缸,平衡轮下移,减少驱动轮对地面的压力,由于压缩装置的弹性,该平衡轮系统还起到减震的作用。通过由平衡轮总成、增力油缸、制动泵、油杯、压缩装置组成的自动调节式平衡轮减震系统,使得堆高车能够在不同载荷条件下稳定行驶,保证了堆高车的平顺性和通过性。
8、作为优选,所述plc中央控制器集成安装在电控板上,所述电控板上安装各种通信系统的工控机、交换机、dc电源、报警音响、wifi发射接收器,所述车架外侧安装安装有覆盖件,所述覆盖件安装有车载触摸屏、报警指示灯、手动切换按钮、复位按钮、启动按钮、手柄插头、急停按钮,所述车载触摸屏通过所述无线通信模块与所述plc中央控制器连接,这样的安装方式便于硬件的安装,又提高了系统控制的运算速度、稳定性和抗干扰能力,也节省了车架上有限的安装空间。
9、作为优选,所述手持式遥控操作盒通过所述无线通信模块与所述plc中央控制器连接,所述手持式遥控操作盒的设置,提供了便捷的人机互动,使得agv托盘搬运车的操作者能实时掌控全局,如进行站点设定、路径规划等。
10、作为优选,所述引导机构包括激光导航器、磁导航器和视觉导航器,所述激光导航器或是所述磁导航器设置在门架底部,所述车架的顶部固定设有所述视觉导航器或是所述激光导航器,所述视觉导航器设置在两个无线称重货叉之间,所述激光导航器、所述磁导航器和所述视觉导航器分别与所述plc中央控制器连接,视觉导航器、激光导航器、磁导航器具有导引精度高、可控性好的特性,能保证agv托盘搬运车在合理位置进叉,也能保证多站点最合理路径规划和自由调配。
11、作为优选,所述避障机构中包括分别与所述plc中央控制器连接的激光传感器、机械碰撞感应传感器和光电开关,所述车架的左右后侧分别固定设有所述激光传感器,所述机械碰撞感应传感器固定安装在无线称重货叉的外侧和所述车架的底部,所述光电开关固定安装在无线称重货叉上,激光传感器、机械碰撞感应传感器、光电开关的设置,组成了全方位避障防护网,有效地规避了运行过程中的各种潜在危险。
12、作为优选,所述动力机构中包括锂电池、电量表、语音提示模块和锂电池管理系统bms,所述车架中固定安装有锂电池,所述锂电池上连接有电量表和语音提示模块,所述锂电池管理系统bms用于管理所述锂电池,所述锂电池、所述电量表、所述语音提示模块、所述锂电池管理系统bms均与所述plc中央控制器连接,从而能直观获取锂电池电量信息,更极大的方便协调单机的使用时间,以及实时监控锂电池电量、电流、电压、温度等数据,有效地保护了锂电池,大大提高了锂电池的使用效率。
13、作为优选,所述车架的左侧面安装有自动充电装置,所述自动充电装置用于给所述锂电池进行自动充电,所述自动充电装置与所述plc中央控制器连接,所述自动充电装置中包括充电刷板和外置自动充电器,所述车架上安装有所述充电刷板,所述充电刷板外接电源,所述充电刷板与所述外置自动充电器相连接,所述外置自动充电器分别与所述plc中央控制器和所述锂电池连接,当agv托盘搬运车在运行工作中检测到锂电池电量不足时,外置自动充电装置将锂电池电量不足的信息指令传输给plc中央控制器,plc中央控制器依据该信息指令向电量表和语音提示模块发送信息,电量表将锂电池电量不足信息显示出来,语音提示模块通过语音方式提示锂电池电量不足信息并由plc中央控制器提示发出自动充电信号传递给车辆按规划路线自动行驶至外置自动充电器处进行自动感应充电,充电完成后并将充电信息传递给plc中央控制器,由plc中央控制器再继续控制车辆自动完成其它作业需求。
14、综上所述,本发明有益效果是:
15、1、本发明转向精准定位、货叉及货物精准起升、门架精准前移、自动导航、自动充电、避障、警示等功能且自动化程度高的前移式agv堆高车。该前移式agv堆高车具有机动灵活、适应性强、操作简单、自动导航、自动充放电、无人称重、全向转向以及作业空间小、自动化程度高等特点,可灵活应对各种工况场合,通过巧妙的空间布局安排,可编程式进行设置并更改优化行驶路线,使得车体占用面积小却又具备平衡重叉车和堆高车的常用功能,可以更有效、广泛地应用于各种仓库、货场、码头、工厂等场所的物流搬运和堆垛作业,给物流搬运行业提供了一种更加智能、高效的选择。
16、2、本发明具有无线称重、转向精准定位、货叉及货物精准起升、门架精准前移、自动导航、自动充电、避障、警示等功能且自动化程度高的前移式agv堆高车。该前移式agv堆高车具有机动灵活、适应性强、操作简单、自动导航、自动充放电、无人称重、全向转向以及作业空间小、自动化程度高等特点,可灵活应对各种工况场合,通过巧妙的空间布局安排,可编程式进行设置并更改优化行驶路线,使得车体占用面积小却又具备平衡重叉车和堆高车的常用功能,可以更有效、广泛地应用于各种仓库、货场、码头、工厂等场所的物流搬运和堆垛作业,给物流搬运行业提供了一种更加智能、高效的选择。
- 还没有人留言评论。精彩留言会获得点赞!