一种基于机器视觉的辅料智能识别拆分入库方法及装置与流程
所属的技术人员能够理解,本发明的各个方面可以实现为系统、方法或程序产品。因此,本发明的各个方面可以具体实现为以下形式,即:完全的硬件实施例、完全的软件实施例(包括固件、微代码等),或硬件和软件方面结合的实施例,这里可以统称为“电路”、“模块”或“系统”。通过以上的实施例的描述,本领域的技术人员易于理解,这里描述的示例实施例可以通过软件实现,也可以通过软件结合必要的硬件的方式来实现。因此,根据本公开实施例的技术方案可以以软件产品的形式体现出来,该软件产品可以存储在一个非易失性存储介质(可以是cd-rom,u盘,移动硬盘等)中或网络上,包括若干指令以使得一台计算设备(可以是个人计算机、服务器、终端装置、或者网络设备等)执行根据本公开实施例的方法。在本公开的示例性实施例中,还提供了一种计算机可读存储介质,其上存储有能够实现本说明书上述方法的程序产品。在一些可能的实施例中,本发明的各个方面还可以实现为一种程序产品的形式,其包括程序代码,当所述程序产品在终端设备上运行时,所述程序代码用于使所述终端设备执行本说明书上述“示例性方法”部分中描述的根据本发明各种示例性实施例的步骤。此外,上述附图仅是根据本发明示例性实施例的方法所包括的处理的示意性说明,而不是限制目的。易于理解,上述附图所示的处理并不表明或限制这些处理的时间顺序。另外,也易于理解,这些处理可以是例如在多个模块中同步或异步执行的。本领域技术人员在考虑说明书及实践这里公开的发明后,将容易想到本公开的其他实施例。本技术旨在涵盖本公开的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本公开的一般性原理并包括本公开未公开的本中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本公开的真正范围和精神由权利要求指出。应当理解的是,本公开并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本公开的范围仅由所附的权利要求来限。
背景技术:
1、在卷烟生产过程中,生产辅料智能仓储是现代化生产企业的技术根基。生产辅料智能仓储是通过对辅料进行分装或混装模式装箱、称重后,经入库输送系统进入配方库存放。此生产辅料智能仓储基于卷烟原材料具有的品种单一、批量入库等特点,在入库环节可以通过条形码、二维码、rfid等标识技术,实现自动分类入库的仓储方式。但是,现有的生产辅料仓储方式往往因为品种数量繁多,相同品种不同厂家,同一厂家不同批次物料、包装形式及尺寸差异性较大,而且码放无规律、辅料更换频繁等因素,要实现分类分拣只能通过人工分拣搬运手段实现,而人工分拣存在生产效率低,劳动强度大,分拣误差率高以及自动统计困难等因素。同时在生产过程中,为了满足均质化、人性化、精细化的生产要求,更加加大了人工分拣的工作量。
2、因此,需要一种或多种方法解决上述问题。
3、需要说明的是,在上述背景技术部分公开的信息仅用于加强对本公开的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、本公开的目的在于提供一种基于机器视觉的辅料智能识别拆分入库方法、装置、电子设备以及计算机可读存储介质,进而至少在一定程度上克服由于相关技术的限制和缺陷而导致的一个或者多个问题。
2、根据本公开的一个方面,提供一种基于机器视觉的辅料智能识别拆分入库方法,包括:
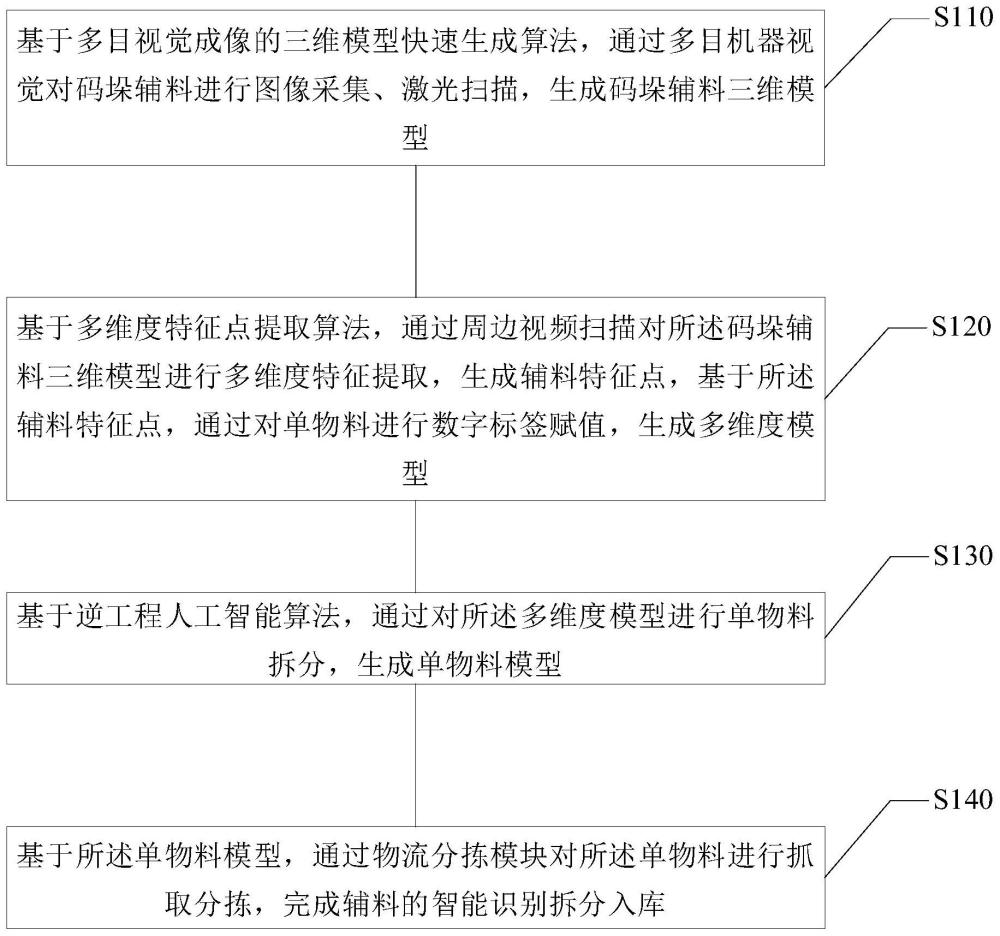
3、基于多目视觉成像的三维模型快速生成算法,通过多目机器视觉对码垛辅料进行图像采集、激光扫描,生成码垛辅料三维模型。
4、基于多维度特征点提取算法,通过周边视频扫描对所述码垛辅料三维模型进行多维度特征提取,生成辅料特征点,基于所述辅料特征点,通过对单物料进行数字标签赋值,生成多维度模型。
5、基于逆工程人工智能算法,通过对所述多维度模型进行单物料拆分,生成单物料模型。
6、基于所述单物料模型,通过物流分拣模块对所述单物料进行抓取分拣,完成辅料的智能识别拆分入库。
7、在本公开的一种示例性实施例中,基于多目视觉成像的三维模型快速生成算法,通过辅料视觉对所述码垛辅料进行图像采集,生成辅料画面信息。
8、基于所述辅料画面信息,通过三维激光扫描模块对所述码垛辅料进行建模,生成码垛机器三维模型。
9、在本公开的一种示例性实施例中,基于人工辅助引导模式,通过人工视觉对码垛辅料进行图像采集,生成训练画面信息。
10、基于所述训练画面信息,通过三维激光扫描模块对所述码垛辅料进行建模,生成码垛训练三维模型。
11、通过对所述码垛机器三维模型、所述码垛训练三维模型进行复合,生成码垛辅料三维模型。
12、在本公开的一种示例性实施例中,基于多维度特征点提取算法,通过周边视频扫描对码垛辅料立体轮廓线、码垛辅料颜色、码垛辅料标签、码垛辅料条形码、码垛辅料二维码、码垛辅料生产批号进行多维度特征提取,生成辅料特征点。
13、基于人工智能自学习辅料验证算法,通过对所述辅料特征点进行修正,生成多维度特征值。
14、基于所述多维度特征值,通过对所述码垛辅料三维模型进行单物料数字标签赋值,生成多维度模型。
15、在本公开的一种示例性实施例中,基于人工智能自学习算法,通过对所述码垛训练三维模型进行信息标定,生成训练集。
16、基于人工智能自学习算法,通过对所述训练集进行预设障碍场景识别,生成测试集。
17、在本公开的一种示例性实施例中,基于人工智能算法、逆工程算法,通过所述测试集对模型赋值算法进行开发,生成码垛物料模型自动拆分算法。
18、基于所述码垛物料模型自动拆分算法,通过对所述多维度模型进行拆分,生成单物料模型。
19、在本公开的一种示例性实施例中,基于所述单物料模型,通过对码垛辅料种类、码垛辅料生成厂商、码垛辅料生产批次进行识别,生成码垛物料信息。
20、基于预设入库任务,所述物流分拣模块通过所述码垛物料信息对预设单物料位置进行锁定,生成单物料位置信息。
21、基于所述单物料位置信息,伺服模块通过机械臂对单物料进行抓取分拣,完成码垛辅料的智能识别拆分入库。
22、在本公开的一个方面,提供一种基于机器视觉的辅料智能识别拆分入库装置,包括:
23、图像采集模块,用于通过多目机器视觉对码垛辅料进行图像采集,生成码垛辅料三维模型。
24、特征提取模块,用于通过周边视频扫描对所述码垛辅料三维模型进行多维度特征赋值,生成多维度模型。
25、物料拆分模块,用于通过对所述多维度模型进行单物料拆分,生成单物料模型。
26、抓取分拣模块,用于对单物料进行抓取分拣,完成辅料的智能识别拆分入库。
27、在本公开的一个方面,提供一种电子设备,包括:
28、处理器;以及
29、存储器,所述存储器上存储有计算机可读指令,所述计算机可读指令被所述处理器执行时实现根据上述任意一项所述的方法。
30、在本公开的一个方面,提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现根据上述任意一项所述的方法。
31、本公开的示例性实施例中的一种基于机器视觉的辅料智能识别拆分入库方法及装置。其中,该方法包括:基于多目视觉成像的三维模型快速生成算法,通过多目机器视觉对码垛辅料进行图像采集、激光扫描,生成码垛辅料三维模型;基于多维度特征点提取算法,通过周边视频扫描对所述码垛辅料三维模型进行多维度特征提取,生成辅料特征点,基于所述辅料特征点,通过对单物料进行数字标签赋值,生成多维度模型;基于逆工程人工智能算法,通过对所述多维度模型进行单物料拆分,生成单物料模型;基于所述单物料模型,通过物流分拣模块对所述单物料进行抓取分拣,完成辅料的智能识别拆分入库。一方面,本公开通过对码放辅料的精准识别和辨认,实现码放辅料的单体拆分解析,另一方面,本公开基于对辅料的单体拆分解析,通过物流分拣模块完成辅料的精准抓取分拣和智能识别入库。
32、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
- 还没有人留言评论。精彩留言会获得点赞!