基于CCD线性传感器跟踪连续线和间断线的方法及装置与流程
本发明涉及印刷、纺织等行业中的纠偏控制领域,尤其涉及一种基于ccd(charge-coupled device)线性传感器的连续线和间断线的跟踪方法及装置。
背景技术:
1、在印刷、纺织等行业中生产出的纸、纺织品等产品通常以卷材的形式进行生产及加工,在生产及加工过程中难免会因为机器的震动、卷材间的摩擦等因素而产生一定的印刷偏移,从而造成卷材的浪费或机器停止工作。因此需要在卷材的生产及加工过程中进行纠偏。
2、传统的纠偏跟踪方法是通过安装在卷材边缘的对射式传感器,跟踪卷材的边缘,从而对卷材进行两端对射式的纠偏。这种方法仅能保证对卷材的横向位置的两端整齐度进行纠偏。然而对于卷材中的印刷材料而言,需要对印刷材料上的图案或者印刷线进行纠偏,甚至是一些间断的图案或者间断的印刷线。则需要跟踪位于卷材上的图案边缘或者印刷线,因此传统的纠偏跟踪方法无法跟踪位于卷材上的图案边缘或者印刷线,从而不能达到对位于卷材上的线或者图案进行纠偏的目的。
技术实现思路
1、本发明目的一是提供一种基于ccd线性传感器跟踪连续线和间断线的方法,具有精确度更高、普适性更好的跟踪卷材上的待跟踪线的特点。
2、本发明的上述发明目的一是通过以下技术方案得以实现的:
3、一种基于ccd线性传感器跟踪连续线和间断线的方法,包括:
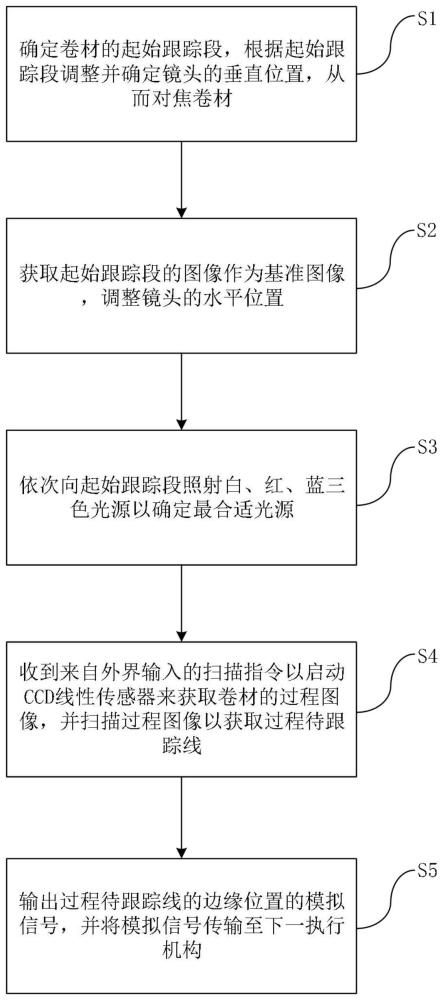
4、确定卷材的起始跟踪段,根据所述起始跟踪段调整并确定镜头的垂直位置,从而对焦卷材;获取所述起始跟踪段的图像作为基准图像,其中,卷材上含有卷材待跟踪线,向卷材发射光点,调整镜头的水平位置,直至所述光点与所述卷材待跟踪线重合,从而确定镜头的水平位置,且所述卷材待跟踪线刚好处于ccd线性传感器的视野中心位置;
5、接收到来自外界输入的扫描指令以启动ccd线性传感器来获取卷材的过程图像,并扫描所述过程图像以获取过程待跟踪线;所述扫描指令包括扫描模式指令和扫描方向指令,所述扫描模式包括跟边模式和间断线模式,所述跟边模式用于在所述卷材跟踪线为连续线时跟踪扫描,所述间断线模式用于在所述卷材跟踪线为间断线时跟踪扫描,所述扫描方向包括从左往右扫描和从右往左扫描;
6、输出所述过程待跟踪线的边缘位置的模拟信号,并将所述模拟信号传输至下一执行机构,以使下一执行机构计算偏移量,根据所述过程待跟踪线的偏移量进行纠偏,令所述过程待跟踪线始终保持在所述视野中心位置。
7、通过采用上述技术方案,要实现对卷材上的待跟踪线的自动化跟踪扫描,并输出待跟踪线的位置,首先需要调整镜头的垂直位置和水平位置,对焦卷材,并使得光点与卷材上的待跟踪线重合,这使得ccd线性传感器能够对焦并使得卷材待跟踪线刚好处于ccd线性传感器视野中心位置,从而确保后续跟踪过程待跟踪线的清晰度和准确性。其次可选的扫描模式和扫描方向使得本跟踪方法能够适应不同类型的待跟踪线,以及锁定ccd线性传感器视野中的待跟踪线,提高了本跟踪方法的适用性和灵活性。最后通过将待跟踪线的边缘位置传输给下一执行机构,并计算偏移量进行纠偏,可以使待跟踪线始终保持在ccd线性传感器视野中心位置,这有助于提高跟踪待跟踪线的准确性和稳定性,避免了卷材出现偏移情况的发生。综上,通过自动化的方式对卷材进行跟踪扫描,不需要人工干预和操作。同时,除了能对卷材上的线进行扫描,还能对卷材上的图案的边缘进行扫描,从而通过对位于卷材上的线或者图案进行纠偏的目的。这将提高生产效率、减少人力成本,同时对卷材在生产和加工过程中进行质量把控。
8、本发明在一较佳示例中可以进一步配置为,所述确定卷材的起始跟踪段,根据所述起始跟踪段调整并确定镜头的垂直位置,从而对焦卷材,包括:
9、将两条相交的激光束照射到卷材上;
10、调整镜头进行上下移动,使得两条激光束照射到卷材上的两个光点重合,从而对焦卷材,并确定镜头的垂直位置。
11、通过采用上述技术方法,首先照射两条相交的激光束到卷材上,并调整镜头的垂直位置,使得两个光点重合,从而实现对焦。这样可以确保镜头与卷材之间的距离和焦距调整到最佳状态,提高获取到的图像的清晰度和准确性。其次利用激光束进行对焦,可以实现自动化的镜头调焦过程。本跟踪方法可以根据起始跟踪段的位置信息,自动调整镜头的垂直位置,使得激光束的光点重合。这样可以减少人工操作和干预,提高生产效率和准确性。最后通过采用激光束对焦的方式,可以实现快速响应和调整。相比传统的手动对焦方式,激光束对焦可以更快速地完成调整过程,提高生产效率和响应速度。同时通过采用激光束对焦的方式也可以减少人为因素对对焦结果的影响,降低误差发生的可能性。通过自动化的调焦过程,可以提高对焦的准确性和一致性,减少因人为操作而引入的误差。
12、本发明在一较佳示例中可以进一步配置为,所述接收到来自外界输入的扫描指令以启动ccd线性传感器来获取卷材的过程图像,并扫描所述过程图像以获取过程待跟踪线;所述扫描指令包括扫描模式指令和扫描方向指令,所述扫描模式包括跟边模式和间断线模式,所述跟边模式用于在所述卷材跟踪线为连续线时跟踪扫描,所述间断线模式用于在所述卷材跟踪线为间断线时跟踪扫描,所述扫描方向包括从左往右扫描和从右往左扫描,包括:
13、接收来自外界输入的扫描模式指令;
14、判断接收到的扫描模式指令是跟边模式指令还是间断线模式指令,若接收到跟边模式指令,则所述卷材待跟踪线为连续线,若接收到间断线模式指令,则所述卷材待跟踪线为间断线。
15、通过采用上述技术方法,首先接收外界输入的扫描模式指令,根据实际情况选择跟边模式或者间断线模式,这样可以灵活适应卷材上的不同待跟踪线的特性,无论是连续线还是间断线,都能进行有效的跟踪扫描。其次采用ccd线性传感器对卷材上的待跟踪线进行跟踪扫描可以减少人为因素对结果的影响,降低误差发生的可能性。
16、本发明在一较佳示例中可以进一步配置为,所述判断接收到的扫描模式指令后,确定ccd线性传感器的扫描方向,所述确定ccd线性传感器的扫描方向,包括:
17、接收来自外界输入的扫描方向指令;
18、判断接收到的扫描方向指令是从左往右还是从右往左,若接收到从左往右的扫描方向指令时,则启动ccd线性传感器从左往右进行扫描所述卷材待跟踪线,若接收到从右往左的扫描方向指令时,则启动ccd线性传感器从右往左进行扫描所述卷材待跟踪线。
19、通过采用上述技术方法,本跟踪方法能够根据外界输入的扫描方向指令灵活选择ccd线性传感器的扫描方向,在出现ccd线性传感器的视野中除待跟踪线以外存在其它干扰的线的情况下,因此需要通过设置ccd线性传感器的扫描方向,用于锁定待跟踪线,满足不同应用场景的扫描需求,提高系统的适用性。此外,根据接收到的扫描方向指令,能够准确地启动ccd线性传感器进行扫描,避免了人为操作可能引入的误差和漏检问题。这样可以提高扫描的准确性和可靠性,保证对卷材上的待跟踪线的进行精准跟踪扫描。
20、本发明在一较佳示例中可以进一步配置为,所述接收到来自外界输入的扫描指令以启动ccd线性传感器来获取卷材的过程图像,并扫描所述过程图像以获取过程待跟踪线,包括:
21、读取ccd线性传感器视野中的所有像素点的灰度值;
22、计算出灰度值最大差值的相邻的两个像素点,以确定所述过程待跟踪线的位置;
23、选取ccd线性传感器视野中所述过程待跟踪线的位置的像素点,并存储所述像素点的位置数。
24、通过采用上述技术方法,读取ccd线性传感器视野中所有像素点的灰度值,可以精确地定位过程待跟踪线的位置,提高了定位的精准性和效率。此外通过计算出灰度值最大差值的相邻像素点,可以确定过程待跟踪线的位置,这种方法能够有效地识别出过程待跟踪线的边缘,提高了跟踪待跟踪线的精准性。
25、本发明在一较佳示例中可以进一步配置为,所述方法还包括:
26、根据所述像素点的位置数,计算所述过程待跟踪线的位置;所述计算所述过程待跟踪线的位置的计算公式为:
27、
28、其中n为灰度值最大差值像素点位置数,n为视野中总像素点个数,l为灰度值最大差值像素点位置长度,l为视野总长度。
29、通过采用上述技术方法,采用计算公式来确定过程待跟踪线的位置,可以根据具体需求进行参数的调整。例如,可以根据不同的生产线、材料特性或环境条件等因素,灵活地调整计算公式中的参数,以获得最合适的跟踪效果。这种灵活性和可调性使得本跟踪方法能够适应不同场景和需求的变化。此外,考虑灰度值最大差值像素点位置数、视野中总像素点个数、灰度值最大差值像素点位置长度以及视野总长度等因素,本计算公式能够更准确地确定过程待跟踪线的位置,这样可以提高跟踪待跟踪线的精度和稳定性,减少误差和偏差的影响,确保待跟踪线与实际过程的吻合度。
30、本发明在一较佳示例中可以进一步配置为,在所述获取所述起始跟踪段的图像作为基准图像之后,依次向所述起始跟踪段照射白、红、蓝三色光源以确定最合适光源。
31、通过采用上述技术方法,通过依次照射白、红、蓝三色光源,不同颜色光源下起始跟踪段的图像会有相应的变化情况。根据图像的亮度、对比度等特征,可以判断哪种光源能够提供最清晰、最明亮、最准确的图像信息。通过确定最合适的光源,可以提高后续图像处理和分析的质量和准确性。此外,通过确定最合适的光源,可以为后续的图像处理算法提供更好的输入数据。不同光源下的图像变化可以帮助优化图像增强、边缘检测、目标识别等算法的参教设置和调整。这将有助于提高图像处理算法的性能,提升对起始跟踪段中目标的准确识别和跟踪能力。
32、本发明在一较佳示例中可以进一步配置为,所述依次向所述起始跟踪段照射白、红、蓝三色光源以确定最合适光源,包括:
33、向所述起始跟踪段轮流照射白、红、蓝三种颜色的光,所述三种颜色的光的光照强度分为10个等级,则共进行30次照射;
34、依次获取所述起始跟踪段对应不同光照强度等级的测试图像,并读取所述测试图像中的所有像素点的灰度值,以计算所述测试图像的对比度;
35、选取并保存最大对比度所对应的光源和光照强度,为最合适光照组合。
36、通过采用上述技术方法,首先确保在不同光照条件下,能够提供最合适的图像质量和对比度,从而提高后续图像处理和分析的质量和准确性。此外通过确定最合适光照组合,可以为后续的图像处理算法提供更好的输入数据。最合适光照组合能够帮助优化图像增强、边缘检测等算法的参数设置和调整。这将有助于提高图像处理算法的性能,提升对起始跟踪段上待跟踪线的准确识别和跟踪能力。进一步提升本跟踪方法的性能和可靠性,满足工业生产中对精确、高效跟踪的需求。
37、本发明在一较佳示例中可以进一步配置为,所述输出所述过程待跟踪线的边缘位置的模拟信号,并将所述模拟信号传输至下一执行机构,以使下一执行机构计算偏移量,根据所述过程待跟踪线的偏移量进行纠偏,令所述过程待跟踪线始终保持在所述视野中心位置,包括:
38、当所述过程待跟踪线为间断线时,若ccd线性传感器跟踪扫描到线,则输出正常的模拟信号;
39、若ccd线性传感器跟踪扫描不到线,则输出一个特定的信号,所述特定的信号用于表示间断线的间断部分。
40、通过采用上述技术方法,当过程待跟踪线为间断线时,如果ccd线性传感器无法扫描到线,则会输出特定的信号来表示间断线的间断部分。这样可以明确指示卷材上存在间断线的情况,便于后续处理和判断。同时,通过对间断部分的处理,可以更好地保持对待跟踪线跟踪的连续性,提高跟踪的连续性和鲁棒性。通过输出模拟信号和处理间断线,系统具备了一定的自适应性能。本跟踪方法可以根据实际情况对待跟踪线进行调整和处理,适应不同线的形状、间断情况等因素的影响。这将增强本跟踪方法在复杂环境下的适应能力和鲁棒性,提高跟踪的稳定性和可靠性。
41、本发明目的二是提供一种基于ccd线性传感器跟踪连续线和间断线的装置,具有精确度更高、普适性更好的跟踪卷材上的待跟踪线的特点。
42、本发明的上述发明目的二是通过以下技术方案得以实现的:
43、一种基于ccd线性传感器跟踪连续线和间断线的装置,包括:
44、对焦模块,用于确定卷材的起始跟踪段,根据所述起始跟踪段调整并确定镜头的垂直位置,从而对焦卷材;
45、水平位置调整模块,用于获取所述起始跟踪段的图像作为基准图像,从而确定镜头的水平位置;
46、扫描模块,用于接收到来自外界输入的扫描指令以启动ccd线性传感器来获取卷材的过程图像,并扫描所述过程图像以获取过程待跟踪线;
47、模拟信号输出模块,用于输出所述过程待跟踪线的边缘位置的模拟信号,并将所述模拟信号传输至下一执行机构,以使下一执行机构计算偏移量,根据所述过程待跟踪线的偏移量进行纠偏,令所述过程待跟踪线始终保持在所述视野中心位置。
48、综上所述,本发明包括以下至少一种有益技术效果:
49、1.通过在初始化调试阶段,使用激光束进行对焦和对中,使得在调试阶段就确保了待跟踪线位于ccd线性传感器视野中心的位置,减少人为因素对对焦结果的影响,降低误差发生的可能性。因此本方法避免了在初始化调试阶段的调试效果不良,从而导致卷材的偏移,不能进行精准的纠偏操作。本方法具有更精准地跟踪卷材上的待跟踪线,从而能够进行精准纠偏的效果;
50、2.可选的扫描模式和扫描方向使得本跟踪方法能够适应不同类型的待跟踪线,无论是连续线还是间断线,都能进行有效的跟踪扫描。以及在出现ccd线性传感器的视野中除待跟踪线以外存在其它干扰的线的情况下,通过设置ccd线性传感器的扫描方向,锁定ccd线性传感器视野中的待跟踪线。因此,本跟踪方法还具有一定的适用性和灵活性;
51、3.本跟踪方法通过自动化的方式对卷材进行跟踪扫描,不需要人工干预和操作。这将大大提高生产效率、减少人力成本,同时对卷材在生产和加工过程中进行实时纠偏,从而达到对卷材的质量把控的效果。
- 还没有人留言评论。精彩留言会获得点赞!