一种具有寻边定位纠偏功能的取放板装置及方法与流程
本发明涉及电路板生产,尤其公开了一种具有寻边定位纠偏功能的取放板装置及方法。
背景技术:
1、在电子行业的电路板制造过程中,往往需要将输送带流片的电路板转运至特殊治具中,由于电路板在输送带上流动的过程中难免会产生相对原始设定位置的偏转,那么在取放电路板时就需要将偏移的电路板校正。现有技术中,采取的常用方式是在输送带的两侧分别设置拨动杆,当具有角度偏移的电路板(即未对中的电路板)放置到输送带上后,通过拨动电路板的侧方,以校正电路板的位置,如申请号为2022212879626的中国发明专利《一种非接触式磁性定位调整输送机构》。但是,采用该种方式,在流片的过程中增加了一个校正的节拍,会导致流片效率降低,并且在拨正过程中会增加电路板与输送带之间的摩擦,容易刮花电路板,增加不良品率。
技术实现思路
1、为了克服现有技术中存在的缺点和不足,本发明的目的在于提供一种具有寻边定位纠偏功能的取放板装置及方法,利用自动寻边机构对传输机构上停留的电路板进行定位,以配合手臂机构调整取板角度和位置后直接取放板,无需在传输机构上设置对中调节机构将板拨正,简化了生产步骤、且有效避免电路板与输送带之间摩擦而刮花电路板,降低产品不良率。
2、为实现上述目的,本发明的一种具有寻边定位纠偏功能的取放板装置,包括:
3、传输机构,用于传输电路板至定点位置;
4、自动寻边机构,用于识别定点位置上停留的电路板的实际位置;自动寻边机构包括x轴驱动模块、x轴传感器、y轴驱动模块及y轴传感器,于驱动x轴传感器沿x轴往返移动,y轴驱动模块用于驱动y轴传感器沿y轴往返移动,x轴传感器用于感应识别传输机构上停放的电路板的第一侧边的位置,y轴传感器用于识别传输机构上停放的电路板的第二侧边的位置,第一侧边与第二侧边为电路板相邻的两个边;
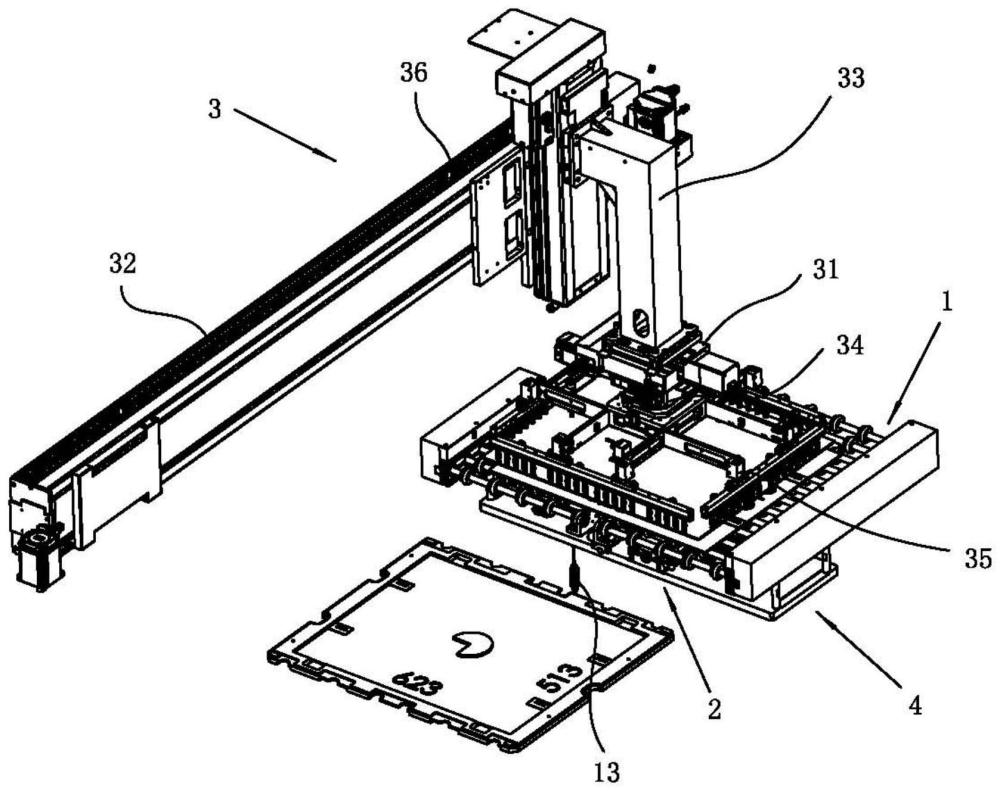
5、手臂机构,用于拾起传输机构上停留的电路板、纠正该电路板的位姿及将该电路板转运放置到指定载具上,手臂机构包括x轴活动模组、y轴活动模组、z轴活动模组、r轴活动模组及拾取组件,x轴活动模组用于驱动拾取组件沿x轴往复移动,y轴活动模组用于驱动拾取组件沿y轴往复移动,z轴活动模组用于驱动拾取组件沿z轴往复移动,r轴活动模组用于驱动拾取组件转动,拾取组件用于拾取电路板。
6、具体地,还包括支撑机构,传输机构与自动寻边机构均安装于支撑机构,支撑机构包括底板、两组第一支撑柱、两组架梁、两组第二支撑柱及两个挡板,
7、两组第一支撑柱分别安装于底板同一面的两端,两组架梁平行设置且一组架梁安装于一组第一支撑柱上;
8、两组第二支撑柱均安装于底板,两个挡板与两组第二支撑柱一一对应安装,两个挡板分别用于遮挡x轴驱动模块与y轴驱动模块。
9、具体地,传输机构包括驱动组件以及多个滚轮组件,滚轮组件包括滚轴、多个滚轮及多个锁止件,多个滚轮等距套设在滚轴上,滚轴的两端分别经由轴承转动安装于两组架梁上,多个锁止件分别用于锁紧多个滚轮以使多个滚轮固定于滚轴上;
10、驱动组件包括电机、轮轴、多个主动轮及多个从动轮,电机用于驱动轮轴转动,轮轴经由轴承转动安装于一个架梁上并与架梁平行设置,多个主动轮套设于轮轴上并随轮轴转动,多个主动轮与多个从动轮一一对应啮合,多个从动轮与多个滚轴一一对应装配。
11、具体地,传输机构还包括板件到位监测装置,板件到位监测装置设置于传输机构上板件流传方向的末端,板件到位监测装置用于监测传输机构所传输的电路板是否到位,板件到位监测装置与自动寻边机构信号连接。
12、具体地,传输机构还包括两个传输组件,两个传输组件位于滚轮组件的传输方向的末端,两个传输组件之间设有检测间隙,y轴传感器用于经检测间隙后识别电路板的第二侧边。
13、具体地,手臂机构还包括多个光电开关,多个光电开关分别用于检测x轴活动模组、y轴活动模组、z轴活动模组及r轴活动模组是否到位/复位。
14、具体地,拾取组件包括安装架及多个吸嘴,安装架连接于r轴活动模组并随r轴活动模组转动,安装架具有若干个中空的安装件,多个吸嘴分别设置于各安装件;安装架上设置有外接接口以及若干个连通吸盘抽真空用的真空接口,若干个真空接口与若干个安装件一一对应连通,若干个真空进口经由外接接口外接气源。
15、具体地,以垂直于传输机构传输方向的方向为第一基准线,以平行于传输机构传输方向的方向为第二基准线;x轴传感器的数量至少为两个,两个x轴传感器的连线与第一基准线平行,两个x轴传感器分别用于识别电路板第一侧边所经过的两个点的位置;
16、y轴传感器的数量至少为一个,y轴传感器用于识别电路板第二侧边所经过的一个点的位置。
17、一种具有寻边定位纠偏功能的取放板方法,包括:
18、s01、传输机构将电路板传输至定点位置停放;
19、s02、自动寻边机构对该电路板的边缘进行位置识别,并将识别到的信息反馈至手臂机构;
20、s03、手臂机构根据自动寻边机构所识别到的信息调整拾取组件在x轴和y轴的位置以及旋转角度,再沿z轴下降拾取该电路板;
21、s04、手臂机构拾取电路板后,将电路板向上升起,通过转动r轴活动模组纠正该电路板的角度,并调整电路板在x轴和y轴上的位置,以使电路板符合预设的指定位置与姿态,最终将该电路板放至指定的载具中;
22、所述步骤s02包括:
23、s201、x轴驱动模块驱动两个x轴传感器同时移动,直至两个x轴传感器同时或先后不被电路板遮挡,分别记录两个x轴传感器不被电路板遮挡时的第一位置信息;
24、s202、y轴驱动模块驱动y轴传感器移动靠近电路板的第二侧边,直至y轴传感器不被电路板遮挡时记录y轴传感器的第二位置信息;
25、s203、根据两个第一位置信息计算得到电路板第一侧边的实际位置以及偏转角度,根据第二位置信息获取电路板第二侧边的实际位置;
26、s204、把电路板第一侧边的实际位置以及偏转角度、第二侧边的实际位置分别传输至手臂机构。
27、具体地,所述步骤s01包括:
28、s101、传输机构的驱动组件驱动多个滚轮组件转动,人工或机械手将板件放置于多个滚轮组件上流传;
29、s102、当板件流传至多个滚轮组件靠近手臂机构的位置时,板件到位监测装置感应到板件已到达定点位置,板件到位监测装置将板件到位信息反馈至驱动组件;
30、s103、驱动组件根据板件到位信息停止驱动多个滚轮组件转动,使得板件停留在定点位置上;
31、所述步骤s04包括:
32、s401、手臂机构拾取板件后,z轴活动模组上升,z轴上的光电开关识别到z轴活动模组已复位,z轴活动模组停止活动;
33、s402、z轴活动模组已复位后,r轴活动模组驱动拾取组件转动,r轴上的光电开关识别到r轴活动模组已复位,r轴活动模组停止转动;
34、s403、r轴活动模组复位后,x轴活动模组活动,x轴上的光电开关识别到x轴活动模组已复位,x轴活动模组停止活动;
35、s404、x轴活动模组复位后,y轴活动模组活动将拾取组件带到指定载具的位置,y轴上的光电开关识别到y轴活动模组已经到达指定载具上方,y轴活动模组停止活动;
36、s405、y轴活动模组到位后,z轴活动模组下降,z轴上的光电开关识别到z轴活动模组已下降到位,拾取组件的吸嘴通气,将板件放置在指定载具中;
37、s406、板件被放置到指定载具后,z轴活动模组上升,z轴上的光电开关识别到z轴活动模组已复位,z轴活动模组停止活动,各轴活动模组均不再活动,等待下一次拾取转运板件。
38、本发明的有益效果:本发明所述的一种具有寻边定位纠偏功能的取放板装置,包括传输机构、自动寻边机构及手臂机构,传输机构用于将电路板传输至定点位置,自动寻边机构用于识别定点位置上停留的电路板的实际位置及摆放角度,手臂机构用于拾起传输机构上停留的电路板、纠正该电路板的位姿及将该电路板转运放置到指定载具上。一种具有寻边定位纠偏功能的取放板方法包括:传输机构将电路板传输至定点位置停放;自动寻边机构对该电路板的边缘进行位置识别,并将识别到的信息反馈至手臂机构;手臂机构根据自动寻边机构所识别到的信息调整拾取组件在x轴和y轴的位置以及旋转角度,再沿z轴下降拾取该电路板;手臂机构拾取电路板后,将电路板向上升起,通过转动旋转平台纠正该电路板的角度,并调整电路板在x轴和y轴上的位置,以使电路板符合预设的指定位置与姿态,最终将该电路板放至指定的载具中。该具有寻边定位纠偏功能的取放板装置及方法,实现在取放板的动作过程中校正该电路板的位置及姿态,无需另外设置对中调整组件将电路板拨正,简化了电路板传输过程的步骤,并有效避免了电路板与传输机构之间发生摩擦,减少刮花电路板的可能,从而降低产品不良率。
- 还没有人留言评论。精彩留言会获得点赞!