一种拾取装置的制作方法
本发明属于机械设计,涉及吊装机械设计,具体涉及一种可同时拾取工件与废料的拾取装置。
背景技术:
1、近年来,随着搬运机器人技术的发展,自动上下料在各种自动化产线得到广泛应用。
2、在实际生产中,受模具结构及设备结构影响,部分冲压件冲裁后的废料为整体料边,为实现工件自动化冲压生产,提高生产效率,需同时将工件与废料同时取出。实际生产中通过人工将工件与废料先后从模具中取出,生产方式劳动强度大,效率低。
技术实现思路
1、本发明公开了一种拾取装置。本发明目的是提供一种在自动化冲压生产线中可根据工件外形尺寸调整拾取单元的位置与数量,同时拾取工件与废料的拾取装置。
2、本发明通过以下技术方案实现:
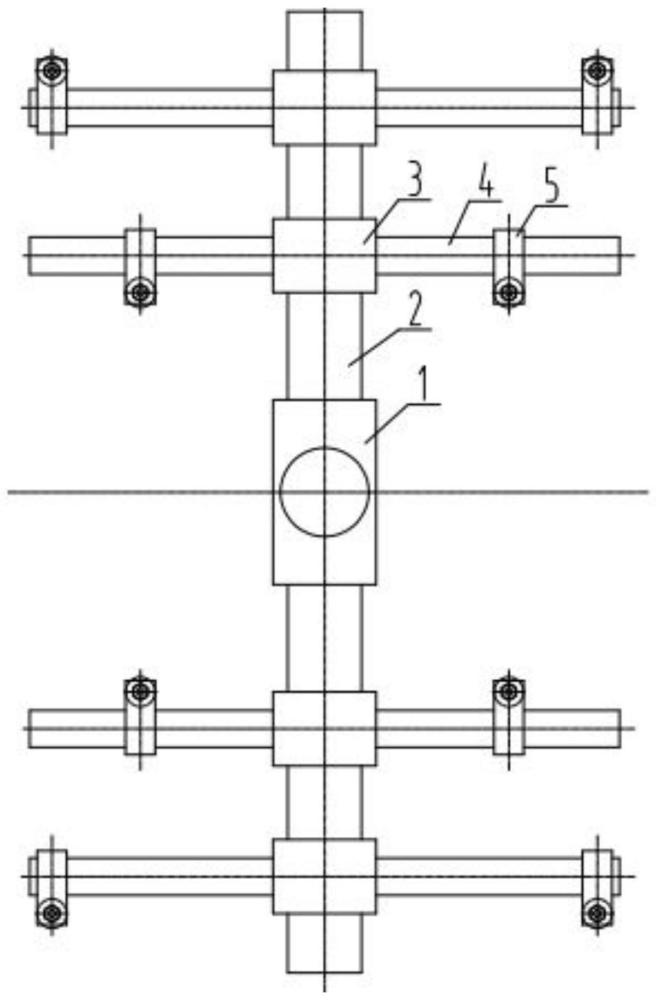
3、一种拾取装置,为电磁吸附或真空吸附吊装装置,其特征在于:由连接板、吊装主梁、主梁连接滑块、横梁、横梁连接滑块、拾取单元组成;连接板上端与移动机械臂连接、下端与吊装主梁中心固定连接;吊装主梁纵向布置,吊装主梁设置多组通过主梁连接滑块可移动联接、横向布置的横梁,各横梁通过横梁连接滑块安装设置电磁吸附或真空吸附的拾取单元。
4、进一步所述主梁连接滑块上部设置与吊装主梁匹配的纵向布置的滑孔,滑孔与吊装主梁滑动配合并可通过螺栓与吊装主梁固定;主梁连接滑块下部两侧与横梁联接固定。
5、进一步所述横梁连接滑块设置与横梁匹配的滑孔,滑孔与横梁滑动配合并可通过螺栓与横梁固定。
6、进一步所述连接板上端设置有与移动机械臂联接的吊环。
7、本发明所述横梁上设置可拆卸的沿吊装主梁两侧对称布置的一组或多组拾取单元,每组包括沿吊装主梁两侧对称布置的两个拾取单元。
8、本发明每组拾取单元分别与控制器控制联接;各组拾取单元可以独立或同步控制,各组拾取单元可以实现分别或同步的拾取作业。
9、所述拾取单元是用于吊装废料或工件的废料拾取单元或/和工件拾取单元。
10、本发明有益性:本发明通过调整主梁连接滑块和横梁连接滑块的位置来调整拾取单元的位置,保证拾取装置准确拾取工件和废料;本发明通过设置多组可拆卸的横梁和并可分别控制拾取单元,适应不同形状、大小及重量的工件。
技术特征:
1.一种拾取装置,为电磁吸附或真空吸附吊装装置,其特征在于:由连接板、吊装主梁、主梁连接滑块、横梁、横梁连接滑块、拾取单元组成;连接板上端与移动机械臂连接、下端与吊装主梁中心固定连接;吊装主梁纵向布置,吊装主梁设置多组通过主梁连接滑块可移动联接、横向布置的横梁,各横梁通过横梁连接滑块安装设置电磁吸附或真空吸附的拾取单元。
2.根据权利要求1所述拾取装置,其特征在于:所述主梁连接滑块上部设置与吊装主梁匹配的纵向布置的滑孔,滑孔与吊装主梁滑动配合并可通过螺栓与吊装主梁固定;主梁连接滑块下部两侧与横梁联接固定。
3.根据权利要求1所述拾取装置,其特征在于:所述横梁连接滑块设置与横梁匹配的滑孔,滑孔与横梁滑动配合并可通过螺栓与横梁固定。
4.根据权利要求1所述拾取装置,其特征在于:所述连接板上端设置有与移动机械臂联接的吊环。
5.根据权利要求1至4任一项所述拾取装置,其特征在于:所述横梁上设置可拆卸的沿吊装主梁两侧对称布置的一组或多组拾取单元,每组包括沿吊装主梁两侧对称布置的两个拾取单元。
6.根据权利要求5所述拾取装置,其特征在于:所述拾取单元是用于吊装废料或工件的废料拾取单元或/和工件拾取单元。
技术总结
本发明公开了一种拾取装置,由连接板、吊装主梁、主梁连接滑块、横梁、横梁连接滑块、拾取单元组成;连接板上端与移动机械臂连接、下端与吊装主梁中心固定连接;吊装主梁纵向布置,吊装主梁设置多组通过主梁连接滑块可移动联接、横向布置的横梁,各横梁通过横梁连接滑块安装设置电磁吸附或真空吸附的拾取单元;各拾取单元可拆卸并沿吊装主梁两侧对称布置一组或多组,各组拾取单元可以独立或同步控制以实现分别或同步的拾取作业。本发明通过调整主梁连接滑块和横梁连接滑块的位置来调整拾取单元的位置,保证拾取装置准确拾取工件和废料;本发明通过设置多组可拆卸的横梁和并可分别控制拾取单元,适应不同形状、大小及重量的工件。
技术研发人员:朱进华,程洪建,方宝,张庆良,邓兴伟,罗福贵,李伟,张国强
受保护的技术使用者:中车眉山车辆有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!