粉末组分可控铺粉集成装置及工作方法与流程
1.本发明涉及增材制造领域,具体地,涉及粉末组分可控铺粉集成装置及工作方法;尤其涉及实现粉床成型区域粉末组分可控的增材制造供铺粉集成装置及方法。
背景技术:
2.目前,在传统的增材制造工艺中,只有一种均质的粉末床。随着工件的特殊性能需求不断扩大,诸如梯度材料的进一步研究,迫切需要能实现工件不同部位的不同材料配比的粉末床。
3.专利文献cn111922339a涉及一种粉末床3d打印方法及设备,激光束扫描支撑区域时,第一焦点平面位于在先固化物层与在后粉末层的接合面。因此,激光束的上光锥用于加热在后粉末层,而下光锥则用于加热在先固化物层,故在粉末熔化产生的新生熔体的同时,在先固化物层也将会再次熔融,从而确保在后固化物层与在先固化物层实现紧密结合。而激光束在扫描悬空区域时,第二焦点平面相对于第一焦点平面上移第一厚度的距离,故新生熔体的上表面与第二焦点平面重合。
4.专利文献cn112092364a涉及一种粉末床3d打印设备及其铺粉装置,粉盒内的粉末先经出粉口在传送带的表面进行初级铺设,得到预铺粉末层。随着传送带继续循环,其表面的粉末将与之脱离。且随着支撑架沿第一方向移动,从传送带脱离的粉末将依次转移至铺粉平台的表面。
5.上述现有专利未能解决工件不同部位的不同材料配比的问题。
技术实现要素:
6.针对现有技术中的缺陷,本发明的目的是提供一种粉末组分可控铺粉集成装置及工作方法。
7.根据本发明提供的一种粉末组分可控铺粉集成装置,包括:直线运动模块、滑动连接块、导向杆、智能落粉机构组件以及中央控制器;
8.所述滑动连接块安装在直线运动模块上并允许沿直线运动模块延伸方向移动;
9.所述导向杆安装在滑动连接块上并通过所述滑动连接块相对直线运动模块移动,所述导向杆延伸方向垂直于直线运动模块延伸方向;
10.所述智能落粉机构组件安装在导向杆上并允许沿所述导向杆延伸方向移动,所述智能落粉机构组件允许通过所述滑动连接块相对所述直线运动模块移动;
11.所述智能落粉机构组件安装出粉喷头组件,所述出粉喷头组件允许沿直线运动模块和导向杆延伸方向移动并覆盖成型区域;
12.所述智能落粉机构组件和所述直线运动模块连接所述中央控制器。
13.优选地,所述智能落粉机构组件还包括:粉箱、落粉机构箱体、第二下粉管、振动箱、滑动盖板、第一电磁阀、出粉槽以及并联下粉槽运动机构;
14.所述落粉机构箱体顶部外侧安装多个粉箱,所述落粉机构箱体顶部内侧安装多个
并联下粉槽运动机构,所述粉箱与所述并联下粉槽运动机构一一对应,对应所述粉箱与所述并联下粉槽运动机构之间设置通孔;
15.所述落粉机构箱体内部安装所述振动箱,所述振动箱通过第二下粉管连接所述并联下粉槽运动机构;
16.所述振动箱底部设置出粉槽,所述出粉槽和振动箱之间安装滑动盖板;
17.所述落粉机构箱体底部外侧设置出粉喷头组件,所述出粉喷头组件连通出粉槽,所述出粉喷头组件和出粉槽之间安装第一电磁阀。
18.优选地,所述粉箱包括:推杆、顶盖、活塞板、粉箱壁板以及抽拉板;
19.所述粉箱壁板安装在落粉机构箱体上,所述粉箱壁板和所述落粉机构箱体之间安装抽拉板,所述粉箱壁板背向所述落粉机构箱体一端安装顶盖;
20.所述粉箱壁板朝向所述抽拉板一侧开口设置为下口;
21.所述粉箱壁板内安装活塞板,所述活塞板背向抽拉板一侧安装推杆;
22.所述活塞板和所述抽拉板之间放置粉末。
23.优选地,所述并联下粉槽运动机构包括:第二电磁阀、第三电磁阀、第二下粉槽、第二密封顶板、第一密封顶板、水平运动装置以及第一下粉槽;
24.所述水平运动装置、第一密封顶板以及第二密封顶板安装在落粉机构箱体顶部内侧;
25.所述水平运动装置连接并带动所述第一密封顶板和第二密封顶板移动,所述粉箱通过所述水平运动装置带动所述第一密封顶板和第二密封顶板移动实现第一密封顶板或第二密封顶板与所述粉箱对接;
26.所述第一密封顶板背向所述落粉机构箱体顶部内壁一侧安装第一下粉槽,所述第二密封顶板背向所述落粉机构箱体顶部内壁一侧安装第二下粉槽;
27.所述第一下粉槽背向第一密封顶板一侧安装所述第二电磁阀,所述第二下粉槽背向第二密封顶板一侧安装所述第三电磁阀;
28.所述第一密封顶板和第二密封顶板上设置开口。
29.优选地,所述第一下粉槽通过第一下粉管连接粉末循环模块;
30.所述落粉机构箱体侧壁设置下粉管连接块,所述第一下粉管通过所述下粉管连接块穿过落粉机构箱体;
31.所述粉末循环模块连接粉箱,所述粉末循环模块和粉箱之间安装第四电磁阀;
32.所述粉末循环模块内安装抽气装置、过滤装置和排气装置。
33.优选地,所述出粉喷头组件包括:前端出粉细口、振动器以及前端出粉槽;
34.所述前端出粉槽连通出粉槽,所述前端出粉槽背向出粉槽一端向外延伸出前端出粉细口;
35.所述前端出粉细口设置为矩形出口;
36.所述前端出粉槽和所述前端出粉细口连接处侧面环绕安装振动器。
37.优选地,所述落粉机构箱体外侧安装多个粉量监测反馈模块;
38.每个所述粉箱侧边安装一个所述粉量监测反馈模块。
39.优选地,所述粉箱连接所述落粉机构箱体处、所述第一密封顶板的开口周侧以及所述第二密封顶板的开口周侧设置o型密封圈。
40.优选地,所述活塞板允许绕所述粉箱横截面轴线转动;
41.所述成型区域排布多个正方形区域。
42.优选地,一种权利要求所述粉末组分可控铺粉集成装置的工作方法,包括以下步骤:
43.步骤s1,所述中央控制器控制关闭多个所述粉箱的抽拉板,然后控制所有粉箱内的活塞板旋转,将不同种类的粉末分别放入到多个所述粉箱中,此时所述粉箱内的粉末表面都是不平整的;
44.所述中央控制器控制所述水平运动装置移动,将多个所述第一下粉槽分别对准粉箱的下口处,同时使所述第二电磁阀均保持关闭状态,然后中央控制器部分打开所有抽拉板至所述粉箱内气体在活塞板下移时可以排除,同时将所有所述活塞板重新旋转到水平位置并控制所有推杆往下移动,在所述推杆移动过程中伴随有粉末从粉箱流出并分别进入所述第一下粉槽中,直至粉末上表面与所述活塞板之间没有空隙,然后关闭所有抽拉板;
45.步骤s2,所述中央控制器打开所有第二电磁阀,同时关闭所有第四电磁阀,所有所述粉末循环模块的抽气装置开启,将第一下粉槽中的粉末抽入到所述粉末循环模块的过滤装置中,然后关闭所有第二电磁阀,抬升所述活塞板并再次旋转,同时打开所有第四电磁阀,所述粉末循环模块的排气装置开启,粉末分别进入到粉箱中,然后将所有活塞板重新旋转到水平位置,随后推动活塞板直至活塞板下表面与粉末上表面贴合,中央控制器控制所有水平运动装置运动至所有第二下粉槽分别对准粉箱的下口;
46.步骤s3,将所有第三电磁阀保持关闭状态,打开所述抽拉板,此时所述粉量监测反馈模块开始工作,实时记录各粉箱内粉末的高度;
47.步骤s4,根据所述成型区域的每个正方形区域所需要的粉末质量以及预先设定的组分配比,计算出每个正方形区域所需要的各粉箱内粉末的质量,然后根据各粉末的密度计算出对应的粉末下降高度,当每个粉箱内粉末上表面的高度分别下降了计算出的各自下降高度后,关闭相应粉箱的抽拉板;
48.步骤s5,所述中央控制器打开所有第三电磁阀,同时将所述滑动盖板关闭,位于所有第二下粉槽里面的粉末滑落到所述振动箱中,然后开启所述振动箱,所有粉末均匀混合;
49.步骤s6,使所述第一电磁阀处于关闭状态,打开滑动盖板,混合后的粉末到达所述出粉槽的下,然后关闭所述滑动盖板,中央控制器打开出所述振动器;
50.打开所述第一电磁阀,整个所述智能落粉机构组件开始按照设定轨迹移动,在移动过程中,混合后的粉末不断从所述前端出粉细口落下,当完成一个区域的移动后,该区域的混合粉末层准备完成;
51.所述智能落粉机构组件在本区域的移动过程中,同时重复步骤s4至步骤s6进行下一个区域内的混合粉末的质量和组分的配比,当前区域完成铺粉时,下一个区域的混合粉末已在所述振动箱内准备完成;
52.步骤s7,所述智能落粉机构组件继续运动,完成运动轨迹上下一个区域的铺粉操作,直至整个成型区域的铺粉工作都已完成,这样成型区域完整的一层粉末准备完成,然后中所述央控制器控制光路系统开始工作;
53.步骤s8,重复步骤s3至步骤s7,直至整个工件成型完成。
54.优选地,所述活塞板旋转70
°‑
80
°
。
55.优选地,直线运动模块可选用同步带同步轮、滚珠丝杆副或者直线电机。
56.优选地,所述粉箱横截面设置为圆形。
57.优选地,所述前端出粉细口设置为矩形出口,所述矩形出口的短边尺寸为3-5倍粉末的平均粒径,所述矩形出口的长边尺寸与成型区域的正方形区域的边长相等。
58.优选地,所述第一密封顶板和所述第二密封顶板的开口都设置为圆形且尺寸相同。
59.与现有技术相比,本发明具有如下的有益效果:
60.本发明解决现有的增材制造过程铺粉工艺只能形成一层同一种材料的粉床的问题,实现了粉床每个区域材料组分可控的功能,为诸如梯度材料等相关工艺研究奠定了基础。
附图说明
61.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
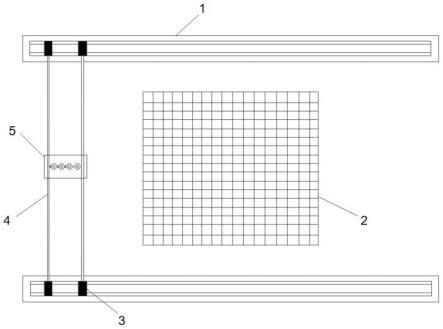
62.图1为粉末组分可控铺粉集成装置俯视图;
63.图2为智能落粉机构组件结构示意图;
64.图3为出粉喷头组件结构示意图;
65.图4为并联下粉槽运动机构结构示意图。
66.图中所示:
67.68.具体实施方式
69.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
70.实施例1
71.如图1所示,本实施例包括:直线运动模块1、滑动连接块3、导向杆4、智能落粉机构组件5以及中央控制器;滑动连接块3安装在直线运动模块1上并允许沿直线运动模块1延伸方向移动;导向杆4安装在滑动连接块3上并通过滑动连接块3相对直线运动模块1移动,导向杆4延伸方向垂直于直线运动模块1延伸方向,智能落粉机构组件5安装在导向杆4上并允许沿导向杆4延伸方向移动,智能落粉机构组件5允许通过滑动连接块3相对直线运动模块1移动,智能落粉机构组件5安装出粉喷头组件511,出粉喷头组件511允许沿直线运动模块1和导向杆4延伸方向移动并覆盖成型区域2;智能落粉机构组件5和直线运动模块1连接中央控制器。
72.如图2所示,智能落粉机构组件5还包括:粉箱、落粉机构箱体507、第二下粉管508、振动箱509、滑动盖板510、第一电磁阀512、出粉槽513以及并联下粉槽运动机构515;落粉机构箱体507顶部外侧安装多个粉箱,落粉机构箱体507顶部内侧安装多个并联下粉槽运动机构515,粉箱与并联下粉槽运动机构515一一对应,对应粉箱与并联下粉槽运动机构515之间设置通孔;落粉机构箱体507内部安装振动箱509,振动箱509通过第二下粉管508连接并联下粉槽运动机构515,振动箱509底部设置出粉槽513,出粉槽513和振动箱509之间安装滑动盖板510;落粉机构箱体507底部外侧设置出粉喷头组件511,出粉喷头组件511连通出粉槽513,出粉喷头组件511和出粉槽513之间安装第一电磁阀512。粉箱包括:推杆501、顶盖502、活塞板503、粉箱壁板504以及抽拉板506;粉箱壁板504安装在落粉机构箱体507上,粉箱壁板504和落粉机构箱体507之间安装抽拉板506,粉箱壁板504背向落粉机构箱体507一端安装顶盖502。粉箱壁板504朝向抽拉板506一侧开口设置为下口,粉箱壁板504内安装活塞板503,活塞板503背向抽拉板506一侧安装推杆501,活塞板503和抽拉板506之间放置粉末505。落粉机构箱体507外侧安装多个粉量监测反馈模块516,每个粉箱侧边安装一个粉量监测反馈模块516。成型区域2排布多个正方形区域。
73.如图3所示,出粉喷头组件511包括:前端出粉细口5111、振动器5112以及前端出粉槽5113;前端出粉槽5113连通出粉槽513,前端出粉槽5113背向出粉槽513一端向外延伸出
前端出粉细口5111,前端出粉细口5111设置为矩形出口,前端出粉槽5113和前端出粉细口5111连接处侧面环绕安装振动器5112。
74.如图4所示,并联下粉槽运动机构515包括:第二电磁阀5151、第三电磁阀5152、第二下粉槽5153、第二密封顶板5154、第一密封顶板5155、水平运动装置5156以及第一下粉槽5157;水平运动装置5156、第一密封顶板5155以及第二密封顶板5154安装在落粉机构箱体507顶部内侧,水平运动装置5156连接并带动第一密封顶板5155和第二密封顶板5154移动,粉箱通过水平运动装置5156带动第一密封顶板5155和第二密封顶板5154移动实现第一密封顶板5155或第二密封顶板5154与粉箱对接,第一密封顶板5155背向落粉机构箱体507顶部内壁一侧安装第一下粉槽5157,第二密封顶板5154背向落粉机构箱体507顶部内壁一侧安装第二下粉槽5153,第一下粉槽5157背向第一密封顶板5155一侧安装第二电磁阀5151,第二下粉槽5153背向第二密封顶板5154一侧安装第三电磁阀5152,第一密封顶板5155和第二密封顶板5154上设置开口。第一下粉槽5157通过第一下粉管519连接粉末循环模块517,落粉机构箱体507侧壁设置下粉管连接块514,第一下粉管519通过下粉管连接块514穿过落粉机构箱体507,粉末循环模块517连接粉箱,粉末循环模块517和粉箱之间安装第四电磁阀518,粉末循环模块517内安装抽气装置、过滤装置和排气装置。粉箱连接落粉机构箱体507处、第一密封顶板5155的开口周侧以及第二密封顶板5154的开口周侧设置o型密封圈。活塞板503允许绕粉箱横截面轴线转动。
75.粉末组分可控铺粉集成装置的工作方法,包括以下步骤:步骤s1,中央控制器控制关闭多个粉箱的抽拉板506,然后控制所有粉箱内的活塞板503旋转,将不同种类的粉末505分别放入到多个粉箱中,此时粉箱内的粉末505表面都是不平整的;中央控制器控制水平运动装置5156移动,将多个第一下粉槽5157分别对准粉箱的下口处,同时使第二电磁阀5151均保持关闭状态,然后中央控制器部分打开所有抽拉板506至粉箱内气体在活塞板503下移时可以排除,同时将所有活塞板503重新旋转到水平位置并控制所有推杆501往下移动,在推杆501移动过程中伴随有粉末505从粉箱流出并分别进入第一下粉槽5157中,直至粉末505上表面与活塞板503之间没有空隙,然后关闭所有抽拉板506;步骤s2,中央控制器打开所有第二电磁阀5151,同时关闭所有第四电磁阀518,所有粉末循环模块517的抽气装置开启,将第一下粉槽5157中的粉末505抽入到粉末循环模块517的过滤装置中,然后关闭所有第二电磁阀5151,抬升活塞板503并再次旋转,同时打开所有第四电磁阀518,粉末循环模块517的排气装置开启,粉末505分别进入到粉箱中,然后将所有活塞板503重新旋转到水平位置,随后推动活塞板503直至活塞板503下表面与粉末505上表面贴合,中央控制器控制所有水平运动装置5156运动至所有第二下粉槽5153分别对准粉箱的下口;步骤s3,将所有第三电磁阀5152保持关闭状态,打开抽拉板506,此时粉量监测反馈模块516开始工作,实时记录各粉箱内粉末505的高度;步骤s4,根据成型区域2的每个正方形区域所需要的粉末505质量以及预先设定的组分配比,计算出每个正方形区域所需要的各粉箱内粉末505的质量,然后根据各粉末505的密度计算出对应的粉末505下降高度,当每个粉箱内粉末505上表面的高度分别下降了计算出的各自下降高度后,关闭相应粉箱的抽拉板506;步骤s5,中央控制器打开所有第三电磁阀5152,同时将滑动盖板510关闭,位于所有第二下粉槽5153里面的粉末505滑落到振动箱509中,然后开启振动箱509,所有粉末505均匀混合;步骤s6,使第一电磁阀512处于关闭状态,打开滑动盖板510,混合后的粉末505到达出粉槽513的下,然后关闭滑
动盖板510,中央控制器打开出振动器5112;打开第一电磁阀512,整个智能落粉机构组件5开始按照设定轨迹移动,在移动过程中,混合后的粉末505不断从前端出粉细口5111落下,当完成一个区域的移动后,该区域的混合粉末层准备完成;智能落粉机构组件5在本区域的移动过程中,同时重复步骤s4至步骤s6进行下一个区域内的混合粉末的质量和组分的配比,当前区域完成铺粉时,下一个区域的混合粉末已在振动箱509内准备完成;步骤s7,智能落粉机构组件5继续运动,完成运动轨迹上下一个区域的铺粉操作,直至整个成型区域2的铺粉工作都已完成,这样成型区域2完整的一层粉末准备完成,然后中央控制器控制光路系统开始工作;步骤s8,重复步骤s3至步骤s7,直至整个工件成型完成。
76.实施例2
77.实施例2作为实施例1的优选例。
78.如图1所示,本实施例包括:直线运动模块1、滑动连接块3、导向杆4、智能落粉机构组件5以及中央控制器;智能落粉机构组件5可通过滑动连接块3由直线运动模块1驱动实现水平方向上的左右运动,同时也可沿导向杆4实现水平方向上的前后运动,智能落粉机构组件5底部的出粉喷头组件511可覆盖整个成型区域2。智能落粉机构组件5能够实现多种粉末505按照精确组分配比进行均匀混合,然后将混合均匀的粉末均匀地铺在成型区域2的一个特定微小区域,上一个微小区域铺粉进行过程中,智能落粉机构组件5能够进行运动轨迹中下一个微小区域的粉末混合过程,这样智能落粉机构组件5沿着预定设定的运动轨迹移动完成后,成型区域2的每个微小区域都能够按照预定的粉末组分配比完成铺粉,整个成型区域2铺粉完成后,光路系统开始工作直至完成成型区域2的单层粉末扫描,不断重复直至整个工件成型完成,成型后的工件每个区域都可以按照预设的粉末组分配比。
79.如图2所示,智能落粉机构组件5主要具体包括:推杆501、顶盖502、活塞板503、粉箱壁板504、粉末505、抽拉板506、落粉机构箱体507、第二下粉管508、振动箱509、滑动盖板510、出粉喷头组件511、第一电磁阀512、出粉槽513、下粉管连接块514、并联下粉槽运动机构515、粉量监测反馈模块516、粉末循环模块517以及第四电磁阀518组成,四个可装载四种粉末505的粉箱横截面为圆形,四个粉箱的底部分别设有o型圈,可与落粉机构箱体507的顶面实现密封。
80.如图3所示,出粉喷头组件511由前端出粉细口5111、振动器5112以及前端出粉槽5113组成,前端出粉细口5111为矩形出口,矩形短边尺寸为3-5倍四种粉末505的平均粒径,这样有助于前端出粉细口5111少量并均匀地出粉,矩形长边尺寸与成型区域2的微小正方形区域的边长相等,前端出粉槽5113可少量储存即将从前端出粉细口5111掉落的粉末,振动器5112环绕前端出粉槽5113的底部,振动器5112打开能够使粉末顺畅滑下,避免堵粉现象发生。
81.如图4所示,并联下粉槽运动机构515包括:第二电磁阀5151、第三电磁阀5152、第一下粉槽5157、第二下粉槽5153、第一密封顶板5155、第二密封顶板5154、水平运动装置5156,第一下粉槽5157、第二下粉槽5153可以储存相对应的粉箱掉落的粉末505,第一密封顶板5155、第二密封顶板5154的开口都为圆形且尺寸相同,同时第一密封顶板5155、第二密封顶板5154开口的周圈为o型圈,可与落粉机构箱体507的顶板下表面实现密封,水平运动装置5156可以有选择地将第一下粉槽5157的开口或者第二下粉槽5153的开口对准相应的粉箱下口。
82.与四个粉箱相对应的第二下粉槽5153各有一根第二下粉管508与振动箱509连接,当滑动盖板510关闭后,四个并联下粉槽运动机构515的第三电磁阀5152打开,来自四个第二下粉槽5153的粉末505进入到振动箱509中,振动箱509开启后,来自四个第二下粉槽5153的四种不同种类的粉末得到充分的混合。
83.粉末循环模块517内部设有过滤装置、抽气装置与排气装置,抽气装置开启后,打开第二电磁阀5151,关闭第四电磁阀518,第一下粉槽5157中的粉末被抽到粉末循环模块517内部的过滤装置,然后关闭第二电磁阀5151,打开第四电磁阀518,排气装置开启,粉末从过滤装置离开后穿过粉箱上方的顶盖502重新进入到粉箱中,推杆501下方的活塞板503可沿与粉箱纵截面垂直的轴旋转,这样重新进入到粉箱中的粉末505可停留在活塞板503的下方。粉量监测反馈模块516共有四个,分别设置在四个粉箱的左边,可以实时精确监测粉箱内的粉末505高度h1、h2、h3、h4以及粉末505顶面的下降高度
△
h1、
△
h2、
△
h3、
△
h4。
84.使本实施例的工作方法步骤如下:
85.步骤t1,首先中央控制器发出指令关闭四个粉箱底部的抽拉板506,然后控制四个粉箱内的活塞板503旋转70
°
~80
°
,然后将四种不同种类的粉末分别放入到四个粉箱中,此时四个粉箱内的粉末505表面都是不平整的,然后中央控制器发出指令,控制四个并联下粉槽运动机构515的水平运动装置5156移动,将四个第一下粉槽5157对准四个粉箱的下口,同时使四个第二电磁阀5151保持关闭状态,然后中央控制器稍微打开四个粉箱的抽拉板506,同时将四个粉箱内的活塞板503重新旋转到水平位置,然后控制四个推杆501往下移动,少量的粉末从四个粉箱中流出进入四个第一下粉槽5157中,直至粉末上表面与活塞板503之间没有空隙,然后关闭四个抽拉板506;
86.步骤t2,中央控制器打开四个第二电磁阀5151,同时关闭四个第四电磁阀518,四个粉末循环模块517的抽气装置开启,将四个第一下粉槽5157中的少量粉末分别抽入到四个粉末循环模块中的过滤装置中,可过滤掉内管壁的一些杂质,然后关闭四个第二电磁阀5151,抬升四个粉箱内的活塞板503并再次旋转70
°‑
80
°
,同时打开四个第四电磁阀518,四个粉末循环模块517的排气装置开启,四个过滤装置中的粉末进入到四个粉箱中,然后将四个粉箱内的活塞板503重新旋转到水平位置,随后推动活塞板503直至活塞板503下表面与粉末505上表面贴合,中央控制器控制四个并联下粉槽运动机构515的水平运动装置5156向左运动,直至四个第二下粉槽5153完全对准四个粉箱的下口;
87.步骤t3,然后使四个第三电磁阀5152保持关闭状态,并使四个抽拉板506打开相同的程度,此时四个粉量监测反馈模块516开始工作,实时记录粉箱内粉末505的高度;
88.步骤t4,根据成型区域2的每个微小正方形区域所需要的粉末质量以及预先设定的组分配比,计算出每个微小正方形区域所需要的四种粉末505的质量,然后根据四种粉末505的密度计算出对应的粉末505下降高度
△
h1、
△
h2、
△
h3、
△
h4,当每个粉箱内粉末上表面的高度分别下降了
△
h1、
△
h2、
△
h3、
△
h4后,关闭相应的抽拉板506;
89.步骤t5,中央控制器打开四个第三电磁阀5152,同时将滑动盖板510关闭,位于四个第二下粉槽5153里面的四种粉末505滑落到振动箱509中,然后开启振动箱509,四种粉末均与地混合;
90.步骤t6,使第一电磁阀512处于关闭状态,打开滑动盖板510,混合后的粉末到达出粉槽513的下部管状区域底部,然后关闭滑动盖板510,中央控制器打开出粉喷头组件511的
振动器5112,然后打开第一电磁阀512,同时按照预定设定的运动轨迹,整个智能落粉机构组件5开始移动,在移动过程中,混合后的粉末不断从出粉喷头组件511的前端出粉细口5111落下,当完成一个微小区域的移动后,该微小区域的混合粉末层准备完成,在智能落粉机构组件5在本微小区域的移动过程中,按照运动轨迹上的下一个微小区域内的混合粉末的质量以及组分配比,重复步骤t4至步骤t6,当前微小区域完成铺粉时,运动轨迹上的下一个微小区域的混合粉末已在振动箱509内准备完成;
91.步骤t7,然后智能落粉机构组件5继续运动,完成运动轨迹上下一个微小区域的铺粉操作;
92.步骤t8,不断重复以上操作,直至整个成型区域2的所有微小区域的铺粉工作都已完成,这样成型区域2完整的一层粉末准备完成,然后中央控制器控制光路系统开始工作;
93.步骤t9,按照单层供粉、铺粉以及扫描的方法,不断重复直至整个工件成型完成,成型后的工件实现了每个区域的工艺材料组分的预先设定。
94.本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统及其各个装置、模块、单元以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统及其各个装置、模块、单元以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同功能。所以,本发明提供的系统及其各项装置、模块、单元可以被认为是一种硬件部件,而对其内包括的用于实现各种功能的装置、模块、单元也可以视为硬件部件内的结构;也可以将用于实现各种功能的装置、模块、单元视为既可以是实现方法的软件模块又可以是硬件部件内的结构。
95.在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
96.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1