一种调平系统及增材制造设备的制作方法
1.本发明涉及3d打印技术领域,尤其涉及一种调平系统及增材制造设备。
背景技术:
2.光固化增材制造设备中,顶板上设置有透光屏,树脂盒盛放树脂后放置于透光屏上,离型膜与透光屏贴合,成型平台浸入树脂中并与树脂盒底部离型膜保持均匀缝隙,将光源按照待成型物体的截面形状照射在离型膜一侧树脂上,使得成型平台与离型膜之间的树脂发生固化,逐层叠加实现立体打印。
3.模型第一层的形成非常重要,成型平台成型面与离型膜之间具有均匀的间隙,由于离型膜依靠透光屏支撑,离型膜的倾斜度以及平整度均由透光屏决定,因此,保证透光屏与使成型平台成型面平行且距离精确,可以保证打印产品的精度。由于更换成型平台或机械误差容易使成型平台和透光屏的纵向位置改变,如成型平台的成型面与透光屏不平行或间距改变,将导致模型的第一层无法粘合于成型平台,或者模型的第一层在成型平台上的粘合力度不均匀,模型打印过程中的稳定性不好,模型倾斜会造成打印失真。
4.现有的调平技术包括对成型平台进行调平,以保证成型平台的成型面与透光屏平行,这将导致成型平台位置不稳固,成型平台易在打印过程中发生松动。或者,调平技术还包括对树脂盒进行调平,如公开号为cn208841857u的专利中,公开了光固化增材制造设备的调平机构,设置有打印托盘,螺旋杆通过轴承与打印托盘构成活动结构,当螺旋杆对打印托盘进行调平工作时,通过轴承与螺旋杆的活动作用,使得与轴承呈固定连接的打印托盘能够平稳的进行上下旋转操作,且活动环连接的水准仪,通过观察水准仪内侧的气泡是否处于中间部位,判断打印托盘是否处于平整状态。通过螺旋杆的手动旋转,配合观察水准仪进行打印托盘调平,需要反复进行螺旋杆的调整和观察,以使得打印托盘达到水平,过程繁琐,操作过程耗时长。
技术实现要素:
5.有鉴于此,本发明实施例提供一种调平系统及增材制造设备,主要通过处理器单元控制调平单元调整支撑单元的倾斜角度和高度,实现对支撑单元的自动调平,避免手动调整误差。
6.为达到上述目的,本发明主要提供如下技术方案:
7.一方面,本发明实施例提供了一种调平系统,调平系统包括:
8.支撑单元,所述支撑单元上用于设置树脂盒;
9.多个调平单元,所述调平单元与所述支撑单元连接;
10.处理器单元和调平电路,所述处理器单元与所述调平电路电连接,所述调平电路与所述调平单元电连接,所述处理器单元用于通过所述调平电路控制所述调平单元调整所述支撑单元的倾斜角度和高度。
11.其中,所述调平电路包括电平转换电路;
12.所述电平转换电路的输入端与所述处理器单元电连接,所述电平转换电路的输出端与所述调平单元电连接,所述电平转换电路的输出端的数量与所述调平单元的数量对应;
13.所述电平转换电路用于对所述处理器单元发出的第一控制信号进行电平转换,生成用于控制所述调平单元的第二控制信号;
14.所述电平转换电路包括转换芯片,所述调平系统还包括供电单元,所述转换芯片的电源端与所述供电单元电连接,所述转换芯片的输入端与所述处理器单元电连接,所述转换芯片的输出端分别与多个所述调平单元电连接,所述转换芯片的输出端的数量与所述调平单元的数量对应;
15.所述转换芯片用于将所述第一控制信号转换为所述第二控制信号。
16.其中,所述调平电路还包括多个驱动电路,所述驱动电路的数量与所述调平单元的数量对应,所述驱动电路的第一端与所述电平转换电路的输出端电连接,所述驱动电路的第二端与所述调平单元电连接;
17.所述驱动电路包括第一电阻、第一电容和第二电容;
18.所述第一电阻的第一端与所述电平转换电路的输出端电连接,所述第一电阻的第二端与所述调平单元电连接,所述第一电容的第一端与所述第一电阻的第二端电连接,所述第一电容的第二端接地,所述调平单元的供电端分别与第二电容的第一端和所述供电单元电连接,所述第二电容的第二端接地;
19.所述第一电阻用于调平单元的过流保护,所述第一电容和所述第二电容用于滤波。
20.其中,所述调平系统还包括多个检测单元,所述检测单元的数量与所述调平单元的数量相同,所述检测单元与所述调平单元一一对应连接,所述检测单元相对增材制造设备的成型平台设置,用于检测所述成型平台的位置,并产生检测信号;
21.所述调平电路还包括信号采集电路,所述信号采集电路的输入端的数量与所述检测单元的数量对应,所述信号采集电路的输入端与所述检测单元电连接,所述信号采集电路的输出端与所述处理器单元电连接;
22.所述信号采集电路用于根据所述检测信号输出所述成型平台的位置信息,所述处理器单元用于根据所述位置信息控制所述调平单元调整所述支撑单元的倾斜角度和高度;
23.所述信号采集电路包括采集芯片、上拉电阻组件和第三电容;
24.所述采集芯片的输入端与所述检测单元电连接,所述采集芯片的输出端与所述处理器单元电连接,所述上拉电阻组件的第一端与所述供电单元电连接,所述上拉电阻组件的第二端与所述采集芯片的输出端电连接,所述第三电容的第一端与所述供电单元电连接,且所述第三电容的第一端与所述采集芯片的供电端电连接,所述第三电容的第二端接地;
25.所述采集芯片用于根据所述检测信号输出所述成型平台的位置信息。
26.其中,所述调平电路还包括分压电路,所述分压电路的数量与所述检测单元的数量对应,所述分压电路的第一端与所述检测单元的输出端电连接,所述分压电路的第二端与所述信号采集电路的输入端电连接;
27.所述分压电路包括第五电阻和第四电容;
28.所述第五电阻的第一端与所述检测单元电连接,所述第五电阻的第二端与所述采集芯片的输入端电连接,所述第四电容的第一端与所述供电单元电连接,且所述第四电容的第一端与所述检测单元的供电端电连接,所述第四电容的第二端接地。
29.其中,所述调平系统还包括连接单元,所述连接单元分别与所述处理器单元和所述调平电路电连接;
30.所述连接单元用于所述处理器单元和所述调平电路之间的数据传送。
31.其中,所述调平系统还包括供电单元,所述供电单元包括电源、第一转换单元和第二转换单元,所述电源与所述第一转换单元电连接,所述第一转换单元与所述调平电路电连接,所述第二转换单元分别与所述处理器单元和所述调平电路电连接;
32.所述第一转换单元和所述第二转换单元用于电平转换以及为所述调平电路供电。
33.其中,所述调平单元包括第一固定件、驱动器和第一活动件;
34.所述第一活动件与所述第一固定件活动连接,所述第一活动件与所述支撑单元连接,所述驱动器分别与所述第一固定件和所述第一活动件连接,所述驱动器与所述调平电路电连接;
35.所述处理器单元用于控制所述驱动器,以使所述驱动器驱动所述第一活动件相对所述第一固定件移动,以进行所述支撑单元的调平。
36.其中,所述检测单元包括第二固定件、检测器和第二活动件;
37.所述第二固定件与所述支撑单元连接,所述检测器与所述第二固定件连接,所述第二活动件与所述第二固定件活动连接,所述第二活动件的第一端与所述检测器相对,所述第二活动件的第二端与所述成型平台对应设置;
38.所述调平电路与所述检测器电连接;
39.所述第二活动件用于在所述成型平台的作用下移动,所述检测器用于根据所述第二活动件的位移量生成所述检测信号。
40.另一方面,本发明还提供一种增材制造设备,包括如上述任一项所述的调平系统,以及打印机本体、光源组件、导向架组件和成型平台,所述光源组件和所述成型平台均与所述处理器单元电连接,所述调平单元与所述打印机本体连接,所述光源组件设置于所述打印机本体内,所述导向架组件设置于所述打印机本体上,所述成型平台与所述导向架组件连接;
41.所述处理器单元用于控制所述光源组件发出的光线投射到所述支撑单元的透光口上、控制所述成型平台相对所述支撑单元移动以进行3d打印,以及控制所述调平单元对所述支撑单元进行调平。
42.本发明实施例提出的一种调平系统及增材制造设备,主要通过处理器单元控制调平单元调整支撑单元的倾斜角度和高度,实现对支撑单元的自动调平,避免手动调整误差。现有技术中,对成型平台进行调平,将导致成型平台位置不稳固,成型平台易在打印过程中发生松动,对树脂盒进行调平,通过手动操作进行调平,过程繁琐,操作过程耗时长,准确性低。与现有技术相比,本技术文件中,支撑单元与打印机本体之间设置多个调平单元,通过处理器单元控制调平单元调整支撑单元的角度,以实现支撑单元上承托的树脂盒的角度调节,使得树脂盒的离型膜与成型平台的成形面的距离均匀,保证模型的准确打印。
附图说明
43.图1为本发明实施例提供的一种调平系统的结构框图;
44.图2为本发明实施例提供的一种调平系统的部分结构示意图;
45.图3为本发明实施例提供的一种调平系统中调平单元和检测单元的结构示意图;
46.图4为本发明实施例提供的一种调平系统中调平单元和检测单元的部分组成结构爆炸示意图;
47.图5为本发明实施例提供的一种电平转换电路和第一连接器的电路图;
48.图6为本发明实施例提供的一种驱动电路的电路图;
49.图7为本发明实施例提供的一种信号采集电路的电路图;
50.图8为本发明实施例提供的一种分压电路的电路图;
51.图9为本发明实施例提供的一种第二连接器的电路图;
52.图10为本发明实施例提供的一种第一转换单元的电路图;
53.图11为本发明实施例提供的一种第二转换单元的电路图。
具体实施方式
54.为更进一步阐述本发明为达成预定发明目的所采取的技术手段及功效,以下结合附图及较佳实施例,对依据本发明提出的一种调平系统及增材制造设备其具体实施方式、结构、特征及其功效,详细说明如后。
55.一方面,如图1所示,本发明实施例提供了一种调平系统,用于增材制造设备,增材制造设备包括打印机本体和成型平台800,调平系统包括:
56.一种调平系统,其特征在于,调平系统包括:
57.支撑单元100,支撑单元100上用于设置树脂盒;
58.多个调平单元200,调平单元200与支撑单元100连接;
59.处理器单元300和调平电路400,处理器单元300与调平电路400电连接,调平电路400与调平单元200电连接,处理器单元300用于通过调平电路400控制调平单元200调整支撑单元100的倾斜角度和高度。
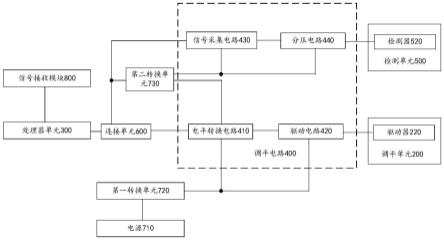
60.其中,打印机本体具体可以为增材制造设备的底座箱体,支撑单元100可以位于底座箱体的顶端,一种实施方式中,支撑单元100为扁平状框架结构,支撑单元100包括透光口110,根据打印机的类型不同,透光口110用于铺设不同透光件,如在下透光的增材制造设备中,底座箱体内设置有光机组件,透光口110铺设透光板,透光板可以为亚克力板或者玻璃板,透光板位于光机组件上方,光机组件发出特定轮廓的光线透过透光板后,投射到透光板上方的树脂盒上。
61.或者,透光口110铺设选通器,选通器通过显示特定轮廓的图像,使得光机组件发出的光线以特定轮廓通过,进而使选通器上的树脂盒内打印树脂以特定轮廓固化。选通器可以为led屏。
62.调平单元200设置于底座箱体和支撑单元100之间,调平单元200的数量可以为两个,两个调平单元200分别连接于透光口110的至少两侧的支撑单元100上,如位于透光口110的左右两侧,或者调平单元200的数量可以为三个,三个调平单元200位于透光口110不同侧,或者调平单元200的数量可以为四个,四个调平单元200分别对应透光口110的四角设
置。设置于透光口110的至少两侧,通过在不同位置进行支撑单元100高度的不同程度的调节,进而改变支撑单元100的角度,进而使得透光件的角度改变。
63.处理器单元300具体可以为mcu,用于接收数据、计算以及输出控制信号,以控制调平单元200动作,实现支撑单元100的自动调平。处理器单元300连接有信号接收模块800,一种实施方式中,信号接收模块800连接用户终端,处理器单元300可通过接收用户指令进行调平,如用户可以对下达对指定调平单元200的调平指令,使得调平单元200根据调平指令调整支撑单元100的高度,进而实现对支撑单元100的灵活调整。或者,另一种实施方式中,信号接收模块800可以为固定在底座箱体上的开关按键,或触摸屏上的按钮,通过按压开关按键向处理器单元300发送信号启动调平,处理器单元300根据设定好的程序进行自动调平。调平系统还可以包括检测单元500,检测单元500获取成型平台800的成形面的位置信息,处理器单元300获取位置信息,根据位置信息进行支撑单元100的角度调节,以使支撑单元100的角度与成形面的角度一致。
64.调平电路400用于获取检测单元500中检测器520产生的检测信号,并生成成型平台800的位置信息后发送给处理器单元300,以供处理器单元300解析后产生针对一个或多个调平单元200的第一控制信号,第一控制信号通过调平电路400进行电平转换,使得第一控制信号转换为可以控制如调平单元200中驱动器220的第二控制信号,继而控制调整支撑单元100的倾斜角度或高度。具体调节方法以及调平电路400的具体实现方式将在下文中进行详细说明。
65.本发明实施例提出的一种调平系统及增材制造设备,主要通过处理器单元控制调平单元调整支撑单元的角度,实现对支撑单元的自动调平,避免手动调整误差。现有技术中,对成型平台进行调平,将导致成型平台位置不稳固,成型平台易在打印过程中发生松动,对树脂盒进行调平,通过手动操作进行调平,过程繁琐,操作过程耗时长,准确性低。与现有技术相比,本技术文件中,支撑单元与打印机本体之间设置多个调平单元,通过处理器单元控制调平单元调整支撑单元的角度,以实现支撑单元上承托的树脂盒的角度调节,使得树脂盒的离型膜与成型平台的成形面的距离均匀,保证模型的准确打印。
66.一种实施方式中,如图1和图5所示,调平电路400包括电平转换电路410。电平转换电路410的输入端与处理器单元300电连接,电平转换电路410的输出端与调平单元200电连接,电平转换电路410的输出端的数量与调平单元200的数量对应。电平转换电路410用于对处理器单元300发出的第一控制信号进行电平转换,生成用于控制调平单元200的第二控制信号。
67.电平转换电路410为控制信号的转换电路。一种实施方式中,以调平单元200中驱动器220为舵机为例,舵机的输入信号的电压需为5v,才能控制舵机动作,而处理器单元300输出的控制信号,即第一控制信号为3.3v信号,电平转换电路410用于将3.3v的第一控制信号转化为5v的第二控制信号,以控制舵机动作,继而进行调平。
68.一种实施方式中,如图5所示,电平转换电路410包括转换芯片u1,调平系统包括供电单元,转换芯片u1电源端vcca和vccb与供电单元电连接,转换芯片u1的输入端a1、a2、a3和a4与处理器单元300电连接,转换芯片u1的输出端b1、b2、b3和b4分别与多个调平单元200电连接,转换芯片u1的输出端的数量与调平单元200的数量对应。转换芯片u1用于将第一控制信号转换为第二控制信号。
69.以如图2-4中所示,调平系统包括四个调平单元200,四个调平单元200分别位于透光口110四角的外侧为例说明电平转换电路410的具体原理。转换芯片u1的输入引脚a1、a2、a3和a4均与处理器单元300电连接,用于获取处理器单元300针对四个调平单元200分别发送的第一控制信号,vcca引脚连接供电单元的第二转换单元730的输出端,第二转换单元730为vcca引脚提供3.3v电平,vccb引脚连接供电单元的第一转换单元720的输出端,第一转换单元720为vccb引脚提供5v电平。转换芯片u1根据3.3v电平和5v电平,即可对a1、a2、a3和a4引脚接收到的3.3v的第一控制信号进行转换,产生5v的第二控制信号,通过输出引脚b1、b2、b3和b4输出到舵机,电路中s1、s2、s3和s4分别为四个调平单元200中舵机的接口。
70.电平转换电路410还包括第一滤波电容c0和第二滤波电容c01,第一滤波电容c0的两端分别连接vcca引脚和接地,起到为vcca引脚滤波的作用,第二滤波电容c01的两端分别连接vccb引脚和接地,起到为vccb引脚滤波的作用。转换芯片u1的nc引脚空置,转换芯片u1的0e引脚通过下拉电阻r0接地以及与vcca连接。一种实施方式中,转换芯片u1的vcca引脚通过第一磁珠l3连接第二转换单元730的输出端,第一磁珠l3起到抑制信号线、电源线上的高频噪声和尖峰干扰的作用。
71.本技术实施方式中前述供电单元以及第一转换单元720和第二转换单元730的具体结构将在后文中进行详细说明。
72.一种实施方式中,如图6所示,调平电路400还包括驱动电路420,驱动电路420的数量与调平单元200的数量对应,驱动电路420的第一端与电平转换电路410的输出端电连接,驱动电路420的第二端与调平单元200电连接;驱动电路420包括第一电阻r1、第一电容c1和第二电容c2。第一电阻r1的第一端与电平转换电路410的输出端电连接,第一电阻r1的第二端与调平单元200的驱动器220电连接,第一电容c1的第一端与第一电阻r1的第二端电连接,第一电容c1的第二端接地,调平单元200的供电端分别与第二电容c2的第一端和供电单元的第一转换单元720的输出端电连接,第二电容c2的第二端接地。第一电阻r1用于调平单元200的过流保护,第一电容c1和第二电容c2用于滤波。
73.针对每一个舵机均设置一个驱动电路420,第一电阻r1的第一端与电平转换电路410的输出引脚b1、b2、b3或b4引脚连接,第二控制信号经过第一电容c1滤波后传输到舵机的控制端,舵机的供电电压为5v,舵机的供电端与供电单元的第一转换单元720的输出端电连接,第一转换单元720的输出端用于为舵机提供5v电平,舵机的供电端还连接有第二电容c2,第二电容c2用于滤波。
74.一种实施方式中,如图1-4所示,调平系统还包括多个检测单元500,检测单元500的数量与调平单元200的数量相同,检测单元500与调平单元200一一对应连接,检测单元相对增材制造设备的成型平台800设置,用于检测成型平台800的位置,并产生检测信号。调平电路400还包括信号采集电路430,信号采集电路430的输入端的数量与检测单元500的数量对应,信号采集电路430的输入端与检测单元500电连接,信号采集电路430的输出端与与处理器单元300电连接。信号采集电路430用于根据检测信号输出成型平台800的位置信息,处理器单元300用于根据位置信息控制调平单元200调整支撑单元100的角度。
75.位置信息可以为成形面不同点的高度信息、成形面对调平单元200的触碰信息或者成形面倾斜角度信息等。信号采集电路430用于对检测单元500采集到的模拟量进行模数a/d转换,产生能被处理器单元300接收和进行数据分析的数字信号。
76.一种实施方式中,如图7所示,信号采集电路430包括采集芯片u2、上拉电阻组件和第三电容c3。采集芯片u2的输入端ain0、ain1、ain2和ain3与检测单元500电连接,采集芯片u2的输出端scl和sda分别与处理器单元300电连接,上拉电阻组件的第一端连接供电单元,上拉电阻组件的第二端分别与采集芯片u2的输出端scl和sda电连接,第三电容c3的第一端连接供电单元,且第三电容c3的第一端与采集芯片u2的供电端vdd电连接,第三电容c3的第二端接地。采集芯片u2用于根据检测信号输出成型平台800的位置信息。
77.调平系统包括四个调平单元200时,调平系统还包括四个检测单元500,检测单元500与调平单元200一一对应连接。上拉电阻组件包括第二电阻r2、第三电阻r3和第四电阻r4,采集芯片u2包括第一输出端scl、第二输出端sda和内置比较器输出端alert/rdy,第二电阻r2的第一端连接供电单元的第二转换单元730的输出端,第二电阻r2的第二端与采集芯片u2的内置比较器输出端alert/rdy电连接,第三电阻r3的第一端连接供电单元的第二转换单元730的输出端,第三电阻r3的第二端与采集芯片u2的第一输出端scl电连接,第四电阻r4的第一端连接供电单元的第二转换单元730的输出端,第四电阻r4的第二端与采集芯片u2的第二输出端sda电连接。采集芯片u2的ain0、ain1、ain2和ain3引脚分别与调平单元200的输出端电连接,接收调平单元200的检测信号,采集芯片u2的第一输出端和第二输出端分别为采集芯片u2的scl引脚和sda引脚,scl引脚和sda引脚均与处理器单元300电连接,调平单元200的检测信号经采集芯片u2转换为数字信号后,即产生成型平台800的位置信息发送给处理器单元300,scl引脚和sda引脚还分别通过第三电阻r3和第四电阻r4连接供电单元的第二转换单元730的输出端,采集芯片u2的内置比较器输出端为采集芯片u2的alert/rdy引脚,alert/rdy引脚通过第二电阻r2连接供电单元的第二转换单元730的输出端,第二转换单元730提供3.3v电平,起到为采集芯片u2提供稳定的高电平,避免输出的模拟信号受到供电信号干扰的作用。采集芯片u2的供电引脚vdd连接供电单元的第二转换单元730的输出端,供电引脚vdd还连接有第三电容c3,第三电容c3用于滤波。采集芯片u2的地址引脚addr通过第二磁珠l4接地,第二磁珠l4起到抑制信号线、电源线上的高频噪声和尖峰干扰的作用。
78.一种实施方式中,如图8所示,调平电路400还包括分压电路440,分压电路440的数量与检测单元500的数量对应,分压电路440的第一端与检测单元500的输出端电连接,分压电路440的第二端与信号采集电路430的输入端电连接。分压电路440包括第五电阻r5和第四电容c4。第五电阻r5的第一端与检测单元500电连接,第五电阻r5的第二端与采集芯片u2的输入端ain0、ain1、ain2或ain3电连接,第四电容c4的第一端连接供电单元电连接,且第四电容c4的第一端与检测单元500的供电端电连接,第四电容c4的第二端接地。
79.针对每一个检测单元500中的检测器520均设置一个分压电路440,第五电阻r5的第一端与采集芯片u2的ain0ain1、ain2或ain3引脚电连接,检测器520的检测信号经过第五电阻r5后传输到采集芯片u2,检测器520为位移传感器时,检测器520的供电电压为3.3v,检测器520的供电端与供电单元的第二转换单元730的输出端电连接,检测器520的供电端还连接有第四电容c4,第四电容c4用于滤波。
80.一种实施方式中,如图1、5和图9所示,调平系统还包括连接单元600,连接单元600分别与处理器单元300和调平电路400电连接。连接单元600用于处理器单元300和调平电路400之间的数据传送。
81.连接单元600起到方便调平电路400和处理器单元300连接的作用,连接单元600包括第一连接器con1和第二连接器con2,第一连接器con1和第二连接器con2具体为插线板。con1分别与转换芯片u1的输入引脚a1、a2、a3和a4电连接,以将处理器单元300的控制信号传送给转换芯片u1,con2分别与采集芯片u2的scl引脚、sda引脚和alert/rdy引脚电连接,以接收采集芯片u2的位置信息。
82.一种实施方式中,如图1、图10-11所示,调平系统还包括供电单元,供电单元包括电源710、第一转换单元720和第二转换单元730,电源710与第一转换单元720电连接,第一转换单元720与调平电路400电连接,第二转换单元730分别与处理器单元300和调平电路400电连接。第一转换单元720和第二转换单元730用于转换以及为调平电路400供电。
83.第二转换单元730的输出端输出3.3v的电平,第一转换单元720的输出端输出5v的电平。电源710提供24v原始电压,第一转换单元720用于为舵机以及电路中需要5v电平的器件供电。在舵机的数量为四个的实施方式中,第一转换单元720可以为两个,每个第一转换单元720为两个舵机进行供电。第一转换单元720提供的电压稳定,避免供电对电路信号产生的干扰。第一转换单元720可以采用多种转换芯片实现,如采用高频降压开关调节器。
84.如图10所示,第一转换单元720包括第一电源芯片u3。第一转换单元720还包括第一二极管d1、第五电容c5、第六电容c6、第六电阻r6、第七电阻r7和第八电阻r8。第一二极管d1的阳极与电源710电连接,第一二极管d1的阴极与第一电源芯片u3的vin引脚电连接,第五电容c5的第一端与第一电源芯片u3的vin引脚电连接,第五电容c5的第二端接地,第六电容c6的第一端与第一电源芯片u3的vin引脚电连接,第六电容c6的第二端接地,第五电容c5和第六电容c6用于电源710供电电压的滤波。第一电源芯片u3的vin引脚还与第六电阻r6的第一端电连接,第六电阻r6的第二端与第一电源芯片u3的en引脚电连接,第一电源芯片u3的en引脚还与第七电阻r7的第一端电连接,第七电阻r7的第二端接地,第一电源芯片u3的freq引脚与地之间还连接有第八电阻r8。第一电源芯片u3的gnd引脚和pad引脚接地。
85.第一转换单元720还包括第二二极管d2和第七电容c7。第二二极管d2的第一端接地,第二二极管d2的第二端与第七电容c7的第一端电连接,第七电容c7的第一端还与第一电源芯片u3的sw引脚电连接,第七电容c7的第二端与第一电源芯片u3的bst引脚电连接。第二二极管d2为稳压二极管,第七电容c7为旁路电容器。
86.第一转换单元720还包括第八电容c8、第九电容c9和第九电阻r9。第八电容c8的第一端与第一电源芯片u3的comp引脚电连接,第八电容c8的第二端与第九电阻r9的第一端电连接,第九电阻r9的第二端接地,第九电容c9的两端分别与第一电源芯片u3的comp引脚和第九电阻r9的第二端电连接。第八电容c8、第九电容c9和第九电阻r9用于回路频率补偿。
87.第一转换单元720还包括第一电感l1、第十电阻r10、第十一电阻r11、第十电容c10、第十一电容c11、第三二极管d3、第四二极管d4和第十二电阻r12。第一电感l1的第一端与第一电源芯片u3的输出端sw引脚电连接,第十电阻r10的第一端与第一电感l1的第二端电连接,第十电阻r10的第二端分别与第一电源芯片u3的fb引脚和第十一电阻r11的第一端电连接,第十一电阻r11的第二端接地,第十电容c10的第一端和第十一电容c11的第一端分别与第一电感l1的第二端电连接,第十电容c10的第二端和第十一电容c11的第二端均接地,用于滤波。第三二极管d3的阴极与第一电感l1的第二端电连接,第三二极管d3的阳极接地,第十二电阻r12的第一端与第三二极管d3的阴极电连接,第十二电阻r12的第二端与第
四二极管d4的阳极电连接,第四二极管d4的阴极接地。第一电感l1采用15uh/3a电感,防止输出电压突变。第四二极管d4为发光二极管,用于指示工作状态。第十二电阻r12为0603电阻。
88.一种实施方式中,第三二极管d3的阴极与调平电路400电连接,第三二极管d3的阴极用于输出5v电平。具体的,第三二极管d3的阴极与舵机的供电端即第二电容c2电连接,为舵机提供5v供电。第三二极管d3的阴极还与转换芯片u1的vccb引脚电连接,起到为转换芯片u1提供稳定5v电平。
89.如图11所示,第二转换单元730包括第二电源芯片u4,第二转换单元730还包括第十三电阻r13、第十二电容c12、第十三电容c13、第十四电阻r14和第十四电容c14。第十三电阻r13的第一端连接供电电压,第十三电阻r13的第二端与第二电源芯片u4的供电端vin引脚电连接,第十二电容c12的第一端与vin引脚电连接电连接,第十二电容c12的第二端接地,第十三电容c13的第一端与vin引脚电连接,第十三电容c13的第二端接地,第十四电阻r14的第一端与vin引脚电连接,第十四电阻r14的第二端与第十四电容c14的第一端电连接,第十四电容c14的第二端接地,第十四电阻r14的第二端和第十四电容c14的第一端均与第二电源芯片u4的en端电连接。
90.第二转换单元730还包括第十五电容c15、第十六电容c16和第十七电容c17。第十五电容c15的第一端和第十六电容c16的第一端均与第二电源芯片u4的输出端out引脚电连接,第十五电容c15的第二端和第十六电容c16的第二端均接地。第十七电容c17的第一端与第二电源芯片u4的d=adj引脚电连接,第十七电容c17的第二端接地。第十二电容c12、第十三电容c13、第十四电容c14、第十五电容c15、第十六电容c16和第十七电容c17均用于滤波。
91.第二电源芯片u4的输出端out引脚与调平电路400电连接,用于输出3.3v电平。具体的,第二电源芯片u4的out引脚与转换芯片u1的vcca引脚电连接,起到为转换芯片u1提供稳定3.3v电平。采集芯片u2的scl引脚和sda引脚分别通过第三电阻r3和第四电阻r4连接第二电源芯片u4的out引脚,采集芯片u2的alert/rdy引脚通过第二电阻r2连接第二电源芯片u4的out引脚,第二电源芯片u4的out为采集芯片u2提供稳定的3.3v电平,避免scl引脚、sda引脚和alert/rdy引脚输出的模拟信号受到供电信号干扰。第二电源芯片u4的out引脚与检测器520的供电端电连接,为检测器520提供3.3v电平。
92.以下对一种实施方式的调平系统中调平单元200和检测单元500等的具体结构,以及调平过程进行描述:
93.如图2-4所示,调平单元200包括第一固定件210、驱动器220和第一活动件230。第一活动件230与第一固定件210活动连接,第一活动件230与支撑单元100连接,驱动器220分别与第一固定件210和第一活动件230连接,驱动器220与调平电路400电连接。处理器单元300用于控制驱动器220,以使驱动器220驱动第一活动件230相对第一固定件210移动,以进行支撑单元100的调平。驱动器220可以为上述舵机。
94.检测单元500包括第二固定件510、检测器520和第二活动件530。第二固定件510与第一活动件230连接,检测器520与第二固定件510连接,第二活动件530与第二固定件510活动连接,第二活动件530的第一端与检测器520相对,第二活动件530的第二端与成型平台800对应设置。调平电路400与检测器520电连接。第二活动件530用于在成型平台800的作用下移动,检测器520用于根据第二活动件530的位移量生成检测信号。
95.调平单元200和检测单元500相互固定,位于透光口110的外侧的不同侧,且与成型平台800的四角对应,实现由不同位置进行支撑单元100高度或倾斜角度的调整。检测器520为位移传感器和/或距离传感器,以检测器为位移传感器为例。第二固定件510与第一活动件230连接,使得检测单元500与第一活动件230连联动,即检测单元500跟随第一活动件230同步升降,使得检测单元500实时反映支撑单元100的实际高度。第二活动件530突出于支撑单元100的上表面,当成型平台800下降到预设高度时,第二活动件530将受到成型平台800的推动作用而向下移动,继而推动位移传感器的检测头动作,位移传感器把第二活动件530的竖直位移量转换为电压信号,即检测信号后,通过分压电路440和信号采集电路430将检测信号转化为位置信息,经过连接单元600传送给处理器单元300。将四个调平单元200对应的支撑单元100的四个点分别称为第一调平点、第二调平点、第三调平点和第四调平点,处理器单元300接收四个位移传感器对应的四组位置信息,其中位移传感器信号变化最大的一个调平点为所有调平点中的最高点,即与成型平台800距离最近的点,以下以第一调平点为最高点为例。处理器单元300发送调平信号,控制第二调平点第二调平点为有别于第一调平点的任一点对应的调平单元200的驱动器220运转,驱动第一活动件230上升,继而使得第二调平点上升,第一活动件230上升的同时,由于第二固定件510与第一活动件230连接,检测单元500跟随第一活动件230同步升降,使得第二活动件530同时上升,而成型平台800的位置不变,第二活动件530将在成型平台800的作用下产生新的位置信息,处理器单元300比较第二调平点新的位置信息与上一次位置信息的差值,当差值小于0.05毫米时,第二调平点调平完成,依上述调平过程依次进行第三调平点和第四调平点的调平,最后再进行第一调平点的调平,当所有调平点调平结束,可知支撑单元100的上表面与成型平台800的成形面贴合,调平完成。
96.另一方面,本发明实施例还提供一种增材制造设备,包括上述任一项的调平系统,以及打印机本体、光源组件、导向架组件和成型平台800,光源组件和成型平台800均与处理器单元300电连接,调平单元200与打印机本体连接,光源组件设置于打印机本体内,导向架组件设置于打印机本体上,成型平台800与导向架组件连接。
97.处理器单元300用于控制光源组件发出的光线投射到支撑单元100的透光口110上、控制成型平台800相对支撑单元100移动以进行3d打印,以及控制调平单元200对支撑单元100进行调平。
98.本发明的技术方案如下:
99.一方面,本发明实施例提供了一种调平系统,调平系统包括:
100.支撑单元100,支撑单元上用于设置树脂盒;
101.多个调平单元200,调平单元200与支撑单元100连接;
102.处理器单元300和调平电路400,处理器单元300与调平电路400电连接,调平电路400与调平单元200电连接,处理器单元300用于通过调平电路400控制调平单元200调整支撑单元100的倾斜角度和高度。
103.其中,调平电路400包括电平转换电路410;
104.电平转换电路410的输入端与处理器单元300电连接,电平转换电路410的输出端与调平单元200电连接,电平转换电路410的输出端的数量与调平单元200的数量对应;
105.电平转换电路410用于对处理器单元300发出的第一控制信号进行电平转换,生成
用于控制调平单元200的第二控制信号;
106.电平转换电路410包括转换芯片u1,调平系统还包括供电单元,转换芯片u1的电源端与供电单元电连接,转换芯片u1的输入端与处理器单元300电连接,转换芯片u1的输出端分别与多个调平单元200电连接,转换芯片u1的输出端的数量与调平单元200的数量对应;
107.转换芯片u1用于将第一控制信号转换为第二控制信号。
108.其中,调平电路400还包括多个驱动电路420,驱动电路420的数量与调平单元200的数量对应,驱动电路420的第一端与电平转换电路410的输出端电连接,驱动电路420的第二端与调平单元200电连接;
109.驱动电路420包括第一电阻r1、第一电容c1和第二电容c2;
110.第一电阻r1的第一端与电平转换电路410的输出端电连接,第一电阻r1的第二端与调平单元200电连接,第一电容c1的第一端与第一电阻r1的第二端电连接,第一电容c1的第二端接地,调平单元200的供电端分别与第二电容c2的第一端和供电单元电连接,第二电容c2的第二端接地;
111.第一电阻r1用于调平单元200的过流保护,第一电容c1和第二电容c2用于滤波。
112.其中,调平系统还包括多个检测单元500,检测单元500的数量与调平单元200的数量相同,检测单元500与调平单元200一一对应连接,检测单元相对增材制造设备的成型平台800设置,用于检测成型平台800的位置,并产生检测信号;
113.调平电路400还包括信号采集电路430,信号采集电路430的输入端的数量与检测单元500的数量对应,信号采集电路430的输入端与检测单元500电连接,信号采集电路430的输出端与处理器单元300电连接;
114.信号采集电路430用于根据检测信号输出成型平台800的位置信息,处理器单元300用于根据位置信息控制调平单元200调整支撑单元100的倾斜角度和高度;
115.信号采集电路430包括采集芯片u2、上拉电阻组件和第三电容c3;
116.采集芯片u2的输入端与检测单元500电连接,采集芯片u2的输出端与处理器单元300电连接,上拉电阻组件的第一端与供电单元电连接,上拉电阻组件的第二端与采集芯片u2的输出端电连接,第三电容c3的第一端与供电单元电连接,且第三电容c3的第一端与采集芯片u2的供电端电连接,第三电容c3的第二端接地;
117.采集芯片u2用于根据检测信号输出成型平台800的位置信息。
118.其中,调平电路400还包括分压电路440,分压电路440的数量与检测单元500的数量对应,分压电路440的第一端与检测单元500的输出端电连接,分压电路440的第二端与信号采集电路430的输入端电连接;
119.分压电路440包括第五电阻r5和第四电容c4;
120.第五电阻r5的第一端与检测单元500电连接,第五电阻r5的第二端与采集芯片u2的输入端电连接,第四电容c4的第一端与供电单元电连接,且第四电容c4的第一端与检测单元500的供电端电连接,第四电容c4的第二端接地。
121.其中,调平系统还包括连接单元600,连接单元600分别与处理器单元300和调平电路400电连接;
122.连接单元600用于处理器单元300和调平电路400之间的数据传送。
123.其中,调平系统还包括供电单元,供电单元包括电源710、第一转换单元720和第二
转换单元730,电源710与第一转换单元720电连接,第一转换单元720与调平电路400电连接,第二转换单元730分别与处理器单元300和调平电路400电连接;
124.第一转换单元720和第二转换单元730用于电平转换以及为调平电路400供电。
125.其中,调平单元200包括第一固定件210、驱动器220和第一活动件230;
126.第一活动件230与第一固定件210活动连接,第一活动件230与支撑单元100连接,驱动器220分别与第一固定件210和第一活动件230连接,驱动器220与调平电路400电连接;
127.处理器单元300用于控制驱动器220,以使驱动器220驱动第一活动件230相对第一固定件210移动,以进行支撑单元100的调平。
128.其中,检测单元500包括第二固定件510、检测器520和第二活动件530;
129.第二固定件510与支撑单元100连接,检测器520与第二固定件510连接,第二活动件530与第二固定件510活动连接,第二活动件530的第一端与检测器520相对,第二活动件530的第二端与成型平台800对应设置;
130.调平电路400与检测器520电连接;
131.第二活动件530用于在成型平台800的作用下移动,检测器520用于根据第二活动件530的位移量生成检测信号。
132.另一方面,本发明还提供一种增材制造设备,包括如上述任一项的调平系统,以及打印机本体、光源组件、导向架组件和成型平台800,光源组件和成型平台800均与处理器单元300电连接,调平单元200与打印机本体连接,光源组件设置于打印机本体内,导向架组件设置于打印机本体上,成型平台800与导向架组件连接;
133.处理器单元300用于控制光源组件发出的光线投射到支撑单元100的透光口110上、控制成型平台800相对支撑单元100移动以进行3d打印,以及控制调平单元200对支撑单元100进行调平。
134.以上,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1