一种注塑机用六轴机械手及其控制方法与流程
1.本发明涉及机械手技术领域,更具体地说,特别涉及一种注塑机用六轴机械手及其控制方法。
背景技术:
2.目前,在汽车零件生产的过程中,常见的是通过热塑成型模具与注塑机的相互配合将热塑性塑料或者热固性塑料一体成型制成各种指定类型的塑料制品,并且在汽车零件在生产完成后,再通过设置在注塑机上的机械手将生产完成的塑料制品从该注塑机中取出,由此完成汽车零件的生产。
3.然而,现有的注塑机用机械手常见的是采用三轴牛头臂机械手,其在与注塑机配套使用的过程中,通常仅适用于结构简单或者尺寸较小的汽车零件的夹取操作,对于结构复杂或者尺寸较大的汽车零件,例如:汽车踏板、汽车保险缸等,采用现有的三轴牛头臂机械手则较难将该类汽车零件从注塑机内部的有限模腔中取出,往往需要人工从注塑机的模腔中抓取汽车零件以完成一个周期的生产过程,不仅不能全流程自动完成汽车零件的生产,生产效率低,而且人工取件容易出现操作不当导致汽车零件损伤影响产品合格率的问题;另外,现有的三轴牛头臂机械手在使用的过程中,也缺乏对汽车零件的自动切水口以及去毛刺功能,在汽车零件生产完成后还需要人工额外进行切水口以及去毛刺操作,进一步降低了生产效率,难以满足实际的应用需求。
4.公开号cn207465802u的中国专利申请公开了一种具有六轴传动的注塑机机械手结构,其技术要点:包括安装基座,安装基座上设有六轴机械手装置,六轴机械手装置包括第一轴传动座、第二轴传动机构、第三轴传动机构、第四轴传动座、第五轴传动机构和第六轴传动机构,第一轴传动座和安装基座之间设有转盘旋转装置,第二轴传动机构上设有z轴伸缩装置和机械手大臂,第三轴传动机构上设有y轴转动摇杆和第一连接杆,第四轴传动座下方设有滚珠轴承,第五轴传动机构上设有x轴转动摇杆和第二连接杆,第二连接杆活动套接在x轴转动摇杆的一端,第六轴传动机构上设有感应器和可调节工件夹持装置。该方案虽然解决了能够适用于多类型汽车零件的夹取操作以实现全流程自动完成汽车零件的生产的问题,但是该方案并不能解决能够自动完成对汽车零件进行切水口以及去毛刺操作的问题。
5.因此,本发明提供一种新的技术方案来解决上述问题。
技术实现要素:
6.本发明的一个目的在于提供一种能够适用于多类型汽车零件的夹取操作以实现全流程自动完成汽车零件的生产、能够自动对汽车零件进行切水口以及去毛刺操作、在生产的过程中不易造成汽车零件损伤、有效提高生产效率以及产品合格率的注塑机用六轴机械手。
7.本发明的另一个目的在于提供一种采用上述注塑机用六轴机械手的控制方法。
8.为了达到上述目的,本发明采用的技术方案如下:
9.一方面,本发明提供一种注塑机用六轴机械手,包括设在外部的注塑机上的六轴机械手装置;所述六轴机械手装置包括设在所述注塑机顶部的基座,在所述基座上设有六轴机械手臂,在所述六轴机械手臂上远离所述基座的一端设有一用于与该六轴机械手臂相配合将生产的汽车零件从所述注塑机的模腔中取出的取件夹具;还包括设在所述注塑机的一侧壁上并且与所述六轴机械手臂、取件夹具电连接的集成控制柜,在所述注塑机的前端面上自左而右依次设有一分别与所述取件夹具配合用于对生产的汽车零件进行切水口以及去毛刺操作的水口刀结构和火焰处理结构。
10.优选地,所述六轴机械手臂包括与所述集成控制柜电连接的本体回转轴、主臂前后摆动轴、小臂前后摆动轴、手腕回转旋转轴、手腕上下摆动轴和末端旋转轴,其中,所述取件夹具是安装在所述末端旋转轴的末端。
11.优选地,所述本体回转轴安装在所述基座上用于左右旋转动作,所述主臂前后摆动轴安装在所述本体回转轴上远离所述基座的一端,所述小臂前后摆动轴安装在所述主臂前后摆动轴上远离所述本体回转轴的一端用于上下料摆动动作,手腕回转旋转轴安装在所述小臂前后摆动轴上远离所述主臂前后摆动轴的一端用于自由回转动作,所述手腕上下摆动轴安装在所述手腕回转旋转轴上远离所述小臂前后摆动轴的一端用于上下小幅度翻转动作,所述末端旋转轴安装在所述手腕上下摆动轴上远离所述手腕回转旋转轴的一端用于三百六十度旋转动作。
12.优选地,所述水口刀结构包括通过螺栓安装在所述注塑机上靠近所述集成控制柜的一侧下端的限位座,在所述限位座上活动套设有一能够相对该限位座三百六十度旋转调节用于与所述取件夹具相配合对生产的汽车零件进行切水口操作的水口刀,还在所述水口刀上与所述限位座相连接的一端设有一用于将该水口刀固定在所述限位座上的螺丝。
13.优选地,所述火焰处理结构包括通过螺栓安装在所述注塑机上远离所述集成控制柜的一侧下端的安装座,在所述安装座上通过一滚珠轴承设有转盘,在所述转盘上设有一能够随着该转盘三百六十度旋转调节的火焰燃烧组件,还在所述转盘上设有一用于将该转盘固定在所述安装座上的螺钉,其中,所述火焰燃烧组件通过导线与所述集成控制柜电连接。
14.优选地,所述火焰燃烧组件包括设在所述转盘上并且自带有燃料的火焰燃烧器,在所述火焰燃烧器的出口端通过一电动阀连接有火焰燃烧口,在所述火焰燃烧口上远离所述电动阀的一端设有电子点火器,其中,所述电动阀、电子点火器均通过导线与所述集成控制柜电连接。
15.优选地,所述取件夹具包括通过螺栓安装在所述末端旋转轴上远离所述手腕上下摆动轴一端的支撑座且该支撑座能够随着所述末端旋转轴三百六十度旋转,在所述支撑座上靠近所述末端旋转轴的一端设有取件气缸,还在所述支撑座上远离所述末端旋转轴的一端设有若干个均通过一连接管与所述取件气缸的输出端连接的真空吸盘,其中,所述取件夹具是通过所述取件气缸与所述集成控制柜电连接。
16.另一方面,本发明还提供一种采用所述的注塑机用六轴机械手的控制方法,该控制方法包括以下步骤:
17.s1、在集成控制柜收到注塑机完成汽车零件的生产信号后,由集成控制柜启动六
轴机械手装置的六轴机械手臂按照预设的运动轨迹动作将取件夹具送入注塑机的模腔内并紧贴在汽车零件上;
18.s2、通过集成控制柜启动取件夹具工作使该取件夹具真空吸附住汽车零件,再由集成控制柜启动六轴机械手装置的六轴机械手臂按照预设的运动轨迹动作将取件夹具连同汽车零件从注塑机的模腔内取出,同时,利用集成控制柜传输信号给注塑机使该注塑机合模进行下一个汽车零件的生产;
19.s3、由集成控制柜启动六轴机械手装置的六轴机械手臂按照预设的运动轨迹动作带动取件夹具连同汽车零件一起运行至水口刀结构处,并按照预设的运动轨迹运行与水口刀结构相配合进行切水口操作;
20.s4、汽车零件完成切水口操作后,再由集成控制柜启动六轴机械手装置的六轴机械手臂按照预设的运动轨迹动作带动取件夹具连同汽车零件一起运行至火焰处理结构处,同时,通过集成控制柜启动火焰处理结构工作产生火焰对该汽车零件进行去毛刺操作;
21.s5、汽车零件完成去毛刺操作后,通过集成控制柜停止火焰处理结构工作的同时,启动六轴机械手装置的六轴机械手臂工作带动取件夹具连同汽车零件一起按照预设的运动轨迹动作将该汽车零件摆放至外部的输送线上;
22.s6、最后,由集成控制柜启动六轴机械手装置的六轴机械手臂工作带动取件夹具按照预设的运动轨迹动作复位,等待信号进行下一个汽车零件的取件操作。
23.优选地,在步骤s3中,在对汽车零件进行切水口操作的过程中,汽车零件各个水口的切水口操作时间为2s。
24.与现有技术相比,本发明具有的有益效果如下:
25.本发明在生产汽车零件的过程中,采用六轴机械手装置替代三轴牛头臂机械手与注塑机配套使用,通过六轴机械手装置具备有六个自由度的运动功能使本发明能够适用于多类型汽车零件的夹取操作,能够替代人工手动上下料操作以实现全流程自动完成汽车零件的生产,不仅不易造成汽车零件损伤,而且能够有效提高产品的合格率,同时,本发明通过在注塑机上设有水口刀结构和火焰处理结构,在工作的过程中,利用带有水口刀结构和火焰处理结构的六轴机械手装置能够实现对汽车零件进行切水口以及去毛刺操作,能够进一步提高生产效率。
26.本发明具体使用时,在集成控制柜收到注塑机完成汽车零件的生产信号后,由集成控制柜启动六轴机械手装置的六轴机械手臂按照预设的运动轨迹动作将取件夹具送入注塑机的模腔内并紧贴在汽车零件上;通过集成控制柜启动取件夹具工作使该取件夹具真空吸附住汽车零件,再由集成控制柜启动六轴机械手装置的六轴机械手臂按照预设的运动轨迹动作将取件夹具连同汽车零件从注塑机的模腔内取出,同时,利用集成控制柜传输信号给注塑机使该注塑机合模进行下一个汽车零件的生产;由集成控制柜启动六轴机械手装置的六轴机械手臂按照预设的运动轨迹动作带动取件夹具连同汽车零件一起运行至水口刀结构处,并按照预设的运动轨迹运行与水口刀结构相配合进行切水口操作;汽车零件完成切水口操作后,再由集成控制柜启动六轴机械手装置的六轴机械手臂按照预设的运动轨迹动作带动取件夹具连同汽车零件一起运行至火焰处理结构处,同时,通过集成控制柜启动火焰处理结构工作产生火焰对该汽车零件进行去毛刺操作;汽车零件完成去毛刺操作后,通过集成控制柜停止火焰处理结构工作的同时,启动六轴机械手装置的六轴机械手臂
工作带动取件夹具连同汽车零件一起按照预设的运动轨迹动作将该汽车零件摆放至外部的输送线上;最后,由集成控制柜启动六轴机械手装置的六轴机械手臂工作带动取件夹具按照预设的运动轨迹动作复位,等待信号进行下一个汽车零件的取件操作。
27.因此,本发明具有能够适用于多类型汽车零件的夹取操作以实现全流程自动完成汽车零件的生产、能够自动对汽车零件进行切水口以及去毛刺操作、在生产的过程中不易造成汽车零件损伤、有效提高生产效率以及产品合格率的优点。
附图说明
28.下面结合附图和实施例对本发明作进一步说明。
29.图1是本发明所述的一种注塑机用六轴机械手的结构示意图;
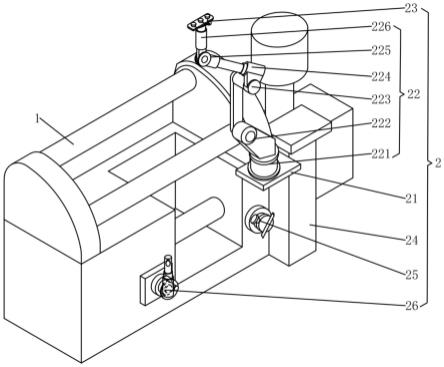
30.图2是本发明所述的一种注塑机用六轴机械手的六轴机械手装置的结构示意图;
31.图3是本发明所述的一种注塑机用六轴机械手的电路连接框图;
32.图4是本发明一种采用所述的注塑机用六轴机械手的控制方法的流程图。
33.附图标记说明:1、注塑机,2、六轴机械手装置,21、基座,22、六轴机械手臂,221、本体回转轴,222、主臂前后摆动轴,223、小臂前后摆动轴,224、手腕回转旋转轴,225、手腕上下摆动轴,226、末端旋转轴,23、取件夹具,231、支撑座,232、取件气缸,233、连接管,234、真空吸盘,24、集成控制柜,25、水口刀结构,251、限位座,252、水口刀,253、螺丝,26、火焰处理结构,261、安装座,262、滚珠轴承,263、转盘,264、火焰燃烧组件,100、火焰燃烧器,200、电动阀,300、火焰燃烧口,400、电子点火器,265、螺钉。
具体实施方式
34.参阅图1至图4所示,一种注塑机用六轴机械手,包括设在外部的注塑机1上的六轴机械手装置2;所述六轴机械手装置2包括设在所述注塑机1顶部的基座21,在所述基座21上设有六轴机械手臂22,在所述六轴机械手臂22上远离所述基座21的一端设有一用于与该六轴机械手臂22相配合将生产的汽车零件从所述注塑机1的模腔中取出的取件夹具23;还包括设在所述注塑机1的一侧壁上并且与所述六轴机械手臂22、取件夹具23电连接的集成控制柜24,在所述注塑机1的前端面上自左而右依次设有一分别与所述取件夹具23配合用于对生产的汽车零件进行切水口以及去毛刺操作的水口刀结构25和火焰处理结构26。在使用的过程中,在集成控制柜收到注塑机完成汽车零件的生产信号后,由集成控制柜启动六轴机械手装置的六轴机械手臂按照预设的运动轨迹动作将取件夹具送入注塑机的模腔内并紧贴在汽车零件上;通过集成控制柜启动取件夹具工作使该取件夹具真空吸附住汽车零件,再由集成控制柜启动六轴机械手装置的六轴机械手臂按照预设的运动轨迹动作将取件夹具连同汽车零件从注塑机的模腔内取出,同时,利用集成控制柜传输信号给注塑机使该注塑机合模进行下一个汽车零件的生产;由集成控制柜启动六轴机械手装置的六轴机械手臂按照预设的运动轨迹动作带动取件夹具连同汽车零件一起运行至水口刀结构处,并按照预设的运动轨迹运行与水口刀结构相配合进行切水口操作;汽车零件完成切水口操作后,再由集成控制柜启动六轴机械手装置的六轴机械手臂按照预设的运动轨迹动作带动取件夹具连同汽车零件一起运行至火焰处理结构处,同时,通过集成控制柜启动火焰处理结构工作产生火焰对该汽车零件进行去毛刺操作;汽车零件完成去毛刺操作后,通过集成控制
柜停止火焰处理结构工作的同时,启动六轴机械手装置的六轴机械手臂工作带动取件夹具连同汽车零件一起按照预设的运动轨迹动作将该汽车零件摆放至外部的输送线上;最后,由集成控制柜启动六轴机械手装置的六轴机械手臂工作带动取件夹具按照预设的运动轨迹动作复位,等待信号进行下一个汽车零件的取件操作。采用六轴机械手装置2替代三轴牛头臂机械手与注塑机1配套使用,通过六轴机械手装置2具备有六个自由度的运动功能能够适用于多类型汽车零件的夹取操作,能够替代人工手动上下料操作以实现全流程自动完成汽车零件的生产,不仅不易造成汽车零件损伤,而且能够有效提高产品的合格率,同时,通过在注塑机1上设有水口刀结构25和火焰处理结构26,在工作的过程中,利用带有水口刀结构25和火焰处理结构26的六轴机械手装置2能够实现对汽车零件进行切水口以及去毛刺操作,能够进一步提高生产效率。
35.在本实施例中,所述六轴机械手臂22包括与所述集成控制柜24电连接的本体回转轴221、主臂前后摆动轴222、小臂前后摆动轴223、手腕回转旋转轴224、手腕上下摆动轴225和末端旋转轴226,其中,所述取件夹具23是安装在所述末端旋转轴226的末端。所述本体回转轴221安装在所述基座21上用于左右旋转动作,所述主臂前后摆动轴222安装在所述本体回转轴221上远离所述基座21的一端,所述小臂前后摆动轴223安装在所述主臂前后摆动轴222上远离所述本体回转轴221的一端用于上下料摆动动作,手腕回转旋转轴224安装在所述小臂前后摆动轴223上远离所述主臂前后摆动轴222的一端用于自由回转动作,所述手腕上下摆动轴225安装在所述手腕回转旋转轴224上远离所述小臂前后摆动轴223的一端用于上下小幅度翻转动作,所述末端旋转轴226安装在所述手腕上下摆动轴225上远离所述手腕回转旋转轴224的一端用于三百六十度旋转动作。在使用的过程中,在集成控制柜24收到注塑机1完成汽车零件的生产信号后,由集成控制柜24启动六轴机械手臂22的本体回转轴221、主臂前后摆动轴222、小臂前后摆动轴223、手腕回转旋转轴224、手腕上下摆动轴225和末端旋转轴226按照预设的运动轨迹动作将取件夹具23送入注塑机1的模腔内并紧贴在汽车零件上;通过集成控制柜24启动取件夹具23工作使该取件夹具23真空吸附住汽车零件,再由集成控制柜24启动六轴机械手臂22的本体回转轴221、主臂前后摆动轴222、小臂前后摆动轴223、手腕回转旋转轴224、手腕上下摆动轴225和末端旋转轴226按照预设的运动轨迹动作将取件夹具23连同汽车零件从注塑机1的模腔内取出,同时,利用集成控制柜24传输信号给注塑机1使该注塑机合模进行下一个汽车零件的生产;由集成控制柜24启动六轴机械手臂22的本体回转轴221、主臂前后摆动轴222、小臂前后摆动轴223、手腕回转旋转轴224、手腕上下摆动轴225和末端旋转轴226按照预设的运动轨迹动作带动取件夹具23连同汽车零件一起运行至水口刀结构25处,并按照预设的运动轨迹运行与水口刀结构25相配合进行切水口操作;汽车零件完成切水口操作后,再由集成控制柜24启动六轴机械手臂22的本体回转轴221、主臂前后摆动轴222、小臂前后摆动轴223、手腕回转旋转轴224、手腕上下摆动轴225和末端旋转轴226按照预设的运动轨迹动作带动取件夹具23连同汽车零件一起运行至火焰处理结构26处,同时,通过集成控制柜24启动火焰处理结构26工作产生火焰对该汽车零件进行去毛刺操作;汽车零件完成去毛刺操作后,通过集成控制柜24停止火焰处理结构26工作的同时,启动六轴机械手臂22的本体回转轴221、主臂前后摆动轴222、小臂前后摆动轴223、手腕回转旋转轴224、手腕上下摆动轴225和末端旋转轴226带动取件夹具23连同汽车零件一起按照预设的运动轨迹动作将该汽车零件摆放至外部的输送线上;最后,
由集成控制柜24启动六轴机械手臂22的本体回转轴221、主臂前后摆动轴222、小臂前后摆动轴223、手腕回转旋转轴224、手腕上下摆动轴225和末端旋转轴226带动取件夹具23按照预设的运动轨迹动作复位,等待信号进行下一个汽车零件的取件操作。
36.在本实施例中,所述水口刀结构25包括通过螺栓安装在所述注塑机1上靠近所述集成控制柜24的一侧下端的限位座251,在所述限位座251上活动套设有一能够相对该限位座251三百六十度旋转调节用于与所述取件夹具23相配合对生产的汽车零件进行切水口操作的水口刀252,还在所述水口刀252上与所述限位座251相连接的一端设有一用于将该水口刀252固定在所述限位座251上的螺丝253。在使用的过程中,根据六轴机械手臂22带动取件夹具23连同汽车零件的预设运动轨迹,转动水口刀252相对限位座251旋转至适当位置使其能够与取件夹具23相适配对汽车零件进行切水口操作,再通过螺丝253将水口刀252固定在限位座251上,从而将该水口刀252限定在指定的使用位置,水口刀结构25采用限位座251结合水口刀252和螺丝253的结构设计,使水口刀252的刀口位置可调,能够适用于不同类型的汽车零件的切水口操作,提高了使用的适用性。
37.在本实施例中,所述火焰处理结构26包括通过螺栓安装在所述注塑机1上远离所述集成控制柜24的一侧下端的安装座261,在所述安装座261上通过一滚珠轴承262设有转盘263,在所述转盘263上设有一能够随着该转盘263三百六十度旋转调节的火焰燃烧组件264,还在所述转盘263上设有一用于将该转盘263固定在所述安装座261上的螺钉265,其中,所述火焰燃烧组件264通过导线与所述集成控制柜24电连接。所述火焰燃烧组件264包括设在所述转盘263上并且自带有燃料的火焰燃烧器100,在所述火焰燃烧器100的出口端通过一电动阀200连接有火焰燃烧口300,在所述火焰燃烧口300上远离所述电动阀200的一端设有电子点火器400,其中,所述电动阀200、电子点火器400均通过导线与所述集成控制柜24电连接。在使用的过程中,根据六轴机械手臂22带动取件夹具23连同汽车零件的预设运动轨迹,在滚珠轴承262的作用下转动转盘263带动火焰燃烧组件264旋转至适当位置使其能够与取件夹具23相适配对汽车零件进行去毛刺操作,再通过螺钉265将转盘263固定在安装座261上,从而将该火焰燃烧组件264限定在指定的使用位置以适用于不同类型的汽车零件的去毛刺操作,提高了使用的适用性。在去毛刺时,由集成控制柜24启动六轴机械手臂22的本体回转轴221、主臂前后摆动轴222、小臂前后摆动轴223、手腕回转旋转轴224、手腕上下摆动轴225和末端旋转轴226按照预设的运动轨迹动作带动取件夹具23连同汽车零件一起运行至火焰燃烧组件264的火焰燃烧口300处,同时,通过集成控制柜24启动电动阀200和电子点火器400工作,使火焰燃烧器100内的燃料依次经电动阀200、火焰燃烧口300输送至电子点火器400进行点燃,从而产生火焰对该汽车零件进行去毛刺操作。
38.在本实施例中,所述取件夹具23包括通过螺栓安装在所述末端旋转轴226上远离所述手腕上下摆动轴225一端的支撑座231且该支撑座231能够随着所述末端旋转轴226三百六十度旋转,在所述支撑座231上靠近所述末端旋转轴226的一端设有取件气缸232,还在所述支撑座231上远离所述末端旋转轴226的一端设有若干个均通过一连接管233与所述取件气缸232的输出端连接的真空吸盘234,其中,所述取件夹具23是通过所述取件气缸232与所述集成控制柜24电连接。在使用的过程中,由集成控制柜24启动取件气缸232工作,在连接管233的作用下将真空吸盘234与汽车零件的接触面抽成真空从而形成真空吸附状态吸附住汽车零件,有效提交汽车零件抓取的稳固性,以防止汽车零件掉落损伤。
39.在本实施例中,所述集成控制柜24为带有可编程控制器的集成控制柜。
40.本实施例具体使用时,首先,根据六轴机械手臂22带动取件夹具23连同汽车零件的预设运动轨迹,转动水口刀252相对限位座251旋转至适当位置使其能够与取件夹具23相适配对汽车零件进行切水口操作,再通过螺丝253将水口刀252固定在限位座251上,从而将该水口刀252限定在指定的使用位置,在滚珠轴承262的作用下转动转盘263带动火焰燃烧组件264旋转至适当位置使其能够与取件夹具23相适配对汽车零件进行去毛刺操作,再通过螺钉265将转盘263固定在安装座261上,从而将该火焰燃烧组件264限定在指定的使用位置;其次,在集成控制柜24收到注塑机1完成汽车零件的生产信号后,由集成控制柜24启动六轴机械手臂22的本体回转轴221、主臂前后摆动轴222、小臂前后摆动轴223、手腕回转旋转轴224、手腕上下摆动轴225和末端旋转轴226按照预设的运动轨迹动作将取件夹具23送入注塑机1的模腔内,此时,取件夹具23的真空吸盘234紧贴在汽车零件上,通过集成控制柜24启动启动取件气缸232工作,在连接管233的作用下将真空吸盘234与汽车零件的接触面抽成真空从而形成真空吸附状态吸附住汽车零件,再由集成控制柜24启动六轴机械手臂22的本体回转轴221、主臂前后摆动轴222、小臂前后摆动轴223、手腕回转旋转轴224、手腕上下摆动轴225和末端旋转轴226按照预设的运动轨迹动作将取件夹具23连同汽车零件从注塑机1的模腔内取出,同时,利用集成控制柜24传输信号给注塑机1使该注塑机合模进行下一个汽车零件的生产;然后,由集成控制柜24启动六轴机械手臂22的本体回转轴221、主臂前后摆动轴222、小臂前后摆动轴223、手腕回转旋转轴224、手腕上下摆动轴225和末端旋转轴226按照预设的运动轨迹动作带动取件夹具23连同汽车零件一起运行至水口刀252处,并按照预设的运动轨迹运行与水口刀252相配合进行切水口操作,汽车零件完成切水口操作后,再由集成控制柜24启动六轴机械手臂22的本体回转轴221、主臂前后摆动轴222、小臂前后摆动轴223、手腕回转旋转轴224、手腕上下摆动轴225和末端旋转轴226按照预设的运动轨迹动作带动取件夹具23连同汽车零件一起运行至火焰燃烧组件264的火焰燃烧口300处,同时,通过集成控制柜24启动电动阀200和电子点火器400工作,使火焰燃烧器100内的燃料依次经电动阀200、火焰燃烧口300输送至电子点火器400进行点燃,从而产生火焰对该汽车零件进行去毛刺操作;最后,汽车零件完成去毛刺操作后,通过集成控制柜24停止电动阀200和电子点火器400工作的同时,启动六轴机械手臂22的本体回转轴221、主臂前后摆动轴222、小臂前后摆动轴223、手腕回转旋转轴224、手腕上下摆动轴225和末端旋转轴226带动取件夹具23连同汽车零件一起按照预设的运动轨迹动作将该汽车零件摆放至外部的输送线上,由集成控制柜24停止取件气缸232工作即可使真空吸盘234与汽车零件的接触面不再处于真空吸附状态,从而将汽车零件脱落在外部的输送线上,再通过集成控制柜24启动六轴机械手臂22的本体回转轴221、主臂前后摆动轴222、小臂前后摆动轴223、手腕回转旋转轴224、手腕上下摆动轴225和末端旋转轴226带动取件夹具23按照预设的运动轨迹动作复位,等待信号进行下一个汽车零件的取件操作。
41.总之,本发明采用上述结构,具有能够适用于多类型汽车零件的夹取操作以实现全流程自动完成汽车零件的生产、能够自动对汽车零件进行切水口以及去毛刺操作、在生产的过程中不易造成汽车零件损伤、有效提高生产效率以及产品合格率的优点。
42.一种注塑机用六轴机械手的控制方法,该控制方法具体步骤如下:
43.s1、在集成控制柜24收到注塑机1完成汽车零件的生产信号后,由集成控制柜24启
动六轴机械手装置2的六轴机械手臂22按照预设的运动轨迹动作将取件夹具23送入注塑机1的模腔内并紧贴在汽车零件上;
44.s2、通过集成控制柜24启动取件夹具23工作使该取件夹具23真空吸附住汽车零件,再由集成控制柜24启动六轴机械手装置2的六轴机械手臂22按照预设的运动轨迹动作将取件夹具23连同汽车零件从注塑机1的模腔内取出,同时,利用集成控制柜24传输信号给注塑机1使该注塑机合模进行下一个汽车零件的生产;
45.s3、由集成控制柜24启动六轴机械手装置2的六轴机械手臂22按照预设的运动轨迹动作带动取件夹具23连同汽车零件一起运行至水口刀结构25处,并按照预设的运动轨迹运行与水口刀结构25相配合进行切水口操作;
46.s4、汽车零件完成切水口操作后,再由集成控制柜24启动六轴机械手装置2的六轴机械手臂22按照预设的运动轨迹动作带动取件夹具23连同汽车零件一起运行至火焰处理结构26处,同时,通过集成控制柜24启动火焰处理结构26工作产生火焰对该汽车零件进行去毛刺操作;
47.s5、汽车零件完成去毛刺操作后,通过集成控制柜24停止火焰处理结构26工作的同时,启动六轴机械手装置2的六轴机械手臂22工作带动取件夹具23连同汽车零件一起按照预设的运动轨迹动作将该汽车零件摆放至外部的输送线上;
48.s6、最后,由集成控制柜24启动六轴机械手装置2的六轴机械手臂22工作带动取件夹具23按照预设的运动轨迹动作复位,等待信号进行下一个汽车零件的取件操作。
49.在本实施例中,在步骤s3中,在对汽车零件进行切水口操作的过程中,汽车零件各个水口的切水口操作时间为2s。
50.对于本领域的技术人员来说,可根据以上描述的技术方案以及构思,做出其它各种相应的改变以及形变,而所有的这些改变以及形变都应该属于本发明权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1