一种双天线结构的电感耦合等离子体微型推进器
1.本发明属于等离子体推进技术领域,具体涉及一种双天线结构的电感耦合等离子体微型推进器。
背景技术:
2.目前,随着各类卫星发射数量的逐年增加以及卫星的工作模式由单体式工作向组队编网工作模式进行转变,发射的卫星逐渐趋于小型化(立方卫星)和微型化(纳米卫星),同时对应用在小卫星上的电推进技术也将面临推进器的性能优化、小体积、长使用寿命、低经济成本等一系列挑战。自20世纪60年代以来,电推进一直被卫星运营商用于空间站维护和轨道改造。当前的电推进装置主要分为三类:静电式、电磁式和电热式。其中静电式的推进器主要为栅格离子推进器,电磁式推进器主要为霍尔推进器,电热式推进器主要为电阻和电弧推进器。前两者推进器的系统比较复杂,且通常应用在千瓦级高功率、能够提供足够推进剂的大型卫星。近年来,在立方卫星方面提出了1u、1.5u、2u、3u型的小型卫星结构,其质量在1.33kg~4.00kg。截止2022年6月1日,在线的纳米卫星数据库显示已有超过3500个纳米卫星和立方卫星进入轨道,且3u以下的立方卫星近年来在发射的微型卫星中的占比越来越大;但是数据显示绝大部分的微型卫星都未装备推进系统。由于微型卫星的形状因素、尺寸限制和有效载荷平均功率,将对推进器提出体积小、重量轻、低功率、结构简单等要求,导致为其设计推进器的难度大幅增加。
3.因此,必须研究适合于微型卫星轨道保持、轨道机动与姿态控制的高集成度、低功耗、小推力和微冲量的微型推进系统,即需要一种微型推进器。
4.近年来,应用在立方卫星和纳米卫星上微推进系统被提出,且当前已有许多的等离子体推进系统已经在地面和空间进行实验研究。如霍尔推进器和离子推进器近些年发展迅速,但是它们都属于电磁式推进,喷出的均为离子射流,需要阴极电子进行中和保持电中性,且它们的推进装置均需要磁铁产生磁场来约束等离子体,导致装置比较复杂。目前有一种通过电感耦合放电的等离子体推进器,属于电热式微推进,其空间尺寸和总体质量都非常适用于微型卫星推进,冲量脉冲非常低,可实现微牛到毫牛量级的推力,平均功耗仅10-100w,非常适合配备微型卫星用于高精度姿态控制和相对轨道位置保持。
技术实现要素:
5.为了解决现有技术所存在的不足,本发明提供了一种双天线结构的电感耦合等离子体微型推进器,其结构简单,空间尺寸和质量较小,且只需要在低功率和低进气量下即可稳定工作,实现微牛到毫牛级推力。适合配备于当前发射的星座微小卫星中大部分未配备推进系统的纳米卫星和立方卫星。
6.为达到上述目的,本发明采用的技术方案如下:
7.一种双天线结构的电感耦合等离子体微型推进器,包括放电系统和接地,阻抗匹配器;
8.所述放电系统包括气源、进气阀、串联式天线、放电管以及射频电源;
9.所述气源与放电管直接相连,由进气阀控制;
10.所述串联式天线与阻抗匹配器相接,并绕制放电管表面,用于激发等离子体,并加热从气源进入放电管里面的气体;
11.所述阻抗匹配器与射频电源输出端相接;
12.所述接地与串联式天线和射频电源分别相接,用于组成完整的电路回路;
13.所述射频电源的频率为13.56mhz;
14.将两根相同天线串联连接形成串联式天线,并绕制在同一根放电管上用于所述放电系统,激发出更高的等离子体参数,产生推力;
15.所述等离子体参数包括等离子体密度和电子温度;
16.所述推力为所述电感耦合等离子体微型推进器通过等离子体加热气体后产生的推力。
17.进一步地,所述气源一端通入气体,另一端与放电管相连,所述气体为空气、氮气或惰性气体。
18.进一步地,所述放电管使用石英管或氧化铝陶瓷管。
19.进一步地,所述串联式天线包括电容耦合天线,电感耦合天线,感-容耦合天线或螺旋波天线。
20.进一步地,所述串联式天线使用铜或钨。
21.进一步地,所述串联式天线将两根形状、尺寸和材料均完全相同的天线以串联的方式接入到所述放电系统的电路中。
22.进一步地,据权利要求1所述的一种双天线结构的电感耦合等离子体微型推进器,其特征在于:所述放电管使用耐高温的绝缘材料管。
23.进一步地,所述气体为氩气、氦气或氙气。
24.在双天线结构的电感耦合等离子体微型推进器中,天线为两根多匝射频单环天线串联,间距为4cm;其他天线类型,可采用电容耦合天线,电感耦合天线,感-容耦合天线或螺旋波天线;其他天线间距,采用2cm,6cm或8cm。
25.有益效果:
26.本发明的双天线结构的电感耦合等离子体微型推进器空间尺寸和总体质量都非常小,在一个实施例中,其尺寸为100
×
16
×
16(单位:mm)。
27.所述双天线结构的电感耦合等离子体微型推进系统,与化学推进系统相比,不会产生堵塞,可使用小尺寸喷嘴喉道,实现微小推力;与电磁式的微型电推进系统相比,结构更加简单,可靠性更高;且与单天线的电感耦合等离子体推进器相比,拥有更高的等离子体参数和能够形成超声速的离子束,从而对推进剂的利用率更高。在用于精确控制微型卫星姿态和轨道位置时,此微型推进器产生的推力更加精确。另外,电推进具有高比冲和小推力的优势,但传统电推进器需要大量电功率(1-2kw),所述双天线结构的电感耦合等离子体微型推进器功耗低,在一个实施例中,平均功耗仅10-100w,可实现微牛到毫牛量级的推力,非常适合用于功率有限的微型卫星实现高精度姿态控制和相对轨道位置保持。
附图说明
28.为了更清楚地说明本发明的技术方案,下面对一个实例中附图作简要介绍。
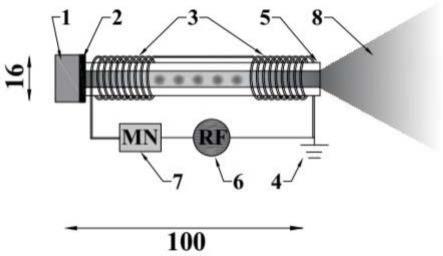
29.图1为一个多匝射频单环双天线结构的电感耦合等离子体推进系统示意图(单位:mm)。
30.图1中:1-气源,2-进气阀,3-串联式天线,4-接地,5-放电管,6-射频电源,7-阻抗匹配器,8-等离子体射流。
31.图2为双天线结构的电感耦合等离子体推进器推力直接测量方法示意图;其中(a)为点火时推进器静止悬挂的位置,(b)为点火后推进器的位置变化。
32.图2中:9-真空仓壁,10-激光位移传感器,11-悬挂装置。
具体实施方式
33.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。。
34.如图1所示,本发明的双天线结构的电感耦合等离子体微型推进器包括放电系统和接地4,阻抗匹配器7。所述放电系统包括气源1、进气阀2、串联式天线3、放电管5以及射频电源6。所述气源1与放电管5直接相连,由进气阀2控制;所述串联式天线3与阻抗匹配器7相接,并绕制放电管5表面,用于激发等离子体,并加热从气源1进入放电管5里面的气体;
35.所述阻抗匹配器7与射频电源6输出端相接;所述接地4与串联式天线3和射频电源6分别相接,用于组成完整的电路回路。
36.将两根相同天线串联连接形成串联式天线3,并绕制在同一根放电管5上形成电感耦合等离子体的放电系统,所述放电系统作为微型推进器的一个子系统,能够激发出更高的等离子体参数,所以产生更大推力。所述放电系统为决定推力大小的主要因素,本发明主要是通过提高所述放电系统的等离子体参数,从而提高微型推进器的推力。
37.所述射频电源6的频率为13.56mhz。
38.所述气源1一端通入气体,另一端与放电管5相连,使用气体可以为空气、氮气或惰性气体,惰性气体一般为氩气、氦气和氙气;控制放电管及真空室内气压为6.1
×
10-1
pa。
39.所述放电管5使用石英管、氧化铝陶瓷管或其他耐高温的绝缘材料管。
40.所述串联式天线3使用铜、钨或其他金属材料。
41.采用两根多匝射频单环天线且间距为4cm的形成串联式天线的双天线结构。
42.将串联式天线3绕设在放电管5表面,所述串联式天线3可使用电容耦合天线、电感耦合天线、感-容耦合天线、螺旋波天线等常见等离子体激发天线。
43.采用进气阀2控制放电管5内的进气量。
44.将微型推进器置于真空仓内,抽真空使气压到指定值4.4
×
10-4
pa。
45.优选的,如图1所示,本发明的双天线结构的电感耦合等离子体微型推进器空间尺寸和总体质量都非常小,在一个实施例中,其尺寸为100
×
16
×
16(单位:mm)。
46.打开射频电源6调整功率大小,并调节阻抗匹配器7将反射功率调至0,将功率控制在10-100w,在放电管5内激发产生等离子体,其中离子与中性气体电荷交换碰撞产生热量
加热中性气体,中性气体膨胀向另一端喷出等离子体射流8,产生推力。其中等离子体射流8非等离子体推力器的组成部件,其由放电产生的等离子体中的离子与中性气体通过电荷交换碰撞产生热量,加热中性气体向另一端喷出而产生。
47.通过激光位移传感器测量双天线结构的电感耦合等离子体微型推进器与真空仓壁的距离变化,可直接测量出推力,使其实现对微型卫星的精确位置调整。
48.下面结合图2具体说明本发明的双天线结构电感耦合等离子体微型推进器应用于微型卫星高精度位置调整时实现位移变化的控制模型。
49.在实现精确位置调整时,将微型推进器安装在带有激光位移传感器10的悬挂装置11上,此悬挂装置11安装在真空仓壁9上,使激光位移传感器10照射在真空仓壁9上时示数保持不变,然后对此激光位移传感器进行推力与位移标定,结果为aμn/μm。利用激光位移传感器10的示数改变,确定悬挂装置11的位移变化。其中图2中的(a)为微型推进器静止悬挂在悬挂装置11上,此时的激光位移传感器10示数为l1。图2中的(b)为微型推进器点火后悬挂装置11的位置变化,整个悬挂装置11向着等离子体射流相反的方向前进,此时的激光位移传感器10示数减小为l2。此时可测得此微型推进器产生的推力f,利用关系:
50.f=a
×
(l1-l2)
51.其中,a为图2中激光位移传感器的位移与推进器的推力的标定结果,单位为μn/μm。
52.即可确定微型推进器功率与推力之间的对应关系,最终建立精确推力控制模型。
53.以上所述的具体实施例,对本发明的技术方案进行了进一步的详细说明,凡在本发明的精神和原则之内,所做的任何修改,替换,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1