一种起动机预啮合系统的制作方法
1.本实用新型涉及车辆启停技术领域,特别涉及一种起动机预啮合系统。
背景技术:
2.近年来,作为汽车的耗油量改善方法,装设有启停功能的汽车在增加。在采用起动机启停后再启动结构的情况下,由于起动机的使用次数增加,因此,需提高起动机的耐久性。
3.传统起动机基于啮合部分的动铁芯和主触点部分的动铁芯,啮合部分和主触点部分几乎是同时动作的,啮合部分带动起动机单向器推进发动机飞轮和主触点部分接通蓄电池和起动机。传统的起动机起动方式在每次起动时,都会有单向器齿轮重新啮合进飞轮的过程,因此会产生机械噪音和振动,使得驾乘人员不舒服,同时也导致齿轮磨损,寿命不长,并且啮合反应速度慢。
技术实现要素:
4.本实用新型的目的旨在提供一种起动机预啮合系统,用以解决现有技术中起动时间长,起动噪音大,使用寿命低的问题。
5.本实用新型的上述技术目的是通过以下技术方案得以实现的:一种起动机预啮合系统,包括发动机、监控模块以及起动机,所述起动机包括控制模块、导通模块以及驱动模块,所述监控模块与所述控制模块电连接,所述控制模块与所述导通模块电连接,所述导通模块与所述驱动模块电连接;
6.所述监控模块,用于采集起动机电压以及发动机转速,并将所述起动机电压、所述发动机转速以及起动信号传递至所述控制模块;
7.所述控制模块,用于根据所述起动机电压、所述发动机转速以及所述起动信号,控制所述导通模块导通;
8.所述驱动模块,用于根据所述导通模块的导通状态与所述发动机预啮合。
9.本实用新型的进一步设置为:所述监控模块包括ecu单元、速度传感器以及电压传感器,所述ecu单元用于管理所述发动机的运行状态,所述速度传感器用于采集发动机飞轮的转速,所述电压传感器用于采集起动机b+端电压。
10.本实用新型的进一步设置为:所述驱动模块为电动机,所述电动机连接有驱动齿轮。
11.本实用新型的进一步设置为:所述导通模块包括触点开关和电磁螺线管,所述触点开关和所述电磁螺线管均与所述控制模块连接,所述触点开关与所述电动机的电枢电连接,所述电磁螺线管通过拨叉连接啮合弹簧,所述啮合弹簧与所述驱动齿轮连接,所述驱动齿轮与发动机飞轮啮合。
12.本实用新型的进一步设置为:所述触点开关为触点继电器。
13.本实用新型的有益效果是:本实用新型的起动机预啮合系统,通过监控模块采集
发动机转速以及起动机电压,并将发动机转速以及起动机电压发送给控制模块,控制模块根据发动机转速大小、起动机电压大小以及起动信号出现的时间,对车辆启停的所有情况实现预啮合控制,在发动机停机滑行期间,无论是否有起动请求,都通过给电磁螺线管通电,将起动机驱动齿轮伸进发动机飞轮,完成预啮合动作,为下次起动做准备,从而减少每次起动时产生的机械噪音和振动,有利于提高啮合响应速度,降低啮合噪音,提高起动机驱动齿轮的使用寿命。
附图说明
14.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
15.图1是本实用新型一种起动机预啮合系统的模块框图;
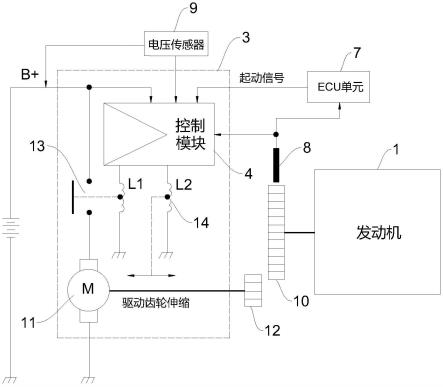
16.图2是本实用新型一种起动机预啮合系统的电路连接示意图。
17.图中,1、发动机;2、监控模块;3、起动机;4、控制模块;5、导通模块;6、驱动模块;7、ecu单元;8、速度传感器;9、电压传感器;10、发动机飞轮;11、电动机;12、驱动齿轮;13、触点开关;14、电磁螺线管。
具体实施方式
18.下面将结合具体实施例对本实用新型的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
19.参见图1,一种起动机3预啮合系统,包括发动机1、监控模块2以及起动机3,起动机3包括控制模块4、导通模块5以及驱动模块6,监控模块2与控制模块4电连接,控制模块4与导通模块5电连接,导通模块5与驱动模块6电连接;监控模块2用于采集起动机3电压以及发动机1转速,并将起动机3电压、发动机1转速以及起动信号传递至控制模块4;控制模块4用于根据起动机3电压、发动机1转速以及起动信号,控制导通模块5导通;驱动模块6用于根据导通模块5的导通状态与发动机1预啮合。与现有技术相比,本实施例提供的起动机3预啮合系统,通过监控模块2采集发动机1转速以及起动机3电压,并将发动机1转速以及起动机3电压发送给控制模块4,控制模块4根据发动机1转速大小、起动机3电压大小以及起动信号出现的时间,可以分成多种不同情况下的起动机3预啮合控制方案,从而对于车辆启停的所有情况实现预啮合控制,提高了啮合响应速度,降低了啮合噪音,提高了使用寿命。
20.参见图2,监控模块2包括ecu单元7、速度传感器8以及电压传感器9,ecu单元7为发动机1的运行管理单元,用于管理发动机1的运行状态,速度传感器8用于采集发动机飞轮10的转速,电压传感器9用于采集起动机3b+端电压。起动机3的控制模块4里含有单片机mcu、信号处理单元、功率开关管等电子元器件。驱动模块6为电动机11,电动机11连接有驱动齿轮12。导通模块5包括触点开关13和电磁螺线管14,触点开关13和电磁螺线管14均与控制模块4连接,触点开关13与电动机11的电枢电连接,电磁螺线管14通过拨叉连接啮合弹簧,啮
合弹簧与驱动齿轮12连接,驱动齿轮12与发动机飞轮10啮合。需要说明的是,电动机11受触点开关13和电磁螺线管14的控制,给电磁螺线管14通电,就是让驱动齿轮12伸出与发动机飞轮10啮合,将电磁螺线管14断电就缩回,退出啮合状态;给触点开关13通电,就是让电枢通电旋转,断电后电枢停止旋转。本实施例中的触点开关13为触点继电器。
21.具体的,控制模块4接收起动信号,并根据起动机3电压以及发动机1转速,使驱动模块6与发动机1预啮合,可以分成多种不同情况下的起动机3预啮合方案,对于车辆的所有情况实现预啮合控制,具体包括:
22.当起动机3在发动机1减速且发动机1转速大于等于300rpm时接收到起动信号,在发动机1转速等于300rpm时,同时导通触点开关13和驱动电磁螺线管14,驱动模块6与发动机1预啮合;
23.当发动机1转速降低至300rpm时,驱动电磁螺线管14,若起动机3在发动机1转速大于等于10rpm时接收到起动信号,则导通触点开关13,驱动模块6与发动机1预啮合。
24.需要说明的是,在发动机1停机滑行期间,无论是否有起动请求,都通过给电磁螺线管14通电,将起动机3驱动齿轮12伸进发动机飞轮10,完成预啮合动作,为下次起动做准备,从而减少每次起动时产生的机械噪音和振动。并且使驱动齿轮12和发动机飞轮10维持啮合状态10~30s,此期间用斩波方式降低电磁螺线管14线圈电流,比如维持20%,利用齿圈的惯性滑行过程,将驱动齿轮12推送至齿圈端面然后靠啮合弹簧压入齿圈里,起动机3电枢并不需要通电。
25.进一步地,当发动机1转速降低至300rpm时进行计时,在0.5~1s内,以第一电压驱动电磁螺线管14,在1~30s内,以第二电压驱动电磁螺线管14,其中第一电压为监测到的起动机3b+端电压,第二电压为监测到的起动机3b+端电压的20%,在1~30s内,以第二电压驱动电磁螺线管14,可以减少线圈发热,同时降低损耗。
26.进一步地,在发动机1静止状态时,监控模块2监测起动机3电压以及发动机1转速,当起动机3电压以及发动机1转速满足静止条件(发动机1转速为0,起动机3电压为12~12.5v)超过1min时,控制模块4进入静默状态,此时控制模块4只接收信号,不发出信号。当控制模块4接收到起动信号后,控制模块4将被唤醒,退出静默状态,并重新监测起动机3电压以及发动机1转速,此时当监测的起动机3电压以及发动机1转速仍满足静止条件时,才驱动电磁螺线管14,然后延迟30ms导通触点开关13,驱动模块6与发动机1预啮合。
27.使发动机1启动成功后,需要停止啮合,停止啮合也是通过发动机1转速以及起动机3电压进行判断,当检测到发动机1转速超过500rpm且维持超过200ms,并且发动机1转速持续上升时即可切断起动机3,或者当起动机3电压上升到13v且维持超过200ms,也可切断起动机3电源。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1