风力发电机组单桨叶卡死的极限降载控制方法及系统与流程
本发明涉及风力发电的,尤其是指一种风力发电机组单桨叶卡死的极限降载控制方法、系统、存储介质及计算设备。
背景技术:
1、目前,风力发电机组整体向大功率、高塔架、长叶片设计制造方向发展,风电竞价上网和平价上网背景下,降低度电成本成为当前和未来风电发展的迫切需求和关键因素。根据iec标准,叶片卡桨是风力发电机组在设计载荷计算阶段需要考虑的一种故障工况。当某一只叶片出现卡桨情况而无法进行正常变桨动作时,机组会对非卡桨叶片进行变桨控制以实现其顺桨停机。如果机组仍然带故障运行,则在风速突然增大的情况下机组会面临超速风险,同时三只叶片的气动不平衡载荷也会对机组的运行寿命产生巨大影响。但随着叶片长度不断增加,功率不断升高,若机组在卡桨故障发生后仍然采用传统的收桨停机策略,仅依靠降低变桨速率来降低停机过程中的极限载荷已无法满足整机设计的载荷要求。在高转速下,直接且连续的收桨动作反而会加剧三只叶片的气动不平衡载荷,导致轮毂、偏航部件承受较大的极限载荷,这将大大增加机组部件的成本。因此,需要开发一种适用于风力发电机组卡桨工况下的极限载荷降载方法,以降低机组各部件的极限载荷,从而降低机组的设计成本。
2、现有的卡桨工况载荷控制技术中,有在停机过程中根据叶轮方位角和机舱左右方向加速度测量值来进行变速率收桨停机控制,但是在卡桨条件下叶片的不平衡载荷本来就较大,频繁切换变桨速率可能会加剧叶片的气动不平衡载荷,同时,无论采用什么变桨速率,只要有直接连续的顺桨动作都会引起叶片之间气动不平衡载荷的变化,不能完全实现降载的目标。另外,桨叶角度、叶轮方位角和机舱左右方向加速度共同决定了最终输出的变桨速率值,那么多个输入变量的实时性和准确性也是值得考虑的问题。
3、现有的卡桨工况载荷控制技术中,有在卡桨故障触发后,机组在停机过程中将发电机扭矩提高至额定扭矩的1.6倍,该控制方式对变流器要求较高,需要变流器拥有在低转速甚至并网转速下承受较大扭矩甚至大于额定扭矩的能力,这在一定程度上会增加变流器成本,同时这对变流器的使用寿命也会造成一定影响。
技术实现思路
1、本发明的第一目的在于克服现有技术的缺点与不足,提供一种安全可靠的风力发电机组单桨叶卡死的极限降载控制方法,在故障触发后不立即执行收桨停机,而是先降低转速设定值,在转速较低的情况下再收桨停机,从而降低了由于高转速下直接执行收桨动作所加剧的不平衡载荷,进一步降低了机组各部件的极限载荷,并且在停机过程中的转矩设定值是在变流器所能承受的范围内给定的,不会增加变流器成本,也能保证变流器的安全运行,从而提高机组的安全性,降低机组的设计成本。
2、本发明的第二目的在于提供一种风力发电机组单桨叶卡死的极限降载控制系统。
3、本发明的第三目的在于提供一种存储介质。
4、本发明的第四目的在于提供一种计算设备。
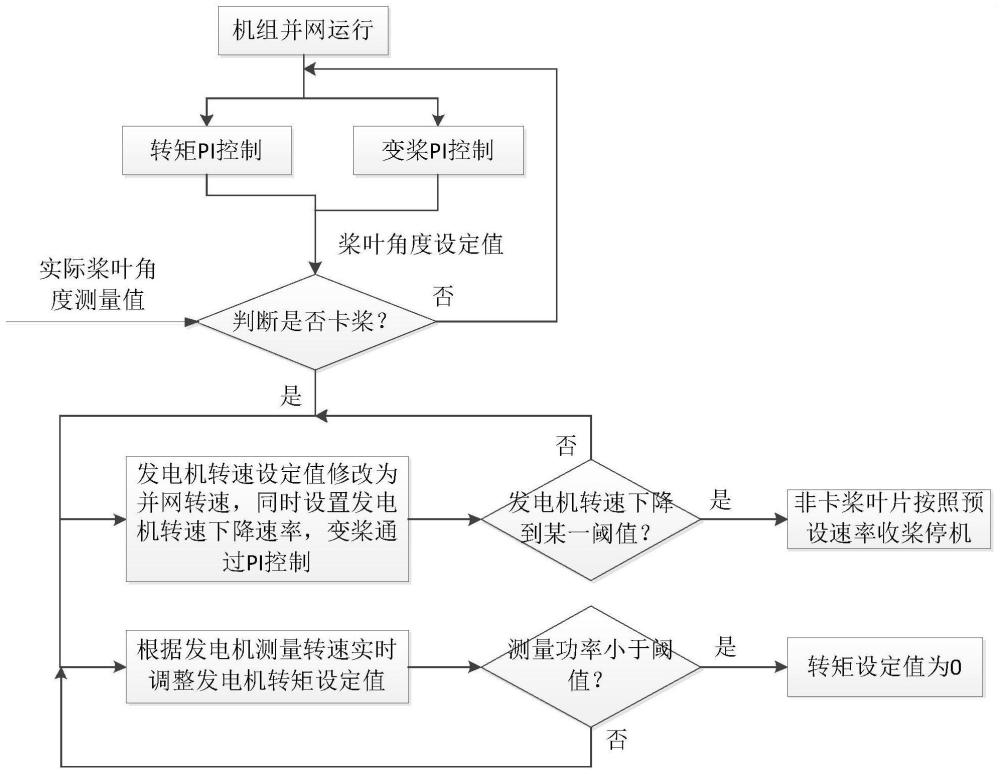
5、本发明的第一目的通过下述技术方案实现:风力发电机组单桨叶卡死的极限降载控制方法,当单叶片的桨叶角度设定值与实际桨叶角度测量值偏差大于某一阈值且该叶片的变桨速率小于某一阈值时,触发单叶片卡桨故障,进入卡桨停机模式,在停机过程中,首先降低发电机转速设定值,使发电机转速按照预设速率下降,此时叶片通过变桨pi控制,同时对发电机转矩进行控制,当发电机转速下降至某一阈值时再按照预设速率进行收桨停机。
6、进一步,所述的风力发电机组单桨叶卡死的极限降载控制方法,执行以下步骤:
7、基于每只叶片的实际桨叶角度测量值,计算得到每只叶片的实际桨叶角度测量值与桨叶角度设定值的偏差,当该偏差大于某一阈值且该叶片的变桨速率小于某一阈值时,判断该叶片处于卡桨状态,则进入卡桨停机模式;
8、当风力发电机组进入卡桨停机模式后,考虑到风力发电机组在高转速下直接收桨停机会加剧三只叶片的不平衡载荷,风力发电机组在故障发生后不立即执行收桨停机,而是先降低发电机转速设定值,让发电机转速按照预设速率下降,此时非卡桨叶片通过测量发电机转速与发电机转速设定值的偏差进行变桨pi控制,当测量发电机转速下降到某一阈值时,非卡桨叶片再按照预设速率进行收桨停机;
9、当风力发电机组进入卡桨停机模式后,发电机转矩根据当前测量的发电机转速进行控制,即根据测量的发电机转速实时调整发电机转矩,通过卡桨停机模式下发电机测量转速-转矩设定值查表得到对应的发电机转矩设定值,而后风力发电机组的变流器对发电机转矩设定值进行响应;其中,卡桨停机模式下发电机测量转速-转矩设定值查表当中的发电机转矩设定值能够根据降载需求进行调整,但要在变流器的承受范围内,当风力发电机组测量功率小于某一阈值时,发电机转矩设定值为0。
10、进一步,风力发电机组的每只叶片都安装有桨叶角度传感器,通过所述桨叶角度传感器能获取每只叶片的实际桨叶角度测量值,设θi表示叶片的桨叶角度测量值,i=1,2,3,当i=1时代表叶片1,i=2时代表叶片2,i=3时代表叶片3,表示叶片的变桨速率,di表示叶片的桨叶角度设定值,则每只叶片的桨叶角度测量值与桨叶角度设定值的偏差δθi=|θi-di|,允许的桨叶角度偏差最大值设为δθmax,δ表示允许的变桨速率测量偏差值,该值为接近0的数,当δθi>δθmax且时,判断该叶片处于卡桨状态,则进入卡桨停机模式。
11、进一步,当风力发电机组进入卡桨停机模式后,将发电机转速设定值修改为并网转速s1,让发电机转速按照预设速率v下降,此时非卡桨叶片的桨叶角度θdem通过测量发电机转速s与并网转速s1的偏差进行变桨pi控制,当发电机转速s下降到α*srated时,非卡桨叶片再按照预设速率v1进行收桨停机,直至桨叶角度达到停机顺桨最大角度;其中,所述srated为发电机额定转速,α是0~1之间的小数,为发电机额定转速的百分比,能根据实际载荷仿真计算确定。
12、进一步,在卡桨停机模式下发电机测量转速-转矩设定值查表当中,发电机转速那一栏,由小到大、从左到右依次为smin、s1、s2、srated、sover,发电机转矩设定值那一栏分别对应上述的smin、s1、s2、srated、sover由小到大、从左到右依次为0、t1、t2、t3、t4,其中,smin为变流器的脱网转速,s2为发电机同步转速,sover为软件超速阈值,设置为发电机额定转速的倍数。
13、进一步,所述风力发电机组配置有传感器对发电机转速进行测量。
14、本发明的第二目的通过下述技术方案实现:风力发电机组单桨叶卡死的极限降载控制系统,用于实现上述的风力发电机组单桨叶卡死的极限降载控制方法,其包括:
15、卡桨判断模块,基于每只叶片的实际桨叶角度测量值,计算得到每只叶片的实际桨叶角度测量值与桨叶角度设定值的偏差,当该偏差大于某一阈值且该叶片的变桨速率小于某一阈值时,判断该叶片处于卡桨状态,则进入卡桨停机模式;
16、变桨控制模块,用于在风力发电机组进入卡桨停机模式后,不立即执行收桨停机,而是先降低发电机转速设定值,让发电机转速按照预设速率下降,此时非卡桨叶片通过测量发电机转速与发电机转速设定值的偏差进行变桨pi控制,当测量发电机转速下降到某一阈值时,非卡桨叶片再按照预设速率进行收桨停机;
17、发电机转矩控制模块,用于在风力发电机组进入卡桨停机模式后,根据当前测量的发电机转速对发电机转矩进行控制,即根据测量的发电机转速实时调整发电机转矩,通过卡桨停机模式下发电机测量转速-转矩设定值查表得到对应的发电机转矩设定值,而后风力发电机组的变流器对发电机转矩设定值进行响应;其中,卡桨停机模式下发电机测量转速-转矩设定值查表当中的发电机转矩设定值能够根据降载需求进行调整,但要在变流器的承受范围内,当风力发电机组测量功率小于某一阈值时,发电机转矩设定值为0。
18、本发明的第三目的通过下述技术方案实现:一种存储介质,存储有程序,所述程序被处理器执行时,实现上述的风力发电机组单桨叶卡死的极限降载控制方法。
19、本发明的第四目的通过下述技术方案实现:一种计算设备,包括处理器以及用于存储处理器可执行程序的存储器,所述处理器执行存储器存储的程序时,实现上述的风力发电机组单桨叶卡死的极限降载控制方法。
20、本发明与现有技术相比,具有如下优点与有益效果:
21、1、本发明是在现有的单叶片卡桨控制方法上进行停机控制逻辑的改进,对机组原有的系统硬件配置没有增加要求,避免增加硬件开发成本。
22、2、本发明根据原有的单叶片卡桨故障报警逻辑,在停机过程中改进非卡桨叶片的变桨控制逻辑,不会更改机组安全链故障报警逻辑,不影响机组整体安全性。
23、3、本发明在触发卡桨故障后,不立即执行收桨停机,而是先降低发电机转速设定值,当发电机转速下降到某一阈值后再按照一定速率收桨停机,使得三只叶片的不平衡载荷得到有效降低。
24、4、本发明在停机过程中的发电机转矩设定值是在变流器所能承受的范围内给定的,不会增加变流器成本,也能保证变流器的安全运行。
25、5、本发明详述了单叶片卡桨故障发生后的停机逻辑,可以有效解决大型风力发电机组在单叶片卡桨工况下轮毂极限载荷较大的问题,依据所述逻辑使得轮毂系统载荷满足设计要求。
- 还没有人留言评论。精彩留言会获得点赞!