一种水下远程遥控机器人的单自由度云台结构
1.本发明属于水下机器人技术领域,具体涉及一种水下远程遥控机器人单自由度云台结构的改进及其保护装置。
背景技术:
2.随着工业革命的爆发,陆地资源已经逐渐匮乏,人们开始将目光转向资源丰富的海洋,越来越多的水下航行器开始被应用到海底世界的探索,比如远程遥控机器人(rov)、无人无缆水下机器人(uuv)和智能水下机器人(auv),它可以代替人类潜入海底完成对海底资源的探索。现有技术的多数水下机器人都搭载不同种类的摄像机,然而大部分的水下摄像机位置无法移动,当被观测物体处于移动状态时,摄像机无法跟踪准确记录其图像,导致拍摄的图像模糊不清,甚至可能会由于物体移动过快,摄像机不能聚焦其位置,致使丢失物体画面信息。部分水下机器人搭载了水下云台,其作用是承载水下摄像头、水下照明灯和声呐等观测设备,可以在水下机器人进行工程作业时多个自由度调节仪器姿态。
3.然而由于水下环境复杂多变,不仅有礁石等固体,还有海底生物等可移动物体,云台在随航行器行进过程中可能会遭受来自外部物体的撞击,使摄像机或照明灯受损,无法进行海底信息的获取,因此对于水下云台摄像机和照明灯的保护越来越重要。
4.为此亟需设计一种专门用于在水下远程遥控机器人上的单自由度云台结构,它能够在云台受到冲击或者过大外部力矩时,自动保护照明灯和摄像机;还要求具备云台位置控制和显示功能。
技术实现要素:
5.本发明的目的是,克服现有技术的水下机器人所存在的无机械结构力矩保护功能,容易损坏水下摄像机和水下照明灯等设备,且没有云台角度传感器,无法获得云台的转角准确信息的缺陷,也没有电机压力补偿器,不能根据作业情况及时调整电机内外压差,本发明提供一种功能更齐全、保护设施更完善、信息获取更充分的水下远程遥控机器人的单自由度云台结构。
6.本发明的目的是通过以下技术方案实现的。
7.一种水下远程遥控机器人的单自由度云台结构,其特征是,云台本体上设置电机驱动系统,并通过链轮传动系统牵引可转动地连接于云台上的照明灯、照相机和摄像机,链轮传动系统的输出端串接力矩保护系统;云台本体上设置有可用于云台位置控制和显示的角度传感器,云台通过左固定板和右固定板固定在机器人的框架前端凹槽内部。
8.优选方案,电机驱动系统包括密封安装于驱动器舱中的水下直流无刷电机,并通过减速器模块连接于左固定板,减速器模块输出轴固连主动小链轮,利用链条连接设置于左固定板另一侧的从动大链轮,大链轮输出轴端串接有力矩保护系统。
9.优选方案,力矩保护系统包括依次配合在离合器连轴的第一摩擦盘、第二摩擦盘、蝶形弹簧和双螺母锁紧结构,第一摩擦盘的端面与大链轮的端面抵压,第一螺母和第二螺
母组成的双螺母锁紧结构与螺栓锁紧离合器连轴,通过第二螺母压紧蝶形弹簧,为第二摩擦盘和第一摩擦盘及大链轮之间提供压紧力;链轮驱动系统的大链轮与力矩保护系统的离合器连轴通过轴孔可同轴转动的配合连接。
10.当云台本外部承受过大的作用力矩时,碟形弹簧会释放部分势能,会让第一摩擦盘和第二摩擦盘打滑,从而实现力矩的限制,保证与离合器连轴连接的云台本体系统之间最大力矩限制,从而保护照明灯、照相机和摄像机。
11.优选方案,云台本体系统包括托盘,托盘固定有用于放置摄像机、照相机和多个照明灯的支架,摄像机、照相机和多个照明灯使用不锈钢卡箍固定到支架上,尾部各安装有一水密接插件;托盘靠近右固定板一端通过第一抱箍和第二抱箍固定传感器舱轴,传感器舱轴的端面与托盘固定,穿过右固定板上的滑动轴承,与右固定板上滑动轴承的孔配合连接,传感器舱一侧安装有用于连接角度传感器输出轴尾线的宝塔形输出接插件,角度传感器内置在传感器舱轴内部,传感器输出轴与轴端盖用传感器转接板连接,角度传感器通过螺钉一固定在传感器舱轴上,角度传感器、传感器舱轴、托盘可以相互转动地间隙配合,通过右固定板将云台固定在水下机器人本体上。
12.该机构用来检测并提供云台的输出转角值。
13.优选方案,水下电机尾部有尾端盖,尾端盖的后端通过螺栓安装压力补偿器,压力补偿器用来平衡电机内外舱压力平衡,补偿器呈杯型结构,压力补偿器内部有一用来感应电机内部和海水压力变化并起到密封作用的帽形橡胶膜片,膜片底部呈唇形结构,底部位于补偿器和尾端盖连接处,,膜片上端与补偿器之间分别装有连接块、压力弹簧和内六角圆柱形螺钉,连接块粘贴在膜片上。
14.螺钉起液位指示器作用,为保证云台在水下作业时电机内部压力大于外部海水压力,当外部海水压力较大时会迫使内六角圆柱形螺钉向电机内部凹陷,此时可向电机内充油液以保证电机内压力大于外部海水压力,压力弹簧充当压力缓冲装置。
15.本发明的有益效果是:
16.1、专门用于水下远程遥控机器人(rov)上作业的自由度云台,使云台功能更完善;
17.2、通过在电机传动系统中增设碟形弹簧与成对的摩擦盘结构,以限制传递最大扭矩,有效避免了云台运动过程中幅度过大,及时保护摄像机和水下照明灯等关键零部件;
18.3、设置云台角度传感器,可用于云台位置控制和显示,更直观准确;
19.4、云台水下电机可以根据作业情况及时调整电机内外压差,功能更可靠。
附图说明
20.图1是本发明实施例的云台结构体上视示意图;
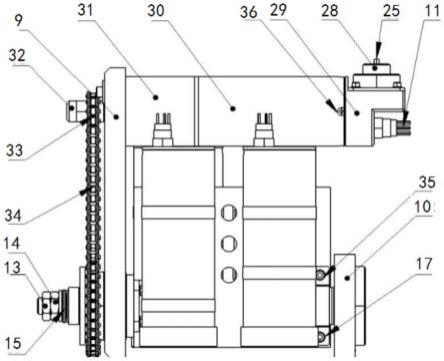
21.图2是电机传动结构体左视示意图;
22.图3是云台结构体前视示意图;
23.图4是图2的a-a剖视示意图;
24.图5是图3的b-b剖视示意图;
25.图6是电机传动结构体后视示意图;
26.图7是水下机器人整体结构立体示意图;
27.图8是云台整体结构立体示意图。
28.图中:机器人1;云台2;照明灯3;照相机4;摄像机5;照明灯6;托盘7;支架8;左固定板9;右固定板10;水密接插件11;不锈钢卡箍12;第一螺母13;第二螺母14;蝶形弹簧15;大链轮16;第一抱箍17;第一摩擦盘18;第二摩擦盘19;离合器连轴20;螺栓一21;l形转接板22;宝塔形输出接插件23;传感器舱轴24;角度传感器25;螺钉一26;传感器转接板27;压力补偿器28;尾端盖29;驱动器舱30;减速器模块31;毂帽32;小链轮33;链条34;第二抱箍35;螺钉二36;水密接插件37;水密接插件38;水密接插件39;水密接插件40;螺栓二41;压力弹簧42;连接块43;橡胶膜片44;驱动板45;内六角圆柱形螺钉46;螺栓三47;梯形键槽48。
具体实施方式
29.下面结合附图对本发明的实施例作详细说明:本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
30.实施例:一种水下远程遥控机器人1的单自由度云台结构,云台2本体上设置有电机驱动系统,并通过链轮传动系统牵引可转动地连接于云台2上的照明灯3、照相机4、摄像机5和照明灯6,链轮传动系统的输出端串接有力矩保护系统;在云台2本体上还设置有可用于云台2位置控制和显示的角度传感器25,云台2通过左固定板9和右固定板10固定在机器人1框架的前端凹槽内部。参见图1。
31.电机驱动系统包括密封安装于驱动器舱30中的水下直流无刷电机,并通过减速器模块31连接于左固定板9,减速器模块31输出轴固连主动小链轮33,利用链条34连接设置于左固定板9另一侧的从动大链轮16,大链轮16输出轴端串接力矩保护系统。电机通过4根螺栓二41对称固定在左固定板9上,主动小链轮33通过梯形键连接电机输出轴上的梯形键槽48上,在轴的顶端开有螺孔,用于安装毂帽32以定位小链轮33。电机为主动小链轮33提供动力,以此来带动大链轮16转动,电机经减速器模块31驱动齿轮减速,在不增加电机功率的情况下增加可用的输出扭矩。参见图2、图3、图4。
32.电机独立于摄像机5后端,垂直于左固定板9,电机前端依次是电机输出轴、减速器模块31,尾部依次是驱动器舱30、尾端盖29和压力补偿器28。驱动器舱30外壳材料使用304不锈钢,内部装有驱动板45。尾端盖29用4根螺钉二36对称固定在电机本体上,其一端固定水密接插件11,另一端通过4个螺栓三47安装压力补偿器28,压力补偿器28用来平衡电机内外舱压力平衡,压力补偿器28总体呈杯型结构。压力补偿器28内部有一帽形橡胶膜片44,用来感应电机内部和海水压力变化,橡胶膜片44底部呈唇形结构,底部位于压力补偿器28和尾端盖29连接处,起密封作用,橡胶膜片44上端与压力补偿器28之间分别装有连接块43、压力弹簧42和内六角圆柱形螺钉46,连接块43粘贴在橡胶膜片44上,内六角圆柱形螺钉46起液位指示器作用,为保证云台2在水下作业时电机内部压力大于外部海水压力,当外部海水压力较大时会迫使内六角圆柱形螺钉46向电机内部凹陷,此时可向电机内充油液以保证电机内压力大于外部海水压力,压力弹簧42充当压力缓冲装置。水密接插件采用环氧树脂与金属粘接形式,用来实现设备与系统间电力配电、信号传输。参见图5、图6。
33.力矩保护系统包括依次配合在离合器连轴20的第一摩擦盘18、第二摩擦盘19、蝶形弹簧15和锁紧螺母,第一摩擦盘18的端面与大链轮16的端面抵压,第一螺母13和第二螺母14组成的双螺母锁紧结构与螺栓锁紧离合器连轴20,通过第二螺母14压紧蝶形弹簧15为
第二摩擦盘19和第一摩擦盘18及大链轮16之间提供压紧力,从而实现力矩的限制,保证与离合器连轴20连接的云台2本体系统之间最大力矩限制,当云台2本外部承受过大的作用力矩时,碟形弹簧15会释放部分势能,会让第一摩擦盘18和第二摩擦盘19打滑,从而保护照明灯3、照明灯6和摄像机5。链轮驱动系统的大链轮16与力矩保护系统的离合器连轴20通过轴孔配合连接,两者可以同轴转动,且运动互不干涉。。
34.云台2本体系统包括托盘7,托盘7固定有用于放置摄像机5、照相机4和照明灯3、照明灯6的支架8,摄像机5、照相机4和照明灯3、照明灯6使用不锈钢卡箍12固定到支架8上,尾部都安装有一水密接插件。托盘7靠近右固定板10一端通过第一抱箍17和第二抱箍35固定传感器舱轴24,传感器舱轴24的端面与托盘7固定,穿过右固定板10上的滑动轴承,与右固定板10上滑动轴承的孔配合连接,传感器舱一侧安装有用于连接角度传感器25输出轴尾线的宝塔形输出接插件23,角度传感器25内置在传感器舱轴24内部,传感器输出轴24与轴端盖用传感器转接板27连接,角度传感器25通过螺钉一26固定在传感器舱轴24上,角度传感器25、传感器舱轴24、托盘7可以相互转动地间隙配合,用来检测云台2的输出转角,右固定板10为整体呈u形结构,用来将云台2固定在水下机器人1本体上。左固定板9和右固定板10采用聚丙烯材料,能够有效的防止海水中酸、碱等有机溶剂的腐蚀,u形的固定板两侧用来与水下远程遥控机器人1固定连接。
35.托盘7靠近左固定板9一端通过l形转接板22与离合器连轴20固定,l形转接板22一端端面通过螺栓一21与离合器连轴20固定,另一端端面直接与托盘7接触,托盘7通过l形转接板22带动离合器连轴20转动。角度传感器25的端面与托盘7固定,当受到外力干扰时,托盘7发生转动继而带动角度传感器连轴24和离合器连轴20转动,此过程中,角度传感器25会检测云台2的输出转角,通过水密接插件2将信息反馈给终端显示器,与此同时力矩保护系统的双螺母和双摩擦盘会实现力矩的限制,通过离合器联轴20限制托盘7的转动,继而保护云台2本体系统。
36.水下机器人整体结构示意图参见图7。
37.云台整体结构示意图参见图8。
38.云台2在使用之前,操作人员先将云台2通过多个连接装置固定在水下远程遥控机器人(rov)前端,使用时云台2随着rov下潜至作业地点,云台2通过角度传感器检测云台的输出转角,使用电缆将结果传输到外部终端,通过外部终端来控制rov行进方向来实现偏移和俯仰运动,以及时调整照明角度和拍摄视角。
39.以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1