确定行驶轨迹的方法与流程
1.本公开涉及自动驾驶技术,尤其涉及一种确定行驶轨迹的方法。
背景技术:
2.目前,很多车辆中都设置有定位系统,尤其是在辅助驾驶车辆中,车辆需要根据定位系统中的定位结果制定行驶策略。
3.自动驾驶的定位方案通常以卡尔曼滤波器为主流,通过融合gps-rtk(global positioning system-real-time kinematic,全球定位系统-实时动态差分技术)、imu(inertialmeasurementunit,惯性测量单元)、道路元素(车道线、标识牌等)匹配信息等,输出厘米级别的定位。
4.其中,imu在航迹推演过程中,存在累计误差,如果长时间无法得到有效的观测数据,通过二次积分得到的位置信息的误差会随时间快速发散,导致定位结果不可用。
5.在实际的驾驶过程中,很多场景都会存在观测数据无效的情况:城市峡谷、隧道等场景会影响gps信号;雨、雪天气等场景会影响视觉设备的识别功能,而imu又存在累计误差,就会导致观测数据和航迹推演的结果均不准确,进而无法得到车辆准确的定位结果。
技术实现要素:
6.本公开提供一种确定行驶轨迹的方法,以解决现有技术中航迹推演的结果不准确的问题。
7.本公开的第一个方面是提供一种确定行驶轨迹的方法,包括:
8.获取车辆中设置的组合导航系统输出的定位结果的置信度,若所述置信度表征所述定位结果失效,则获取所述车辆的上一刻位置以及高精地图数据;
9.根据所述上一刻位置、所述高精地图数据确定局部车道线的信息;
10.获取所述车辆的实时速度,并根据所述局部车道线的信息、所述实时速度确定车辆的行驶信息,并根据所述行驶信息确定所述车辆的行驶轨迹,所述行驶轨迹用于确定所述车辆的位置。
11.本公开的另一个方面是提供确定行驶轨迹的装置,包括:
12.获取单元,用于获取车辆中设置的组合导航系统输出的定位结果的置信度;
13.所述获取单元还用于若所述置信度表征所述定位结果失效,则获取所述车辆的上一刻位置以及高精地图数据;
14.局部车道确定单元,用于根据所述上一刻位置、所述高精地图数据确定局部车道线的信息;
15.所述获取单元还用于获取所述车辆的实时速度;
16.轨迹确定单元,用于根据所述局部车道线的信息、所述实时速度确定车辆的行驶信息,并根据所述行驶信息确定所述车辆的行驶轨迹,所述行驶轨迹用于确定所述车辆的位置。
17.本公开的又一个方面是提供一种车载设备,包括:
18.存储器;
19.处理器;以及
20.计算机程序;
21.其中,所述计算机程序存储在所述存储器中,并配置为由所述处理器执行以实现如上述第一方面所述的确定行驶轨迹的方法。
22.本公开的又一个方面是提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行以实现如上述第一方面所述的确定行驶轨迹的方法。
23.本公开提供的确定行驶轨迹的方法,包括:获取车辆中设置的组合导航系统输出的定位结果的置信度,若置信度表征定位结果失效,则获取车辆的上一刻位置以及高精地图数据;根据上一刻位置、高精地图数据确定局部车道线的信息;获取车辆的实时速度,并根据局部车道线的信息、实时速度确定车辆的行驶信息,并根据行驶信息确定车辆的行驶轨迹。本公开提供的确定行驶轨迹的方法,能够在组合导航系统输出的定位结果失效时,结合车速以及高精地图中的车道线进行较长时间的车辆行驶轨迹的推演,从而可以根据行驶轨迹推断出车辆的当前位置。
附图说明
24.图1为本公开一示例性实施例示出的确定行驶轨迹的方法的流程示意图;
25.图2为本公开一示例性实施例示出的确定车辆的行驶轨迹示意图;
26.图3为本公开另一示例性实施例示出的确定行驶轨迹的方法的流程示意图;
27.图4为本公开一示例性实施例示出的在上一刻位置基础上叠加行驶信息的示意图;
28.图5为本公开一示例性实施例示出的确定横向偏移的示意图;
29.图6为本公开一示例性实施例示出的车辆行驶示意图;
30.图7为本技术一示例性实施例示出的确定行驶轨迹的装置的结构图;
31.图8为本技术另一示例性实施例示出的确定行驶轨迹的装置的结构图;
32.图9为本技术一示例性实施例示出的车载设备的结构图。
具体实施方式
33.目前,车辆中设置的定位方案需要融合多个途径的定位信息,具体可以包括gps-rtk(global positioning system-real-time kinematic,全球定位系统-实时动态差分技术)、imu(inertialmeasurementunit,惯性测量单元)、道路元素(车道线、标识牌等)匹配信息等。
34.在一般的定位方案中,对gps-rtk信号的依赖程度更高。但是,在一些特定的环境中可能无法获取准确的定位信息,比如在隧道中gps信号会受到影响,在雨天、雪天的环境中,基于视觉设备获取的道路元素(车道线、标识牌等)匹配信息会受到影响。
35.因此,在无法获取准确的gps-rtk信号时,imu可以在两个有效的gps信号间隔内做短时间航迹推演,输出高频率的相对运动信息,以满足自动驾驶的需求。道路元素匹配信息可以作为辅助手段,在gps信号质量不佳时(城市峡谷、隧道等特殊道路场景),作为补充观
测数据,对imu预测状态量进行校正,同时也可以剔除异常gps数据的影响。
36.然而,imu在航迹推演过程中存在累计误差,若两个有效的gps信号间隔较长,就会导致在这段时间内基于imu的推演结果确定的车辆位置和姿态可能会不准确,因此,如何准确的确定车辆的行驶轨迹,是本案需要解决的技术问题。
37.为了解决上述技术问题,本公开提供的方案中可以基于高精地图中的车道线推演车辆的行驶轨迹,以确定较长时间的车辆行驶轨迹。
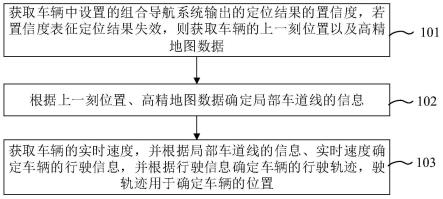
38.图1为本公开一示例性实施例示出的确定行驶轨迹的方法的流程示意图。
39.如图1所示,本公开提供的确定行驶轨迹的方法,包括:
40.步骤101,获取车辆中设置的组合导航系统输出的定位结果的置信度,若置信度表征定位结果失效,则获取车辆的上一刻位置以及高精地图数据。
41.本公开提供的方案可以由具备计算能力的电子设备执行,该电子设备例如可以是车载终端。可以将本公开提供的方案设置在车载终端中,从而使车载终端可以基于本公开提供的方法确定车辆的行驶轨迹。
42.在一种应用场景中,在gps信号失效的情况下,车载终端可以基于本公开提供的方法确定车辆的行驶轨迹,车载终端还可以根据确定的行驶轨迹确定车辆的定位结果,从而解决gps信号失效导致无法获取准确的定位结果的问题。
43.在另一种应用场景中,车载终端需要融合gps-rtk、imu、道路元素匹配信息,得到定位结果时,车载终端也可以基于本公开提供的方法确定车辆的行驶轨迹,从而可以对该行驶轨迹进行融合,得到最终的定位结果。
44.其中,车辆中可以设置组合导航系统,该组合导航系统可以输出定位结果,还可以输出定位结果的置信度。组合导航系统是利用计算机和数据处理技术把具有不同特点的导航设备的输出结果组合在一起,以得到优化的定位结果。比如,可以将惯性导航设备与其他导航设备的输出结果组合在一起。
45.具体的,定位结果的置信度能够用来表征定位结果的准确性,比如,置信度可以包括两个值,一个用于表征定位结果有效,另一个用于表征定位结果失效。再比如,置信度可以包括多个数值,小于预设值的置信度用于表征定位结果失效,大于预设值的置信度用于表征定位结果有效。
46.进一步的,车载终端在基于组合导航系统输出的定位结果时,还可以获取定位结果的置信度,从而基于置信度确定定位结果是否有效。
47.实际应用时,若置信度表征定位结果失效,则说明该定位结果不够准确,不能认为车辆处于该定位结果表征的位置处。在这种情况下,车载终端可以获取上一刻位置,即上一刻有效的位置。
48.其中,获取的上一刻位置可以是组合导航系统输出的有效定位结果,还可以是基于行驶轨迹确定出的定位结果。比如,在时刻0时组合导航系统输出的定位结果有效,在时刻1时组合导航系统输出的定位结果失效,则在时刻1时车载终端可以获取时刻0的定位结果,并基于该准确的定位结果确定车辆行驶轨迹。在时刻2时,若组合导航系统输出的定位结果仍然失效,则车载终端可以获取车辆的上一刻位置,此时获取的上一刻位置可以是基于时刻0得到的行驶轨迹确定出的定位结果。
49.具体的,车载终端中还可以设置高精地图,从而可以获取高精地图数据,从而根据
高精地图数据以及车辆上一刻位置确定车辆的行驶轨迹,进而还可以根据车辆的上一刻位置、行驶轨迹确定车辆当前的位置。
50.步骤102,根据上一刻位置、高精地图数据确定局部车道线的信息。
51.进一步的,车载终端可以从高精地图数据中获取上一刻位置附近的地图数据,从而得到车辆在上一刻位置附近的局部车道线的信息。
52.实际应用时,车载终端可以获取高精地图中,该上一刻位置附近的局部车道线的信息可以包括车道线的位置、车道线的颜色、车道线的线型。车道线的位置可以包括属于车道线的各车道线点的坐标,车道线的颜色例如可以包括黄色、白色等,车道线的线型例如可以包括虚线车道线、实线车道线等。
53.其中,车载终端可以获取距离上一刻位置预设距离的车道线的信息,比如,一条车道线距离上一刻位置小于预设距离,比如50米,则车载终端可以获取这条车道线的信息。
54.具体的,高精地图中存储的车道线可以是一段一段的线,车载终端可以获取完整的一段车道线的信息,也可以获取车道线中的一部分的信息。比如,可以获取一条车道线中距离上一刻位置小于预设距离的部分的信息。
55.步骤103,获取车辆的实时速度,并根据局部车道线的信息、实时速度确定车辆的行驶信息,并根据行驶信息确定车辆的行驶轨迹,行驶轨迹用于确定车辆的位置。
56.进一步的,车载终端还可以获取车辆的实时速度,并根据车辆的实时速度、以及车辆附近的局部车道线的信息,确定车辆的行驶轨迹。
57.实际应用时,车速不同车辆在相同时间内的位移也会不同,因此,车载终端可以根据车辆的实时速度确定车辆的位移。
58.其中,局部车道线的信息中还可以包括各局部车道线的曲线方程,车载终端可以通过对局部车道线的曲线方程进行积分处理的方式,得到车辆的行驶信息。通过这种方式能够基于车道线方程准确的确定出车辆的行驶信息。
59.具体的,车载终端可以获取每一帧的实时速度,还可以根据帧间的时间差值,确定获取的这两帧实时速度之间的位移值。车载终端还可以获取距离车辆最近的车道线的方程,并对该车道线方程进行积分处理,在得到的积分距离长度与位移值相同时,能够得到车辆的行驶信息,该行驶信息具体可以包括车辆的纵向位移、横向位移、航向角增量。
60.进一步的,还可以确定预设时长内车辆的累计横向位移,若累计横向位移较大,则可以认为车辆的行驶方向偏移了车道线本身的方向,这种情况下,可以基于车辆的行驶方向以及行驶信息,确定车辆的行驶轨迹。若累积横向位移不大,则可以认为车辆的行驶方向没偏移车道线本身的方向,此时,车载终端可以根据车辆的上一刻位置,以及当前的行驶信息,确定车辆从上一刻到当前时刻的行驶轨迹。
61.车辆航向角通常指地面坐标系下,车辆质心速度与车辆横轴的夹角。
62.图2为本公开一示例性实施例示出的确定车辆的行驶轨迹示意图。
63.如图2所示,车辆的上一时刻位置为p,可以根据车辆当前的实时速度确定车辆从上一时刻到当前时刻的行驶信息,进而生成从上一时刻到当前时刻的行驶轨迹l。
64.此后,车载终端还可以根据上一时刻位置p、行驶轨迹l确定出车辆当前的位置p1。
65.本公开提供的确定行驶轨迹的方法,包括:获取车辆中设置的组合导航系统输出的定位结果的置信度,若置信度表征定位结果失效,则获取车辆的上一刻位置以及高精地
图数据;根据上一刻位置、高精地图数据确定局部车道线的信息;获取车辆的实时速度,并根据局部车道线的信息、实时速度确定车辆的行驶信息,并根据行驶信息确定车辆的行驶轨迹。本公开提供的确定行驶轨迹的方法,能够在组合导航系统输出的定位结果失效时,结合车速以及高精地图中的车道线进行较长时间的车辆行驶轨迹的推演,从而可以根据行驶轨迹推断出车辆的当前位置。
66.图3本公开另一示例性实施例示出的确定行驶轨迹的方法的流程示意图。
67.如图3所示,本公开提供的确定行驶轨迹的方法,包括:
68.步骤301,获取车辆中设置的组合导航系统输出的定位结果的置信度。
69.步骤301与步骤101中相关内容的实现方式类似,不再赘述。
70.若置信度表征定位结果失效,则执行步骤302,若置信度表征定位结果有效,则执行步骤317。
71.步骤302,若置信度表征定位结果失效,则获取车辆的上一刻位置以及高精地图数据。
72.步骤302与步骤101中相关内容的实现方式类似,不再赘述。
73.步骤303,根据车辆的上一刻位置,从高精地图数据中获取与上一刻位置的距离小于预设值的车道线信息。
74.其中,车载终端可以在高精地图数据中获取车辆上一刻位置附近的车道线的信息。由于当前时刻组合导航系统输出的定位结果不够准确,因此,可以基于车辆上一刻位置获取车道线信息。
75.具体的,可以预先设置预设值,若车道线与上一刻位置的间距小于该预设值,则可以认为车道线在车辆附近,此时,可以获取该车道线的信息。
76.步骤304,根据获取的车道线的信息生成局部车道线地图。
77.进一步的,车载终端还可以生成局部车道线地图,该局部车道线地图中可以包括各局部车道线的位置信息。还可以包括各局部车道线的线型、颜色等信息。
78.实际应用时,各局部车道线的位置信息包括车道线上各车道线点的坐标。
79.步骤305,根据局部车道线地图中每条车道线的位置信息、车辆的上一时刻位置,确定局部车道线地图中每一车道线的曲线方程。
80.其中,车载终端可以对局部车道线地图中的每一车道线进行处理,得到每一车道线的曲线方程。
81.具体的,局部车道线地图中可以包括各车道线的第一坐标,该第一坐标是高精地图中坐标系的坐标。车载终端还可以根据车辆的上一时刻位置构建车身坐标系,并根据每一车道线点的第一坐标与上一时刻位置的相对位置,将每一第一坐标转换为车身坐标系中的第二坐标。
82.车载终端还可以基于各车道线点的第二坐标,对属于同一车道线的各车道线点进行拟合,得到局部车道线地图中各车道线的曲线方程
83.实际应用时,车载终端可以根据车辆的上一时刻位置构建车身坐标系,并获取局部车道线中每条车道线中的车道线点的坐标,还可以将获取的车道线点的坐标转换到车身坐标系。
84.其中,车载终端可以根据坐标转换后的每一车道线点的坐标,拟合得到局部车道
线地图中每一车道线的曲线方程。比如可以将车道线拟合成三次曲线x=a0+a1*y+a2*y2+a3*y3,其中x表示东向,y表示北向,即获得车道线方程。由于a0即是车身坐标系下车与车道线的距离,根据绝对值大小,即可得到距离车辆最近的车道线索引,还可以获取距离车辆最近的车道线方程系数,也就是获取a0、a1、a2、a3的值。
85.本实施例提供的方案中,车道线的信息可以包括车道线的方程,还可以包括局部车道线地图中的车道线颜色、线型等信息。
86.具体的,构建的车道线的曲线方程中可以包括用于表征车辆与车道线距离的距离参数,比如上述方程中的a0表示车辆与车道线的距离。比如,在时刻t可以根据车辆的上一时刻位置、高精地图数据确定多个局部车道线的曲线方程,针对每一曲线方程中都具有一个用于表征车辆与车道线距离的距离参数,因此,可以基于该距离参数确定车辆与每一局部车道线的距离。
87.步骤306,根据各车道线的曲线方程中包括的距离参数,确定车辆距离最近的车道线。
88.进一步的,车载终端确定出各车道线的曲线方程后,可以根据各方程中包括的距离参数,确定距离车辆最近的车道线。从而可以根据该车道线推演车辆的行驶轨迹。
89.步骤307,根据实时速度、获取上一刻位置的时间与当前时间的时间差,确定车辆的位移。
90.实际应用时,车载终端可以确定每一时刻车辆所处的位置,比如,获取上一刻位置的时间是t,那么可以基于时刻t与当前时间确定时间差,比如当前时间为t1,那么时间差为t-t1。
91.其中,车载终端可以根据车辆在当前时间的实时速度、确定的时间差,确定车辆从上一时刻到当前时间行驶的位移。比如,获取连续的两个位置的时间差为
△
t,车辆在当前时间的实时速度为v,则车辆的从上一刻到当前时间的位移为
△
t*v。
92.步骤308,根据车辆的位移、距离车辆最近的车道线的曲线方程,确定车辆的行驶信息。
93.具体的,车载终端可以根据基于车身坐标系构建的车道线的曲线方程,确定距离车辆最近的车道线的曲线方程,从而可以基于距离车辆最近的车道线,以及车辆从上一时刻到当前时间行驶的位移,确定车辆的行驶信息。
94.进一步的,车载终端可以根据位移对距离车辆最近的车道线的曲线方程积分处理,得到车辆的横向移动距离、纵向移动距离、航向角增量。具体可以用车道线方程积分,积分距离长度与车辆从上一时刻到当前时刻的位移值大小一致,从而得到车辆的横向移动距离、纵向移动距离以及航向角增量。
95.步骤309,在车辆的上一时刻位置基础上叠加横向移动距离、纵向移动距离、航向角增量,得到车辆当前时刻的位置姿态,其中,行驶轨迹包括车辆连续的位置姿态;其中,行驶信息包括车辆的横向移动距离、纵向移动距离、航向角增量。
96.实际应用时,确定出车辆的行驶信息后,车载终端可以在车辆上一时刻位置基础上叠加横向移动距离、纵向移动距离、航向角增量,得到车辆当前时刻的位置姿态。
97.其中,在车辆的上一时刻位置基础上叠加横向移动距离、纵向移动距离、航向角增量,就能够得到车辆在当前时刻的位置,当确定了车辆在下一刻的位置,可以再在当前时刻
位置基础上进行叠加,基于此,能够得到连续多个时刻车辆的行驶轨迹。
98.在一种可选的实施方式中,可以根据车辆的行驶轨迹确定车辆当前时刻所在的位置,还可以将该位置转换为高精地图中的坐标系,从而使车载终端能够基于转换坐标后的位置指定车辆的控制策略。
99.图4为本公开一示例性实施例示出的在上一刻位置基础上叠加行驶信息的示意图。
100.如图4所示,车辆在上一时刻的位置为p,从上一时刻到当前时刻车辆的行驶信息可能包括纵向位移y1,横向位移x1,导航角增量α,那么在位置p的基础上可以叠加y1、x1、α,从而确定车辆从上一时刻到当前时间的行驶轨迹l。
101.在步骤308之后还可以包括步骤310-312。
102.步骤310,根据预设时长内的行驶信息中包括的各航向角增量确定车辆在预设时长内的横向偏移。
103.其中,车载终端可以存储车辆的行驶信息,具体可以存储车辆的各航向角增量。并在需要确定车辆的横向偏移时,获取当前时刻之前预设时长内车辆的航向角增量。
104.比如,可以设置一时间窗口,该时间窗口的长度与预设时长相同,车载终端可以获取当前时刻之前该时间窗口内的航向角增量,并确定在该时间窗口内车辆的横向位移。
105.具体的,车载终端可以根据预设时长内行驶信息中包括的各航向角增量,确定预设时长内车辆的各航向角。比如,可以根据上一时刻车辆的航向角,以及上一时刻到当前时刻车辆的航向角增量,确定车辆在当前时刻的航向角。
106.进一步的,车载终端还可以存储车辆在每一时刻的车辆速度,车载终端可以获取预设时长内车辆的各车辆速度。
107.实际应用时,车辆可以根据各航向角、各车辆速度确定车辆在预设时长内的横向偏移。其中,可以根据车辆的速度、相邻时刻的时间差,确定车辆的位移,并结合车辆的各航向角,确定车辆在每相邻的两个时刻之间的横向偏移,进而得到预设时长内车辆总的横向偏移。
108.可以根据车辆在预设时长始端所处的位置姿态确定横向、纵向,比如,可以将车辆在预设时长始端时车辆的朝向作为纵向,与该朝向垂直的方向为横向。
109.该横向偏移是指在预设时长内,车辆在预设时长末端所处的位置,相较于车辆在预设时长始端所处的位置的横向偏移,具体可以根据车辆在预设时长始端所处的位置姿态确定的横向、纵向,确定车辆的横向偏移。
110.图5为本公开一示例性实施例示出的确定横向偏移的示意图。
111.如图5所示,在预设时长内的起始时刻ts时,车辆的位置姿态如p1所示,则可以将方向a作为横向,将方向b作为纵向。在预设时长内的末端时刻te时,车辆的位置姿态如p2所示,则可以确定p1、p2的位置在方向a的偏移,将其作为车辆在预设时长内的横向偏移。
112.步骤311,若横向偏移大于检测阈值,则根据车辆的各航向角确定车辆是否变道。
113.其中,若确定的横向偏移大于检测阈值,则可以认为车辆可能存在变道的情况,这种情况下,车载终端可以根据车辆的各航向角确定车辆是否变道。
114.具体的,若横向偏移小于检测阈值,则可以认为车辆直行行驶,不需要执行判断车辆是否变道的步骤。
115.进一步的,车载终端可以根据车辆的各航向角确定是否存在以下任一种情况:
116.弯道行驶情况、车身回正情况、存在异常的航向角;
117.若均不存在,则确定车辆在变道。
118.若在预设时长内车辆的横向偏移大于检测阈值,则可能是车辆在变道,还有可能是车辆在弯道行驶的情况,还有可能是车身回正的情况,若存在异常的航向角,也有可能导致确定车辆在预设时长内的横向偏移较大。因此,需要对这些情况加以区分,以使车载终端能够准确的识别出车辆的变道情况。
119.实际应用时,若距离车辆最近的车道线与车身方向间的角度差大于弯道角度阈值,且相邻时刻车辆的航向角的角度差小于弯道角度阈值,则确定车辆为弯道行驶情况;
120.其中,车身方向是根据各航向角确定的。
121.图6为本公开一示例性实施例示出的车辆行驶示意图。
122.如图6所示,车辆在道路中行驶时,从p1位置行驶到p2位置处,距离车辆最近的车道线为l。当车辆处于p2位置时,可以确定车辆的在当前时刻的车身方向与车道线l起点的切线方向间的第一角度61,还可以确定车辆的车身方向与车道线l终点的切线方向间的第二角度62。
123.其中,若第一角度61与第二角度62之间的差值大于弯道角度阈值,则可以认为车道线l为弯道车线。同时,若预设时长内相邻的航向角之间的角度差值小于弯道角度阈值,则可以认为车辆是缓慢的改变车辆的航向角的,因此,可以确定车辆为弯道行驶情况。
124.具体的,若预设时长内相邻的航向角之间的角度差值大于弯道角度阈值,则确定存在异常的航向角。比如,任意两个相邻的航向角之间的角度差值过大,则可以认为存在异常的航向角。
125.进一步的,若检测到车辆连续两次疑似变道,且这两次疑似变道的方向相反,且这两次疑似变道的时间间隔小于车身回正窗口时间,则确定车辆为车身回正情况。
126.若根据车辆的各航向角确定连续两次变道情况,则可以将这两次变道情况标记为疑似变道,因此,可以对这两次变道情况进行进一步的确定,以确定这两次变道是变道了还是车身回正情况。
127.实际应用时,这两次疑似变道的方向相反,且这两次疑似变道的时间间隔小于车身回正窗口时间,则确定车辆为车身回正情况。
128.比如可以根据车辆的航向角变化情况确定车辆的变道方向,进而确定这两次疑似变道的方向是否相反。还可以预先设置车身回正窗口时间,若两次疑似变道的方向相反,且时间间隔较短,则可以认为车辆在回正车身,并非变道。
129.步骤312,若确定车辆变道,则根据变道情况变更距离车辆最近的车道线。
130.其中,若确定车辆确实在变道,则车载终端可以根据车辆的变道方向,确定距离车辆最近的车道线。
131.具体的,可以更新步骤306中确定的车道线。
132.此后,车载终端可以根据更新后的车道线继续确定车辆的位置,比如,可以基于更新后的车道线执行步骤308。从而基于更新后的车道线确定车辆的行驶轨迹,以得到更加准确的行驶轨迹。
133.若不变道,则车载终端可以根据当前确定的距离车辆最近的车道线继续确定车辆
的行驶轨迹。
134.可选的,本公开提供的方案中还可以包括:
135.步骤313,获取车辆中设置的视觉设备输出的图像,并在图像中识别车道线。
136.在一种可选的实施方案中,车载终端还可以获取车辆的视觉设备输出的图像。比如,车辆中可以设置摄像头,进而可以通过摄像头采集车辆前方的环境图像。
137.若通过摄像头能够拍摄到较为清晰的图像,则车载终端可以对该图像进行处理,从而对行驶信息中的横向移动距离进行纠正,从而更加准确的确定车辆的行驶轨迹。
138.其中,车载终端可以判断视觉设备输出的图像是否有效,若图像有效,则可以执行步骤313。
139.具体的,车载终端可以识别当前时刻采集的图像中的车道线,比如,可以在车载终端中设置车道线识别算法,车载终端可以基于该识别算法对视觉设备输出的图像进行处理,进而确定该图像中包括的车道线。
140.步骤314,根据行驶信息,以车辆的视角从高精地图数据中获取车道线信息。
141.进一步的,车载终端可以根据确定的车辆的行驶信息,确定车辆所在的位置,还可以从高精地图中以车辆所在位置的视角获取车道线信息。比如,车载终端确定车辆位于位置p,则车载终端可以以位置p的视角从高精地图中获取车道线信息。
142.步骤315,根据图像中的车道线的信息与高精地图数据中获取的车道线的信息确定车辆的实际位置。
143.实际应用时,车载终端可以比对图像中的车道线与从高精地图中获取的车道线信息,从而可以基于比对结果修正确定的横向移动距离。比对结果例如可以包括线型比对结果,车道线的颜色比对结果等。
144.其中,车载终端还可以基于车道线的比对结果确定车辆的实际位置。
145.一种实施方式中,可以调整车辆的横向位移,并基于更新后的位移重新从高精地图中获取车道线信息,使得图像中的车道线信息与获取的车道线信息一致。
146.另一种实施方式中,车载终端可以根据车辆在上一刻的位置,在每一车道中确定候选位置,比如,可以根据上一时刻位置距离其所属车道两侧车道线的距离,确定每一车道中的候选位置;上一时刻位置距离其车道两侧车道线的距离的比例,与候选位置距离其所属车道两侧车道线的距离的比例相同。比如,上一时刻位置与左侧车道线的和右侧车道线的距离比为2:3,则可以针对每一车道都确定一位置候选点,每一位置候选点与其所在车道的左侧车道线和右侧车道线的距离比为2:3。
147.实际应用时,车载终端还可以根据图像中的车道线与高精地图数据中的车道线,确定车辆处于每一候选位置的概率;从而根据各概率确定车辆的实际位置。
148.其中,可以基于下式确定每一候选位置的概率:
149.p(p
candidate
|obs)=η
·
p(obs|p
candidate
)
·
p(p
candidate
)
150.=η
·
p(obs
type
,obs
color
|hd
type
,hd
color
)
·
p(p
candidate
)
151.=η
·
p(obs
type
|hd
type
)
·
p(obs
color
|hd
color
)
·
p(p
candidate
)
152.p(p
candidate
|obs)用于表征图像中的车道线信息为obs时,候选位置p
candidate
为实际位置的概率,η为归一化系数。p(obs|p
candidate
)用于表征车辆位于p
candidate
时,车辆视觉设备输出的图像中的车道线信息为obs的概率,p(p
candidate
)用于表征车载终端将位置p
candidate
确
定为候选位置的概率,p(obs
type
,obs
color
|hd
type
,hd
color
)用于表征获取的车道线信息为高精地图中的hd
type
,hd
color
时,图像中的车道线信息为obs
type
,obs
color
的概率。p(obs
type
|hd
type
)用于表征获取的车道线类型为高精地图中的hd
type
时,图像中的车道线类型为obs
type
的概率,p(obs
color
|hd
color
)用于表征获取的车道线颜色为高精地图中的hd
color
时,图像中的车道线信息为obs
color
的概率。
153.步骤316,根据实际位置更新横向移动距离。
154.可以将概率值最高的候选位置作为车辆所在的实际位置,可以根据该实际位置更新车辆的横向移动距离,从而得到更加准确的车辆从上一时刻到当前时间在横向的移动距离。
155.具体的,更新了横向移动距离后,车载终端还可以根据更新后的横向移动距离更新车辆当前时刻的位置姿态,从而得到更加准确的定位结果。
156.步骤317,若置信度表征定位结果有效,则获取预设的车速补偿信息、航向角变化率补偿信息。
157.进一步的,若车载终端获取的定位结果的置信度表征该定位结果有效,则车载终端可以基于预设的补偿信息对该定位结果进行修正,具体可以获取预设的车速补偿信息、航向角变化率补偿信息。
158.实际应用时,可以预先设置车速与车速补偿信息的对应关系,还可以设置车速与航向角变化率补偿信息间的对应关系。
159.由于各种原因,自动驾驶车的车身传感器会输出带有噪音的车速数据和航向角变化率数据,而在忽略随机误差带来的影响条件因素下,可以通过分析,计算出传感器数据的固定误差。因此,可以预先设置车速与车速补偿信息的对应关系,还可以设置车速与航向角变化率补偿信息间的对应关系。
160.步骤318,获取车辆的实时速度,并利用预设的车速补偿信息对实时速度进行补偿,得到补偿后的车速。
161.其中,车载终端可以获取车辆的实时速度,并基于预设的车速补偿信息获取与该实时速度对应的速度补偿值,进而可以使用该速度补偿值对获取的实时速度进行补偿,从而得到补偿后的车速。
162.步骤319,获取车辆的航向角变化率,并利用预设的航向角变化率补偿信息对航向角变化率进行补偿,得到补偿后的航向角变化率。
163.具体的,预设的航向角变化率补偿信息中可以包括速度与航向角变化率补偿值的对应信息,因此,车载终端可以基于实时速度获取对应的航向角变化率补偿值,进而利用该航向角变化率补偿值对车辆的航向角变化率进行补偿。
164.步骤320,根据补偿后的车速、补偿后的航向角变化率确定车辆的行驶轨迹。
165.进一步的,车载终端可以获取车辆的上一刻位置,并利用根据补偿后的车速、补偿后的航向角变化率确定车辆的行驶轨迹。具体可以根据补偿后的车速、补偿后的航向角变化率确定车辆从上一刻位置到当前时刻的位移,进而可以在上一刻位置的基础上叠加车辆的位移,得到车辆的行驶轨迹。
166.图7为本技术一示例性实施例示出的确定行驶轨迹的装置的结构图。
167.如图7所示,本实施例提供的确定行驶轨迹的装置700,包括:
168.获取单元710,用于获取车辆中设置的组合导航系统输出的定位结果的置信度;
169.所述获取单元710还用于若所述置信度表征所述定位结果失效,则获取所述车辆的上一刻位置以及高精地图数据;
170.局部车道确定单元720,用于根据所述上一刻位置、所述高精地图数据确定局部车道线的信息;
171.所述获取单元710还用于获取所述车辆的实时速度;
172.轨迹确定单元730,用于根据所述局部车道线的信息、所述实时速度确定车辆的行驶信息,并根据所述行驶信息确定所述车辆的行驶轨迹,所述行驶轨迹用于确定所述车辆的位置。
173.本技术提供的确定行驶轨迹的装置与图1所示实施例类似,不再赘述。
174.图8为本技术另一示例性实施例示出的确定行驶轨迹的装置的结构图。
175.如图8所示,在上述实施例基础上,本实施例提供的确定行驶轨迹的装置,可选的,所述局部车道确定单元720,包括:
176.车道线获取模块721,用于根据所述车辆的上一刻位置,从所述高精地图数据中获取与所述上一刻位置的距离小于预设值的车道线信息;
177.局部地图生成模块722,用于根据获取的所述车道线的信息生成局部车道线地图;
178.方程构建模块723,用于根据所述局部车道线地图中每条车道线的位置信息、所述车辆的所述上一时刻位置,确定所述局部车道线地图中每一车道线的曲线方程。
179.可选的,所述方程构建模块723具体用于:
180.根据所述局部车道线地图中各车道线中包括的各车道线点的第一坐标、所述车辆的上一时刻位置,将各车道线点的第一坐标转换为车身坐标系中的第二坐标;其中,所述第一坐标为所述高精地图中的坐标系中的坐标;
181.基于各车道线点的第二坐标,对属于同一车道线的各车道线点进行拟合,得到所述局部车道线地图中各车道线的曲线方程。
182.可选的,其中,所述车道线的曲线方程中包括用于表征车辆与车道线距离的距离参数;
183.所述局部车道确定单元720还用于:
184.根据各车道线的曲线方程中包括的距离参数,确定所述车辆距离最近的车道线。
185.可选的,所述局部车道线的信息包括车道线的曲线方程;
186.所述轨迹确定单元730,包括:
187.位移确定模块731,用于根据所述实时速度、获取所述上一刻位置的时间与当前时间的时间差,确定所述车辆的位移;
188.行驶信息确定模块732,用于根据所述车辆的位移、距离所述车辆最近的车道线的曲线方程,确定所述车辆的行驶信息。
189.可选的,所述行驶信息确定模块732具体用于:
190.根据所述位移对距离所述车辆最近的车道线的曲线方程积分处理,得到所述车辆的横向移动距离、纵向移动距离、航向角增量。
191.可选的,所述轨迹确定单元730具体用于:
192.在所述车辆的所述上一时刻位置基础上叠加所述横向移动距离、纵向移动距离、
航向角增量,得到所述车辆当前时刻的位置姿态,其中,所述行驶轨迹包括所述车辆连续的位置姿态。
193.可选的,所述行驶信息包括车辆的航向角增量;
194.所述装置还包括车道线更新单元740,用于:
195.根据预设时长内的所述行驶信息中包括的各航向角增量确定所述车辆在预设时长内的横向偏移;
196.若所述横向偏移大于检测阈值,则根据所述车辆的各所述航向角确定所述车辆是否变道;
197.若确定所述车辆变道,则根据变道情况变更距离所述车辆最近的车道线。
198.可选的,所述车道线更新单元740具体用于:
199.根据预设时长内所述行驶信息中包括的各航向角增量,确定所述预设时长内所述车辆的各航向角;
200.获取预设时长内所述车辆的各车辆速度;
201.根据各所述航向角、各所述车辆速度确定所述车辆在预设时长内的横向偏移。
202.可选的,所述车道线更新单元740具体用于:
203.根据所述车辆的各所述航向角确定是否存在以下任一种情况:
204.弯道行驶情况、车身回正情况、存在异常的航向角;
205.若均不存在,则确定所述车辆在变道。
206.可选的,若在当前时刻所述车辆的车身方向与距离所述车辆最近的车道线的起点切线方向间的第一角度,与所述车辆的车身方向与距离所述车辆最近的车道线的终点切线方向间的第二角度之间的角度差值大于弯道角度阈值,且所述预设时长内相邻的航向角之间的角度差值小于所述弯道角度阈值,则确定所述车辆为弯道行驶情况;
207.其中,所述车身方向是根据各所述航向角确定的。
208.可选的,若在当前时刻所述车辆的车身方向与距离所述车辆最近的车道线的起点切线方向间的第一角度,与所述车辆的车身方向与距离所述车辆最近的车道线的终点切线方向间的第二角度之间的角度差值大于弯道角度阈值,且所述预设时长内相邻的航向角之间的角度差值大于所述弯道角度阈值,则确定存在异常的航向角;
209.其中,所述车身方向是根据各所述航向角确定的。
210.可选的,若检测到车辆连续两次疑似变道,且这两次疑似变道的方向相反,且这两次疑似变道的时间间隔小于车身回正窗口时间,则确定所述车辆为车身回正情况。
211.可选的,所述获取单元710还用于:
212.获取所述车辆中设置的视觉设备输出的图像,并在所述图像中识别车道线;
213.根据所述行驶信息,以所述车辆的视角从所述高精地图数据中获取车道线信息;
214.所述轨迹确定单元730包括:
215.比对模块733,用于比对所述图像中的车道线的信息与所述高精地图数据中获取的车道线的信息得到比对结果,根据所述比对结果确定所述车辆的实际位置;
216.更新模块734,用于根据所述实际位置更新所述横向移动距离;
217.相应的,所述轨迹确定单元730还用于根据更新后的横向移动距离更新所述车辆当前时刻的位置姿态。
218.可选的,所述比对模块733具体用于:
219.根据所述上一刻位置在每一车道中确定候选位置;
220.根据所述图像中的车道线与所述高精地图数据中的车道线,确定所述车辆处于每一候选位置的概率;
221.根据各所述概率确定所述车辆的实际位置。
222.可选的,所述比对模块733具体用于:根据所述上一时刻位置距离其所属车道两侧车道线的距离,确定每一车道中的所述候选位置;
223.其中,所述上一时刻位置距离其所述车道两侧车道线的距离的比例,与所述候选位置距离其所属车道两侧车道线的距离的比例相同。
224.可选的,所述获取单元710还用于若所述置信度表征所述定位结果有效,则获取预设的车速补偿信息、航向角变化率补偿信息;
225.所述装置还包括补偿单元750,用于:
226.获取所述车辆的实时速度,并利用预设的车速补偿信息对所述实时速度进行补偿,得到补偿后的车速;
227.获取所述车辆的航向角变化率,并利用预设的航向角变化率补偿信息对所述航向角变化率进行补偿,得到补偿后的航向角变化率;
228.所述轨迹确定单元730还用于:
229.根据补偿后的车速、补偿后的航向角变化率确定所述车辆的行驶轨迹。
230.本实施例提供的装置的具体原理和实现方式均与图3所示的实施例类似,此处不再赘述。
231.图9为本技术一示例性实施例示出的车载设备的结构图。
232.如图9所示,本实施例提供的车载设备包括:
233.存储器91;
234.处理器92;以及
235.计算机程序;
236.其中,所述计算机程序存储在所述存储器91中,并配置为由所述处理器92执行以实现如上所述的任一种确定行驶轨迹的方法。
237.本实施例还提供一种计算机可读存储介质,其上存储有计算机程序,
238.所述计算机程序被处理器执行以实现如上所述的任一种确定行驶轨迹的方法。
239.本实施例还提供一种计算机程序,包括程序代码,当计算机运行所述计算机程序时,所述程序代码执行如上所述的任一种确定行驶轨迹的方法。
240.本领域普通技术人员可以理解:实现上述各方法实施例的全部或部分步骤可以通过程序指令相关的硬件来完成。前述的程序可以存储于一计算机可读取存储介质中。该程序在执行时,执行包括上述各方法实施例的步骤;而前述的存储介质包括:rom、ram、磁碟或者光盘等各种可以存储程序代码的介质。
241.最后应说明的是:以上各实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述各实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术
方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1