信号同步装置、智能汽车、智慧基站及路侧感知单元的制作方法
1.本实用新型所涉及到技术领域为激光雷达与毫米波雷达的感知融合领域,具体来说是一种激光雷达触发毫米波雷达的信号同步装置、智能汽车、智慧基站及路侧感知单元。
背景技术:
2.随着中国汽车行业的快速发展,特别是自动驾驶、无人驾驶领域的飞速发展,越来越多的汽车装置了激光雷达、毫米波雷达、摄像头等传感器,这使得人们对于汽车更智能化、创新化、安全化的需求越来越大。无人驾驶的底层支撑主要分为三个部分:传感器、高精地图和计算平台。在传感器方面,现主流的传感器分为激光雷达、毫米波雷达和摄像头。
3.现市面上的激光雷达与毫米波雷达之间由于系统不同源,因此感知目标的方法和技术手段不同,对目标的探测能力也有较大差异,受环境的影响因素也有较大的不同。因此如何实现激光雷达与毫米波雷达两个系统之间的时间同步,保障两个系统在同一时间采集被测目标的特征信息,是一个亟待解决的问题。
技术实现要素:
4.本实用新型实施例提供了一种激光雷达触发毫米波雷达的信号同步装置,旨在解决在同一时间采集被测目标特征信息时,激光雷达和毫米波雷达信号时间不同步的问题。
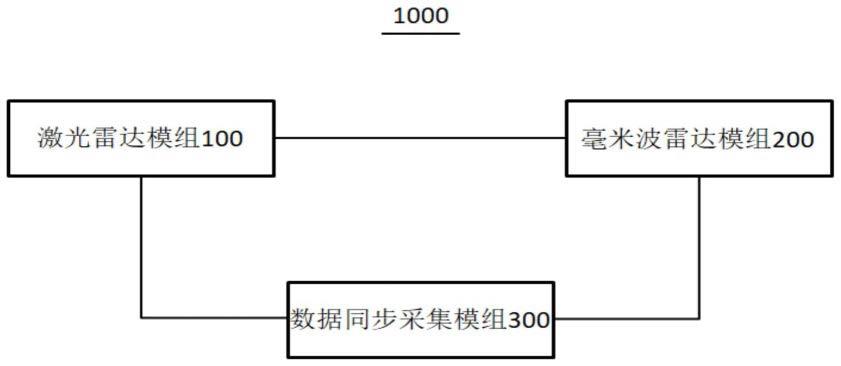
5.本实用新型的目的是,提供一种激光雷达触发毫米波雷达的信号同步装置,包含激光雷达模组、毫米波雷达模组和数据同步采集模组;
6.所述激光雷达模组的第一端连接所述毫米波雷达模组的第一端,用于通过所述激光雷达模组输出的触发信号触发所述毫米波雷达模组;
7.所述数据同步采集模组的第一端和第二端分别连接所述激光雷达模组的第二端和所述毫米波雷达模组的第二端,用于通过所述数据同步采集模组同步所述激光雷达模组和所述毫米波雷达模组的采集数据。
8.可选地,所述触发信号为io电平信号。
9.可选地,所述激光雷达模组包含激光雷达脉冲信号发射控制单元和激光雷达脉冲信号发射io端口单元,所述激光雷达脉冲信号发射控制单元的第一端连接所述激光雷达脉冲信号发射io端口单元的第一端,所述激光雷达脉冲信号发射io端口单元的第二端为所述激光雷达模组的第一端,用于通过所述激光雷达脉冲信号发射io端口单元向所述毫米波雷达模组输出所述触发信号。
10.可选地,所述毫米波雷达模组包含毫米波雷达发射信号控制单元和毫米波雷达脉冲信号接收io端口单元,所述毫米波雷达发射信号控制单元的第一端连接所述毫米波雷达脉冲信号接收io端口单元的第一端,所述毫米波雷达脉冲信号接收io端口单元的第二端为所述毫米波雷达模组的第一端,用于通过所述毫米波雷达脉冲信号接收io端口单元接收所述触发信号。
11.可选地,所述激光雷达模组的第一端通过io同步信号线连接所述毫米波雷达模组
的第一端。
12.可选地,所述激光雷达模组中的激光雷达包含机械旋转激光雷达、混合固态激光雷达、纯固态激光雷达中的至少一种。
13.可选地,所述毫米波雷达模组中的毫米波雷达包含24ghz毫米波雷达、60ghz毫米波雷达、77ghz毫米波雷达中的至少一种。
14.可选地,所述数据同步采集模组为工控机、电脑或者数据采集卡。
15.本实用新型还提供了一种智能汽车,包含如上所述的激光雷达触发毫米波雷达信号同步装置。
16.本实用新型还提供了一种智慧基站,包含如上所述的激光雷达触发毫米波雷达信号同步装置。
17.本实用新型还提供了一种路侧感知单元,包含如上所述的激光雷达触发毫米波雷达信号同步装置。
18.本实用新型的有益效果在于,激光雷达模组发射扫描信号,在激光雷达模组检测到目标信号的起始时刻,或者是当激光雷达模组已经确定了目标的坐标位置之后,当激光雷达模组再次扫描到待测目标的坐标位置的时刻,输出触发信号。毫米波雷达模组收到触发信号之后,向指定区域发射调频连续波信号,以此实现两者之间的时间同步。该激光雷达触发毫米波雷达信号同步装置结构简单、稳定、可靠,适用性强,需求量大,有较广阔的应用前景。
附图说明
19.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
20.图1为本实用新型实施例提供的一种激光雷达触发毫米波雷达的信号同步装置的第一示意图;
21.图2为本实用新型实施例提供的一种激光雷达触发毫米波雷达的信号同步装置的第二示意图;
22.附图标号说明:激光雷达触发毫米波雷达的信号同步装置1000、激光雷达模组100、毫米波雷达模组200、数据同步采集模组300、激光雷达脉冲信号发射控制单元110、激光雷达脉冲信号发射io端口单元120、毫米波雷达发射信号控制单元220、毫米波雷达脉冲信号接收io端口单元210、数据同步采集单元310。
具体实施方式
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
24.本实用新型提供了一种激光雷达触发毫米波雷达的信号同步装置。
25.如图1所示,在本实施例中,激光雷达触发毫米波雷达的信号同步装置1000包含激光雷达模组100、毫米波雷达模组200和数据同步采集模组300。激光雷达模组100的第一端连接毫米波雷达模组200的第一端,用于通过所述激光雷达模组100输出的触发信号触发毫米波雷达模组200;数据同步采集模组300的第一端和第二端分别连接激光雷达模组100的第二端和毫米波雷达模组200的第二端,用于通过数据同步采集模组300同步激光雷达模组100和毫米波雷达模组200的采集数据。其中,触发信号可以为io电平信号等,以下将以触发信号是io电平信号为例进行介绍。
26.具体而言,随着车联网的迅速发展,汽车上通常会安装各种传感器模组如激光雷达模组100和毫米波雷达模组200,以此让汽车迅速地感知周围环境,尽可能的避免不必要的交通事故,给驾驶者提供一个更安全、舒适的行车环境。但与此同时,两种传感器都有明显的优缺点。激光雷达虽然探测范围广,测距精度高,但穿透性差,受环境影响严重;毫米波雷达虽然穿透性强,全天候不易受环境影响,但目标识别难度较大,无法感知行人,且探测距离受到频段损耗的直接制约。
27.而激光雷达触发毫米波雷达信号同步装置1000中的激光雷达模组100检测到目标之后,输出io电平信号,当前发射脉冲信号的回波信号数据,作为激光雷达同步数据传输到数据同步采集模组300。当毫米波雷达模组200接收到激光雷达输出的io电平信号之后,当前发射的调频连续波信号的回波信号接收数据,作为毫米波雷达同步数据传输到数据同步采集模组300。可选地,在本实施例中,激光雷达模组100的第一端可以通过io同步信号线连接毫米波雷达模组200的第一端,数据同步采集模组300通过激光雷达模组100触发毫米波雷达模组200的io同步信号线,在同一时刻对检测目标进行检测,并采集检测目标的数据信息,实现激光雷达与毫米波雷达的信号同步。因此通过实现激光雷达和毫米波雷达之间的融合,发挥其各自的系统优势共同感知目标,将极大地提升感知目标的准确性和可靠性。
28.本实用新型的有益效果在于,激光雷达模组100发射扫描信号,在激光雷达模组100检测到目标信号的起始时刻,或者是当激光雷达模组100已经确定了目标的坐标位置之后,当激光雷达模组100再次扫描到待测目标的坐标位置的时刻,输出触发信号。毫米波雷达模组200收到触发信号之后,向指定区域发射调频连续波信号,以此实现两者之间的时间同步。该激光雷达触发毫米波雷达信号同步装置1000结构简单、稳定、可靠,适用性强,需求量大,有较广阔的应用前景。
29.可选地,如图2所示,在本实施例中,激光雷达模组100包含激光雷达脉冲信号发射控制单元110和激光雷达脉冲信号发射io端口单元120,激光雷达脉冲信号发射控制单元110的第一端连接激光雷达脉冲信号发射io端口单元120的第一端,激光雷达脉冲信号发射io端口单元120的第二端为激光雷达模组100的第一端,用于通过激光雷达脉冲信号发射io端口单元120向毫米波雷达模组200输出所述触发信号。
30.具体而言,激光雷达脉冲信号发射控制单元110可以采用fpga芯片(如max10),发射激光雷达检测脉冲信号,并根据接收回波来检测目标。激光雷达模组100检测到的目标信号,包含目标的距离、目标相对于激光雷达的x、y、z方向的角度等信息。而激光雷达脉冲信号发射io端口单元120包括fpga芯片引出的io引脚、二极管(如udd32c)、空气放电管(如3r-5-ss)、隔离芯片(如tl331),fpga芯片引出的io引脚通过二极管、空气放电管、隔离芯片等器件之后,输出io电平信号,并将当前发射脉冲信号的回波信号数据,作为激光雷达同步数
据传输到数据同步采集模组300。其工作原理为fpga在控制激光管发射激光脉冲信号之后,通过激光雷达脉冲信号发射io端口单元120输出脉冲宽度为10us的同步信号。
31.同样地,如图2所示,在本实施例中,毫米波雷达模组200包含毫米波雷达发射信号控制单元210和毫米波雷达脉冲信号接收io端口单元220,毫米波雷达发射信号控制单元210的第一端连接毫米波雷达脉冲信号接收io端口单元220的第一端,毫米波雷达脉冲信号接收io端口单元220的第二端为毫米波雷达模组200的第一端,用于通过毫米波雷达脉冲信号接收io端口单元220接收触发信号。
32.具体而言,毫米波雷达发射信号控制单元210可以采用iwr1843芯片,毫米波雷达脉冲信号接收io端口单元220可以包括二极管(如udd32c)、空气放电管(如3r-5-ss)、隔离芯片(如tl331)等器件,激光雷达脉冲信号发射io端口单元120通过线缆传输连接到毫米波雷达脉冲信号接收io端口单元220,毫米波雷达脉冲信号接收io端口单元220接收激光雷达模组100输出的io电平信号,通过二极管(如udd32c)、空气放电管(如3r-5-ss)、隔离芯片(如tl331)等器件之后,将其传输到毫米波雷达模组200的io引脚,io引脚是属于毫米波雷达发射信号控制单元210芯片的功能io。与此同时,当毫米波雷达发射信号控制单元210接收到激光雷达模组100的io电平信号后,发射调频连续波信号,根据回波信号检测目标,并将当前发射的调频连续波信号的回波信号接收数据,作为毫米波雷达同步数据传输到数据同步采集模组300。
33.激光雷达脉冲信号与毫米波雷达信号之间各自使用自己的系统时间,通过io电平信号的触发,保障激光雷达和毫米波雷达两个系统在检测目标的同一时刻发射信号(相对同时,误差间隔小于10ns);由于系统差异,激光雷达检测目标需要通过发射多次脉冲信号之后,才能获取到目标特征,但是每次发射脉冲信号的时间间隔很短;毫米波雷达在发射一次调频连续波信号之后,就可以获取到目标的各类信息,但是每一个调频连续波的持续时间较激光雷达的脉冲时间长很多。由于上述系统的差异,因此,在检测目标的过程中,相对的时间间隔误差,对信号同步以及提升对感知目标的准确度和可靠度不会造成偏差。
34.当激光雷达模组100检测到目标之后,通过激光雷达脉冲信号发射io端口单元120,输出io电平信号之后,当前发射脉冲信号的回波信号数据,作为激光雷达同步数据传输到数据同步采集模组300,可选地,激光雷达模组100还可以包括激光雷达数据处理单元(未在图中示出),激光雷达数据处理单元的第一端连接激光雷达脉冲信号发射控制单元110的第二端,激光雷达数据处理单元的第二端为激光雷达模组100的第二端,激光雷达同步数据通过激光雷达数据处理单元传输到数据同步采集模组300。
35.当毫米波雷达模组200通过毫米波雷达脉冲信号接收io端口单元220,接收到激光雷达模组100输出的io电平信号之后,当前发射的调频连续波信号的回波信号接收数据,作为毫米波雷达同步数据传输到数据同步采集模组300,可选地,毫米波雷达模组200还可以包括毫米波雷达数据处理单元(未在图中示出),毫米波雷达数据处理单元的第一端连接毫米波雷达发射信号控制单元210的第二端,毫米波雷达数据处理单元的第二端为毫米波雷达模组200的第二端,毫米波雷达同步数据通过毫米波雷达数据处理单元传输到数据同步采集模组300。
36.可选地,在本实施例中,激光雷达模组100中的激光雷达的个数可以是一个或者多个,并且,激光雷达模组100中的激光雷达可以包含机械旋转激光雷达、混合固态激光雷达、
纯固态激光雷达中的至少一种。
37.可选地,在本实施例中,毫米波雷达模组200中的激光雷达的个数可以是一个或者多个,并且,毫米波雷达模组200中的毫米波雷达可以包含24ghz毫米波雷达、60ghz毫米波雷达、77ghz毫米波雷达中的至少一种。
38.可选地,在本实施例中,数据同步采集模组300可以是工控机、电脑、数据采集卡等其中的一种设备,且数据同步采集单元包含有数据存储介质,包含有高速数据传输的通道(如光纤、网口、高速串口等)。
39.本实用新型还提供了一种智能汽车,包含本实用新型所提供的激光雷达触发毫米波雷达信号同步装置。
40.本实用新型还提供了一种智慧基站或路侧感知单元,包含本实用新型所提供的激光雷达触发毫米波雷达信号同步装置。
41.本实用新型中应用了具体实施例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想;同时,对于本领域的一般技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本实用新型的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1