连续式旋转圆柱自动驾驶汽车激光雷达振镜及其旋转机构的制作方法
1.本实用新型属于激光扫描领域,具体涉及连续式旋转圆柱自动驾驶汽车激光雷达振镜及其旋转机构。
背景技术:
2.二十一世纪以来,伴随着物联网、集成电路以及人工智能的发展,无人驾驶技术已经成为智能汽车领域的重要环节,这一技术实现的关键就是对汽车周围环境进行精确感知,而障碍探测技术对环境感知起基础决定性作用,因此,深入研究障碍物测量方法对于无人驾驶技术的发展意义重大。
3.常用的车辆障碍物探测手段主要有高精度摄像头系统、毫米波雷达以及激光雷达等。激光雷达是利用特定波长的激光信号对障碍物表面进行主动式扫描来获取障碍物表面信息,因此其不易受环境光的影响,抗干扰能力强,具有良好方向性以及相干性,可以实现高精度测量,因此激光雷达技术在障碍探测以及环境重建方面具有明显的优势。在进行测量时,一般采用扫描式激光雷达对障碍物进行二维或三维测量,其探测机理主要是以激光作为辐射源对目标障碍物进行高精度距离测量,以便车辆及时有效地规避障碍物。
4.目前应用于无人驾驶车的激光雷达研究多以扫描式激光雷达为主,以脉冲激光测距作为主要障碍物探测方式,但是其普遍存在研发成本高、系统复杂并且测量精度难以提高的不足,系统稳定性差。因此,在此基础上,研究并设计低成本、集成度高并且可以实现高精度测量的激光雷达系统对于无人驾驶技术的发展意义重大。而影响扫描式激光雷达性能的关键元器件就是扫描用的振镜。现有的振镜为往复振动平面反射镜,这种结构对电机精度要求极高,并且稳定性较差,由于振镜运动特点的限制,扫描场会存在一定的变形。
技术实现要素:
5.为了弥补现有技术的不足,本实用新型提供一种连续式旋转圆柱自动驾驶汽车激光雷达振镜及其旋转机构的技术方案。
6.本实用新型提供一种连续式旋转圆柱自动驾驶汽车激光雷达振镜,包括螺旋反射镜,所述螺旋反射镜的外表面具有沿其螺旋结构设置的激光照射螺旋线,所述激光照射螺旋线的每一个反射点具有一法向向量,设定一激光照射位置,设定反射点位于激光照射位置时的法向向量为照射法向向量,激光照射螺旋线上所有反射点中至少有四种方向不同的照射法向向量,使得振镜在工作状态接受激光器照射时,反射出的扫描点呈阵列排布。
7.进一步地,所述激光照射螺旋线上所有反射点的照射法向向量方向均不相同。
8.进一步地,所述激光照射螺旋线为等直径螺旋线。
9.进一步地,所述激光照射螺旋线为等螺距螺旋线。
10.进一步地,所述激光照射螺旋线为等直径等螺距螺旋线。
11.进一步地,所述螺旋反射镜相邻圈层之间紧密排布,使得螺旋反射镜构成圆柱形镜面。
12.进一步地,所述振镜还包括支撑体,所述螺旋反射镜设置于支撑体上。
13.进一步地,所述螺旋反射镜绕设于支撑体上。
14.进一步地,所述支撑体为圆柱形结构。
15.与现有技术相比,本实用新型提供的连续式旋转圆柱自动驾驶汽车激光雷达振镜中激光照射螺旋线的每个反射点的法向向量都单独进行设计,这样就解决了传统振镜扫描变形的问题,同时,振镜的转动可以很方便的控制为匀速运动,振镜与激光器的相对运动可以很方便地控制为匀速运动,这样能够有效地解决扫描点阵分布不均匀的问题,而且也使得振镜的驱动结构更加简单且可靠,极大的降低了整体的制造成本。
16.本实用新型还提供一种连续式旋转圆柱自动驾驶汽车激光雷达振镜旋转机构,包括如上所述的振镜及用以驱动振镜旋转的旋转驱动装置。
17.本实用新型提供的一种连续式旋转圆柱自动驾驶汽车激光雷达振镜旋转机构包含了上述的振镜,由于振镜的结构及其有益效果在上述文字中已经有所描述,因此不再赘述。
附图说明
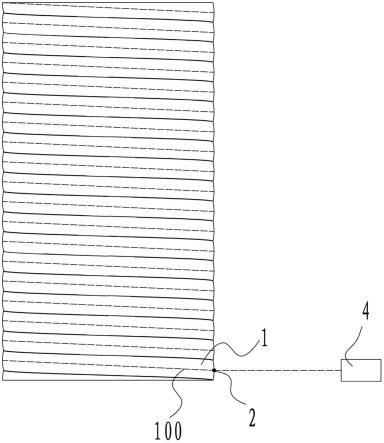
18.图1为实施例1与激光器配合使用时的结构示意图之一;
19.图2为实施例1与激光器配合使用时的结构示意图之二;
20.图3为本实施例1中反射点的光路示意图;
21.图4为实施例1使用时的激光扫描点阵示意图;
22.图5为实施例2结构示意图。
23.图中:1是螺旋反射镜;100是激光照射螺旋线;2是激光照射位置;3是支撑体;4是激光器;5是旋转驱动装置;n是反射单元组的圈数;m是单个反射单元组中反射单元的个数;r是入射激光方向;i是出射激光方向;n是照射法向向量。
具体实施方式
24.在本实用新型的描述中,需要理解的是,术语“一端”、“另一端”、“外侧”、“上”、“内侧”、“水平”、“同轴”、“中央”、“端部”、“长度”、“外端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
25.下面结合附图对本实用新型作进一步说明。
26.实施例1
27.请参阅图1-4,连续式旋转圆柱自动驾驶汽车激光雷达振镜,包括螺旋反射镜1,所述螺旋反射镜1的外表面具有沿其螺旋结构设置的激光照射螺旋线100,所述激光照射螺旋线100的每个点都为反射点,每一个反射点具有一法向向量,设定一激光照射位置2,该激光照射位置2代表激光器4照射在螺旋反射镜1上的位置,本实施例能够通过旋转和与激光器4的相对上下移动使激光照射螺旋线100上每一个反射点都达到激光照射位置2,设定反射点位于激光照射位置2时的法向向量为照射法向向量,激光照射螺旋线100上所有反射点中至少有四种方向不同的照射法向向量,使得振镜在工作状态接受激光器4照射时,反射出的扫
描点呈阵列排布。
28.作为优化,所述激光照射螺旋线100上所有反射点的照射法向向量方向均不相同。
29.可以理解,这样的设置使得本实施例所有发射点都对应一个扫描点,扫描效果更好。
30.进一步参阅图1,所述激光照射螺旋线100为等直径等螺距螺旋线。
31.可以理解,等直径等螺距螺旋线更有规律,便于振镜的设计和制造。
32.继续参阅图2,所述振镜还包括支撑体3,所述螺旋反射镜1设置于支撑体3上。其中,支撑体3为圆柱形结构,螺旋反射镜1绕设于支撑体3表面上。本实施例中的螺旋反射镜1可以为一整条反射平面镜,其可以固定贴覆于支撑体3表面。
33.继续参阅图2,本实施例中的螺旋反射镜1优选为相邻圈层之间紧密排布的结构,相邻圈层之间没有间隙,也就是说螺旋反射镜1中每个圈层的宽度等于其螺距,使得整个螺旋反射镜1构成一整体的圆柱镜面。此外,螺旋反射镜1中每个圈层的宽度也可以设计成小于螺距,这样螺旋反射镜1不同圈层之间形成间隙。
34.在本实施例中,激光器4与振镜的相对移动速度v,振镜的角速度w,激光照射螺旋线100的螺距h,满足以下关系式:h/v=2π/w,这样能够使激光器4发出的激光正好沿着激光照射螺旋线100作相对移动。
35.本实施例通过计算激光器4的位置和对应需要扫描的角度得到激光照射螺旋线100上的各反射点的法向向量,通过将这些各点拟合最终得到螺旋反射镜的连续变化的自由反射曲面。具体地,反射点通过计算激光器4的位置和对应需要扫描的角度得到反射点在镜面上的法向向量方向,所有反射点都以这样的计算方法得到。
36.激光照射螺旋线100上每个反射点的法向向量计算方法如下:
37.根据公式(1)计算得到反射点的照射法向向量n,根据反射单元1的照射法向向量n得到反射单元1的反射面,
[0038][0039]
其中,向量i表示入射激光方向,向量r表示出射激光方向,向量i和向量r根据激光器位置,反射单元和扫描点的位置得到。
[0040]
使用时,振镜以一定的角速度旋转,激光器4也以一定的频率发射激光,同时激光器4以一定的速度上下移动,或者振镜以一定的速度上下移动,只要激光器4与振镜发生相对匀速相对运动即可,振镜转动与激光器4移动配合,当激光器4发射激光时,激光能够正好移动到螺旋反射镜1的激光照射螺旋线100上,并且激光的照射点会沿着激光照射螺旋线100作相对移动。当反射点的照射法向向量方向不同时,激光反射方向也不相同,这样扫描点的位置也不同,所有的扫描点都能够被激光器4照射到,每个反射点都能够反射出一个扫描点,本实施例所有的反射点正好对应一个扫描矩阵,以此实现振镜的偏转效果。
[0041]
由于本实施例的振镜能够对每个反射点单独进行设计,相应的也就能够对反射点反射出的扫描点方向进行单独设计,通过设计使得这些扫描点投射到同一个平面上时等间距排布,避免变形。
[0042]
实施例2
[0043]
请参阅图5,连续式旋转圆柱自动驾驶汽车激光雷达振镜旋转机构,包括如上所述的振镜及用以驱动振镜旋转的旋转驱动装置5。其中旋转驱动装置5可以采用电机及其相应
的传动结构。
[0044]
可以理解,旋转驱动装置5能够实现振镜的自转,使振镜上不同的反射点来到激光照射位置2接收激光照射。
[0045]
最后应说明的是:以上各实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1