一种振动测量装置及方法与流程
1.本技术涉及振动测量技术领域,尤其涉及一种振动测量装置及方法。
背景技术:
2.物体发生机械振动的方式通常是简谐振动,振动物体上的质点偏离原点(该质点在静止状态下的位置)的距离随时间的函数通常为正弦函数或余弦函数,现有技术中通常采用加速度传感器测量法来测量待测物体的振动参数(通常包括振幅和振动频率),即把加速度传感器固定在待测物体上,然后将加速度传感器与计算机连接,加速度传感器将检测到的振动信号传输至计算机中,计算机对振动信号进行计算获得待测物体的振动参数。采用加速度传感器来测量振动参数,虽然测量精度高,但是加速度传感器通常难以看出是否存在故障,导致测量结果的可靠性存疑,因此,急需一种更为直观的测量方法对待测物体进行测量,使获得的测量结果更加可靠。
技术实现要素:
3.本技术提供一种振动测量装置及方法,能够直观的测量待测物体的振动参数,提高测量结果的可靠性。
4.为实现上述目的,本技术的第1方面提供了一种振动测量方法,包括如下步骤:在待测物体上固定两个激光器,两个所述激光器朝向正交设置;在所述待测物体外设置两个幕板,两个所述幕板的法向分别与两个所述激光器的朝向平行,两个所述幕板分别用于接收两个所述激光器的光束照射生成光斑;采集两个所述幕板上的光斑运动轨迹;根据所述光斑运动轨迹确定待测物体的振动参数。
5.在第1方面的一些实施方式中,所述采集两个所述幕板上的光斑运动轨迹包括:在其中一个所述幕板上建立平面直角坐标系xoz,在另一个所述幕板上建立平面直角坐标系yoz,z轴与两个所述激光器朝向垂直。
6.在第1方面的一些实施方式中,所述采集两个所述幕板上的光斑运动轨迹包括:根据式(1)建立所述光斑运动轨迹方程,f(t)=(x(t),y(t),z(t))
ꢀꢀꢀ
(1),在式(1)中,t为时间参数,f(t)为所述光斑运动轨迹方程,x(t)为光斑在x轴上的坐标值随时间t的函数,y(t)为光斑在y轴上的坐标值随时间t的函数,z(t)为光斑在z轴上的坐标值随时间t的函数,x轴与其中一个所述激光器的朝向平行,y轴与另一个所述激光器的朝向平行。
7.在第1方面的一些实施方式中,所述采集两个所述幕板上的光斑运动轨迹包括:用两个图像采集装置分别采集两个所述幕板上的光斑图像信息,并将所述光斑图像信息传输到处理装置中进行计算确定所述光斑运动轨迹方程。
8.在第1方面的一些实施方式中,所述根据所述光斑运动轨迹确定待测物体的振动
参数包括:根据所述光斑运动轨迹方程确定光斑最大坐标值和光斑最小坐标值,根据所述光斑最大坐标值和所述光斑最小坐标值确定所述待测物体的振幅。
9.在第1方面的一些实施方式中,所述根据所述光斑运动轨迹确定待测物体的振动参数包括:根据式(2)确定所述振幅,在式(2)中,a为振幅,xmax为光斑在x轴上的最大坐标值,ymax为光斑在y轴上的最大坐标值,zmax为光斑在z轴上的最大坐标值,xmin为光斑在x轴上的最小坐标值,ymin为光斑在y轴上的最小坐标值,zmin为光斑在z轴上的最小坐标值。
10.在第1方面的一些实施方式中,所述根据所述光斑运动轨迹确定待测物体的振动参数包括:根据所述光斑运动轨迹方程确定光斑在所述光斑最大坐标值和所述光斑最小坐标值之间的光斑往返时长,根据所述光斑最大坐标值和所述光斑最小坐标值以及所述光斑往返时长确定所述待测物体的振动频率。
11.在第1方面的一些实施方式中,所述根据所述光斑运动轨迹确定待测物体的振动参数包括:根据式(3)确定所述振动频率,f=1
÷
t(3),在式(3)中,f为振动频率,t为所述光斑往返时长。
12.本技术的第2方面提供了一种振动测量装置,包括:第一激光器、第二激光器,用于正交设置并发射激光束;固定板,用于固定安装在待测物体上,所述第一激光器和所述第二激光器固定在所述固定板上;第一幕板、第二幕板,分别用于接收所述第一激光器和所述第二激光器发射的激光束,并在所述第一幕板和所述第二幕板上分别形成光斑;l形透明板,用于固定所述第一幕板和所述第二幕板;第一图像采集装置、第二图像采集装置,固定在所述l形透明板上,分别用于采集所述第一幕板和所述第二幕板上的光斑图像信息;处理装置,分别与所述第一图像采集装置以及所述第二图像采集装置连接,用于对所述光斑图像信息进行处理生成光斑运动轨迹,并根据所述光斑运动轨迹确定待测物体的振动参数。
13.在第2方面的一些实施方式中,所述第一幕板上设有平面直角坐标系xoz,所述第二幕板上设有平面直角坐标系yoz,所述第一幕板和所述第二幕板上均设有成矩形阵列排布的透光孔。
14.本技术具有如下有益效果:通过创建正交光束、生成光斑、采集光斑运动轨迹、根据光斑运动轨迹确定振动参数,只需要将激光器正交固定在待测物体上,并在待测物体外设置两个幕板以接收光束,在
幕板上形成光斑,待测物体振动时带动激光器一起运动,光斑随着待测物体的振动在幕板上移动形成光斑运动轨迹,通过采集光斑的运动轨迹就能够测量出光斑的运动幅度和往复运动频率,光斑的运动幅度即待测物体的振幅,光斑的往复运动频率即待测物体的振动频率。激光器产生的激光束可以被直观的观测到,幕板上的光斑也能够直观的观测到,幕板设于待测物体外部避免受到待测物体振动的扰动,通过直观的测量方法,能够轻易判断测量过程和采用的部件是否存在问题,使测量结果更加可靠。
附图说明
15.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
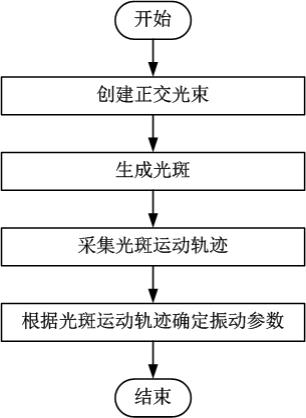
16.图1是本技术实施例中振动测量方法的流程示意图;图2是本技术实施例中振动测量装置的俯视图;图3是本技术实施例中振动测量装置的主视图;图4是本技术实施例中振动测量装置的左视图;图5是本技术实施例中第一幕板的结构示意图;图6是本技术实施例中第二幕板的结构示意图;图7是本技术实施例中光斑在第一幕板上透过通孔时的结构示意图;图8是本技术实施例中光斑在第一幕板上运动至最大坐标值时的结构示意图;图9是本技术实施例中光斑运动轨迹分别在x、y、z轴上的图像结构示意图;图10是本技术实施例中光斑运动轨迹方程图像的结构示意图;图11是本技术实施例中根据光斑运动轨迹方程确定振动参数的原理结构示意图。
17.附图标记:100、待测物体;200、固定板;310、第一激光器;320、第二激光器;410、第一幕板;420、第二幕板;500、l形透明板;610、第一图像采集装置;620、第二图像采集装置;700、计算机;800、通孔。
具体实施方式
18.下面结合附图和实施例对本技术的实施方式作进一步详细描述,本技术的实施方式部分使用的术语仅用于对本技术的具体实施例进行解释,而非旨在限定本技术。
19.如图1所示,在本技术的实施例1中,提供了一种振动测量方法,包括如下步骤:创建正交光束,在待测物体100上固定两个激光器,两个所述激光器朝向正交设置;生成光斑,在所述待测物体100外设置两个幕板,两个所述幕板的法向分别与两个所述激光器的朝向平行,两个所述幕板分别用于接收两个所述激光器的光束照射生成光斑;采集两个所述幕板上的光斑运动轨迹;根据所述光斑运动轨迹确定待测物体100的振动参数。
20.通过创建正交光束、生成光斑、采集光斑运动轨迹、根据光斑运动轨迹确定振动参数,只需要将激光器正交固定在待测物体100上,并在待测物体100外设置两个幕板以接收光束,在幕板上形成光斑,待测物体100振动时带动激光器一起运动,光斑随着待测物体100的振动在幕板上移动形成光斑运动轨迹,通过采集光斑的运动轨迹就能够测量出光斑的运动幅度和往复运动频率,光斑的运动幅度即待测物体100的振幅,光斑的往复运动频率即待测物体100的振动频率。激光器产生的激光束可以被直观的观测到,幕板上的光斑也能够直观的观测到,幕板设于待测物体100外部避免受到待测物体100振动的扰动(幕板处于静止状态),通过直观的测量方法,能够轻易判断测量过程和采用的部件是否存在问题,使测量结果更加可靠。
21.结合图2至图11所示,在实施例1的一些实施方式中,所述采集两个所述幕板上的光斑运动轨迹包括:在其中一个所述幕板上建立平面直角坐标系xoz(如图5所示),在另一个所述幕板上建立平面直角坐标系yoz(如图6所示),z轴与两个所述激光器朝向垂直。
22.在实施例1的一些实施方式中,所述采集两个所述幕板上的光斑运动轨迹包括:根据式(1)建立所述光斑运动轨迹方程,f(t)=(x(t),y(t),z(t))
ꢀꢀꢀ
(1),在式(1)中,t为时间参数,f(t)为所述光斑运动轨迹方程,x(t)为光斑在x轴上的坐标值随时间t的函数,y(t)为光斑在y轴上的坐标值随时间t的函数,z(t)为光斑在z轴上的坐标值随时间t的函数,x轴与其中一个所述激光器的朝向平行,y轴与另一个所述激光器的朝向平行。
23.在实施例1的一些实施方式中,所述采集两个所述幕板上的光斑运动轨迹包括:用两个图像采集装置分别采集两个所述幕板上的光斑图像信息,并将所述光斑图像信息传输到处理装置中进行计算确定所述光斑运动轨迹方程。
24.通过上述实施方式,通过采集光斑分别在第一幕板410和第二幕板420上的图像信息,分别建立光斑运动轨迹分别在x、y、z轴上的图像(如图9所示),根据光斑在x轴上的坐标值随时间t的函数、光斑在y轴上的坐标值随时间t的函数、光斑在z轴上的坐标值随时间t的函数确定光斑运动轨迹方程。
25.在实施例1的一些实施方式中,所述根据所述光斑运动轨迹确定待测物体100的振动参数包括:根据所述光斑运动轨迹方程确定光斑最大坐标值和光斑最小坐标值,根据所述光斑最大坐标值和所述光斑最小坐标值确定所述待测物体100的振幅。
26.如图10和图11所示,光斑最大坐标值为光斑运动轨迹方程图像的波峰纵坐标(纵坐标是指在坐标轴f(t)上的坐标值),光斑最小坐标值为光斑运动轨迹方程图像的波谷纵坐标,待测物体100处于静止时,调整模板的位置,使光斑处于模板上的平面直角坐标系的原点o上,待测物体100振动过程中做简谐运动,其振动的波形图为正弦曲线或余弦曲线,光斑最大坐标值记为a,光斑最小坐标值记为-a,振幅即为a,光斑往返时长即为振动周期t。
27.在实施例1的一些实施方式中,所述根据所述光斑运动轨迹确定待测物体100的振动参数包括:根据式(2)确定所述振幅,
在式(2)中,a为振幅,xmax为光斑在x轴上的最大坐标值,ymax为光斑在y轴上的最大坐标值,zmax为光斑在z轴上的最大坐标值,xmin为光斑在x轴上的最小坐标值,ymin为光斑在y轴上的最小坐标值,zmin为光斑在z轴上的最小坐标值。
28.通过上述实施方式,待测物体100在x、y、z轴上的正向振幅分别为xmax、ymax、zmax,待测物体100在x、y、z轴上的负向振幅分别为xmin、ymin、zmin,由空间两点之间的距离公式可知,光斑处于光斑最大坐标值时的位置与光斑处于光斑最小坐标值时的位置之间的距离为,振幅为该距离的一半即:。
29.在实施例1的一些实施方式中,所述根据所述光斑运动轨迹确定待测物体100的振动参数包括:根据所述光斑运动轨迹方程确定光斑在所述光斑最大坐标值和所述光斑最小坐标值之间的光斑往返时长,根据所述光斑最大坐标值和所述光斑最小坐标值以及所述光斑往返时长确定所述待测物体100的振动频率。
30.通过上述实施方式,光斑最大坐标值和光斑最小坐标值即波峰和波谷,沿轴f(t)方向上的距离较大,便于直观的通过第一幕板410和第二幕板420上的光斑图像观测,以判断计算机700上显示的波形图是否存疑,应当理解,直接在第一幕板410和第二幕板420上观测到的光斑图像(肉眼观察)精度较低,旨在定性判断计算机700是否明显计算有误,并且此验证方式难以针对振动频率(振动太快无法看清),只能大致的观测到分别在x、y、z轴上的振幅,这些振幅合成至三维空间上的振幅后与计算机700中显示的波形图对比,若存在反相或差别过大,则说明计算机700的计算有误,也可能是图像采集装置存在故障,否则说明测量结果可靠。
31.在实施例1的一些实施方式中,所述根据所述光斑运动轨迹确定待测物体100的振动参数包括:根据式(3)确定所述振动频率,f=1
÷
t(3),在式(3)中,f为振动频率,t为所述光斑往返时长。
32.在本技术的实施例2中,提供了一种振动测量装置,包括:第一激光器310、第二激光器320,用于正交设置并发射激光束;固定板200,用于固定安装在待测物体100上,所述第一激光器310和所述第二激光器320固定在所述固定板200上;第一幕板410、第二幕板420,分别用于接收所述第一激光器310和所述第二激光器320发射的激光束,并在所述第一幕板410和所述第二幕板420上分别形成光斑;l形透明板500,用于固定所述第一幕板410和所述第二幕板420;
第一图像采集装置610、第二图像采集装置620,固定在所述l形透明板500上,分别用于采集所述第一幕板410和所述第二幕板420上的光斑图像信息;处理装置,分别与所述第一图像采集装置610以及所述第二图像采集装置620连接,用于对所述光斑图像信息进行处理生成光斑运动轨迹,并根据所述光斑运动轨迹确定待测物体100的振动参数。
33.在实施例2的一些实施方式中,所述第一幕板410上设有平面直角坐标系xoz,所述第二幕板420上设有平面直角坐标系yoz,所述第一幕板410和所述第二幕板420上均设有成矩形阵列排布的透光孔。
34.通过上述实施方式,l形透明板500采用透明的亚克力板,第一幕板410和第二幕板420采用铝箔(遮光性好,避免自然光冲淡光斑的采集),第一图像采集装置610和第二图像采集装置620采用相机,第一幕板410设置在l形透明板500的内侧面,第一图像采集装置610设置在l形透明板500的外侧面并且镜头正对第一幕板410,第二幕板420设置在l形透明板500的内侧面,第二图像采集装置620设置在l形透明板500的外侧面并且正对第二幕板420(如图2所示),相机通过长时间曝光得到多个周期内透过通孔800的光斑图像,或使用高速相机,高频拍照,计算机700对所有照片进行堆栈处理,获得多个周期内的光斑合成图像。通孔800的间距设置为等于通孔800的直径,例如设置为0.5毫米,此时的振幅测量误差为0.5毫米,采集到的图像实际上是光点,计算机700上显示的波形图是利用样条曲线将各光点对应的坐标点串连起来形成光滑的曲线。频率的测量则需要利用计算机700对图像灰度进行计算,例如相机长时间曝光时,光斑每次经过同一通孔800时,透过该通孔800在感光元件上形成的图像灰度变浅(逐渐变亮),例如,计算的初始灰度为80%,此时的时间为t1,光斑再次经过该通孔800,灰度变为60%,此时的时间为t2,从灰度为80%到灰度为60%之间的时间差t0=t2-t1即为光斑往返时长。
35.图7和图8中引线s所指的特征为光斑。
36.本技术中述及的参数中,时间(例如t,t,t1,t2,t0)的单位为秒,长度(例如a,x(t),y(t),z(t),f(t))的单位为毫米,频率(例如f)的单位为赫兹。
37.以上实施例仅是对本技术的解释,其并不是对本技术的限制,本领域技术人员在阅读完本说明书后可以根据需要对本技术的实施方式做出没有创造性贡献的修改,但只要在本技术的权利要求范围内都受到专利法的保护。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1