一种实现天文定向车上作业的方法与流程
1.本实发明涉及一种实现天文定向车上作业的方法。
背景技术:
2.天文定向是以观测天体来确定地面目标方位角的高精度自主定向方法。使用时需要将经纬仪架设在水平装置上,通过测量测站至目标点的方向角、测站至恒星的方向角,以及测量恒星时刻的时间,通过软件计算得出测站至目标点的方位角。该种使用模式作业时,架设三角架和经纬仪调水平会占用大量的时间,特别是在野外作业,基座的水平稳定性差,无法满足快速定向的实际需求。
技术实现要素:
3.为了解决上述问题,本发明提供一种实现天文定向车上作业的方法。
4.本发明是通过以下技术方案解决上述技术问题的:一种实现天文定向车上作业的方法,包括以下解算步骤:
5.(1)观瞄倾角的计算;
6.(2)观瞄参数的修正;
7.(3)车上作业恒星方位角的修正;
8.(4)车上作业天文定向直接传递的修正。
9.进一步的,需要将经纬仪架设在车上与载体直接固联进行天文定向作业。
10.进一步的,由于没有物理调平装置,需要利用车体的姿态信息对车上作业观瞄平台做数学调平,通过数学模型将经纬仪测量的恒星观瞄切点修正、恒星方位角修正、天文定向结果传递修正,使其达到水平状态下测量同样的作业效果,从而实现天文定向的车上作业。
11.针对测量作业中对快速性和机动性需求,提出了将经纬仪架设在车上与载体直接固联进行天文定向作业的使用模式。由于没有物理调平装置,需要利用车体的姿态信息对车上作业观瞄平台做数学调平,通过数学模型将经纬仪测量的恒星观瞄切点修正、恒星方位角修正、天文定向结果传递修正,使其达到水平状态下测量同样的作业效果,从而实现天文定向的车上作业。
12.与现有技术相比本发明具有以下优点:
13.(1)在车体上进行直接测量的天文定向作业使用模式,降低了对测试地点环境的要求,省去了车下架设三角架和经纬仪调水平的时间,能满足定向作业快速性、机动性、可靠性的要求。
14.(2)使用本方法进行天文定向作业时,一次天文定向作业时间小于5min,定向精度小于20
″
(pe),作业成果稳定可靠,作业精度满足传统天文定向精度指标(见表1,在车体上按太阳时角法进行了天文定向作业试验,摘录6个测回的作业数据)。
附图说明
15.以下结合附图对本发明作进一步详述。
16.图1为本发明车上天文定向作业示意图;
17.图2为本发明的车上观瞄恒星几何关系示意图;
18.图3为本发明车上观瞄太阳横滚角示意图;
19.图4为本发明车上观瞄太阳俯仰角示意图;
20.图5为本发明车上观瞄太阳方位角示意图。
21.图中,1.经纬仪;2.姿态测量装置;3.立柱。
具体实施方式
22.为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
23.本发明的一种实现天文定向车上作业的方法,需要载体安装一个姿态测量装置2,用以提供载体的姿态信息,作业时将经纬仪1直接与姿态测量装置2固联,再通过立柱3固定于车上,如图1所示。在车上观瞄太阳,并按照以下步骤解算:
24.(一)观瞄倾角的计算,如图2、3、4所示;
25.(二)观瞄参数的修正,如图5所示;
26.(三)车上作业恒星方位角的修正;
27.(四)车上作业天文定向直接传递的修正。
28.工作原理
29.1.观瞄倾角的计算
30.在车上进行天文定向作业,由于车上观瞄平台不水平,导致对恒星观瞄切边的左右切点产生位移。观瞄倾角通过计算观瞄方向垂直线与水平面的夹角可获得,为了叙述和计算的方便,现分别分析横滚、俯仰状态时的情况,如图2所示,有如下关系:
31.(一)当车辆存在横滚角λ
x
时,如图3所示,可得:
32.cc1=cd*sinλ
x
33.β
x
=arcsin(cc1/ac)==arcsin(sinλ
x
*cosαh)
ꢀꢀꢀꢀꢀꢀꢀ
(1)
34.(二)当车辆存在俯仰角λy时,如图4所示,可得:
35.cc1=ce*sinλy36.βy=arcsin(cc1/bc)=arcsin(sinλ
x
*sinαh)
ꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
37.综合车辆的横滚和俯仰姿态的影响,有β=β
x
+βy,即
38.β=arcsin(sinλ
x
*cosαh)+arcsin(sinλ
x
*cosαh)
ꢀꢀꢀꢀꢀꢀ
(3)
39.式中:
40.β
x
——为横滚角引起在观测方向上的倾斜角;
41.βy——为俯仰角引起在观测方向上的倾斜角;
42.β——为经纬仪在观测方向上的倾角;
43.αh‑‑‑‑
为经纬仪的观测方向角。
44.2.观瞄参数的修正
45.经纬仪在观瞄方向上存在β倾角时,对太阳的观测可用图5描述。
46.图5中,在水平状态下观瞄太阳,左切时切点应在a点,然而在倾斜β角时,左切点是在b点,数据处理时应把b点移到a点。可以分成两步。第一是把经纬仪的方位右移bc到达c点;第二步是把经纬仪的高低角从c点下移至a点。故经纬仪的方位角需要增加bc相应的观测角,高低角需要减小ca相应的观测角。从图5中可知:
[0047][0048][0049]
由于δα和δθ均为小量,则式(4)、(5)可化简为
[0050][0051][0052]
所以,在进行太阳天文定向计算时,参与以下计算的经纬仪的方位和高低角均应首先进行如下运算。
[0053][0054][0055]
式中:
[0056]
r——太阳半径,r=696000km;
[0057]dh
——地球离太阳距离,取其平均值149598000km;
[0058]
αh、α'h——经纬仪1修正前后的方向角读数;
[0059]
θh、θ'h——经纬仪1修正前后的高低角读数。
[0060]
3.车上作业恒星方位角的修正
[0061]
进行车上天文作业时,模型上除了需要进行太阳观瞄倾角的修正计算外,还需要进行普通恒星的方位角修正。
[0062]
设经纬仪1测量得到的恒星方位角及高低角读数分别为αh、θh(观测太阳时应为上述修正后的值)。恒星离测站的距离为dh。经纬仪安装基座相对于车体姿态测量装置2的方位标定误差角为k。观测时车体姿态测量装置的输出值横滚角和俯仰角分别为λ
x
、λy。通过坐标旋转可以得到天文定向中应该输入的水平状态下恒星的方向角α
hg
。
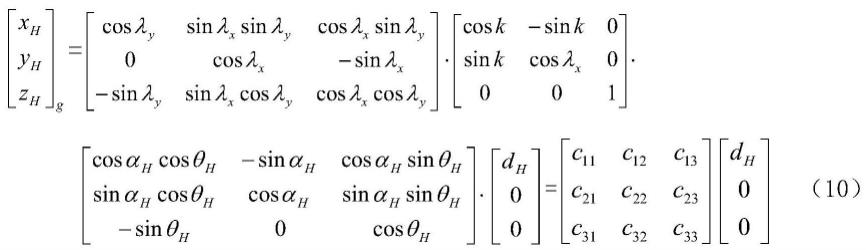
[0063]
其位置矩阵为:
[0064][0065]
通过对(10)式的计算,得到在水平状态下恒星的方向角α
hg
为:
[0066]
α
hg
=tan-1
(y
hg
/x
hg
)=tan-1
(c
21
/c
11
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)。
[0067]
4.车上作业天文定向直接传递的修正
[0068]
在观瞄目标点时,经纬仪观瞄的方位角及高低角读数分别为:αm、θm,目标点至测站的距离为dm。同上原理,则通过坐标旋转得到天文定向中应该输入的水平状态下目标的方向角α
mg
。
[0069]
其位置矩阵为:
[0070][0071]
通过对(12)式的计算,在水平状态下目标的方位角α
mg
为:
[0072]
α
mg
=tan-1
(y
mg
/x
mg
)=tan-1
(c
21
/c
11
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)
[0073]
以上姿态角均为观瞄时获取经纬仪数据的瞬时姿态测量装置的读数。
[0074]
当具有物理调平装置对观瞄平台水平调平后,进行天文观测时只需要读取经纬仪的方向角数据,而在数学调水平时则还需要读取经纬仪的高低角数据,不过利用电子经纬仪作业时,这一切都可以由计算机自动完成数据采集。
[0075]
表1天文定向车上作业数据
[0076][0077]
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1