缺陷检测方法、装置及设备与流程
本技术涉及图像识别,尤其涉及一种缺陷检测方法、装置及设备。
背景技术:
1、对产品进行缺陷检测对提高生产效率和保证生产质量均具有重要意义。目前,对生产线上的待检测物品(例如,透射式液晶盒)进行缺陷检测,主要是通过对摄像装置获取的待检测物品的图像进行分析,以确定待检测物品是否存在确定。
2、传统技术提供的缺陷检测方法仅适用于表面检测。具体来说,传统技术对待检测物品的图像进行缺陷检测所获得的检测结果,仅能反应出待检测物品或待检测物品的表面是否存在缺陷。也就是说,若待检测物品的内部存在缺陷,则传统技术无法检测出待检测物品内部存在的该缺陷。
3、因此,亟需一种缺陷检测方法,该方法可以实现对待检测物品内部存在的缺陷的检测。
技术实现思路
1、本技术提供了一种缺陷检测方法、装置及设备,通过该方法可以实现对待检测物品内部存在的缺陷的检测。
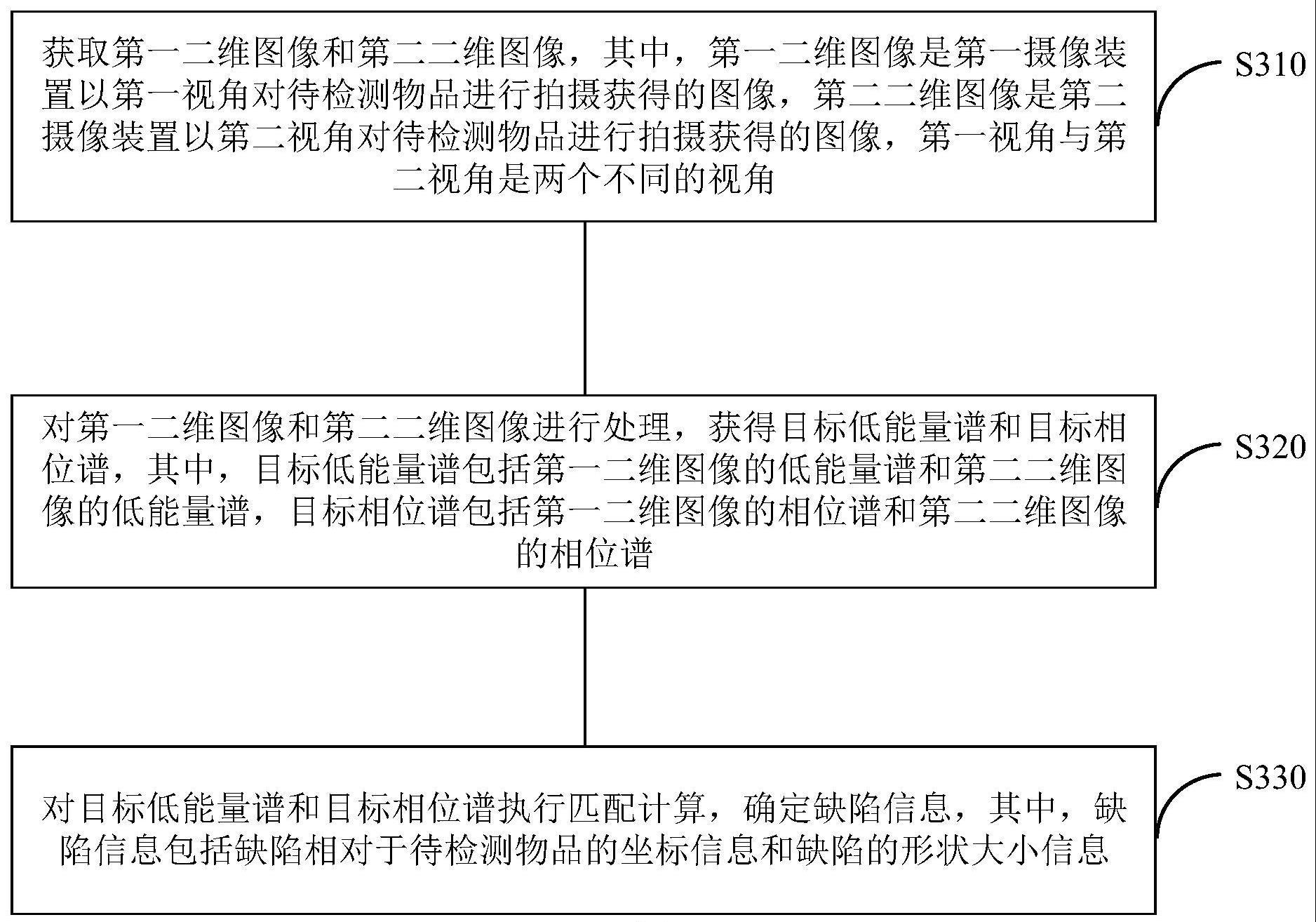
2、第一方面,本技术实施例提供了一种缺陷检测方法,所述方法包括:获取第一二维图像和第二二维图像,其中,所述第一二维图像是第一摄像装置以第一视角对待检测物品进行拍摄获得的图像,所述第二二维图像是第二摄像装置以第二视角对所述待检测物品进行拍摄获得的图像,所述第一视角与所述第二视角是两个不同的视角;对所述第一二维图像和所述第二二维图像进行处理,获得目标低能量谱和目标相位谱,其中,所述目标低能量谱包括所述第一二维图像的低能量谱和所述第二二维图像的低能量谱,所述目标相位谱包括所述第一二维图像的相位谱和所述第二二维图像的相位谱;对所述目标低能量谱和所述目标相位谱执行匹配计算,确定缺陷信息,其中,所述缺陷信息包括所述缺陷相对于所述待检测物品的三维坐标信息和所述缺陷的形状大小信息。
3、在一种可能的设计中,所述对所述第一二维图像和所述第二二维图像进行处理,获得目标低能量谱和目标相位谱,包括:根据所述第一二维图像和所述第二二维图像,获得目标频谱,其中,所述目标频谱包括所述第一二维图像的频谱和所述第二二维图像的频谱;对所述目标频谱执行傅里叶逆变换,获得傅里叶谱、目标能量谱和所述目标相位谱;基于谱残差的显著性检测算法,对所述傅里叶谱、所述目标能量谱和所述目标相位谱进行显著性检测,获得目标灰度谱图像;根据所述待检测物品对应的掩码图和所述目标灰度谱图像,获得所述目标低能量谱。
4、可选的,在另一种可能的设计中,所述根据所述第一二维图像和所述第二二维图像,获得目标频谱,包括:根据所述第一二维图像和所述第二二维图像,确定目标二维图像,其中,所述目标二维图像包括所述第一二维图像的信息和所述第二二维图像的信息;对所述目标二维图像执行傅里叶变换处理,获得所述目标频谱。
5、可选的,在另一种可能的设计中,所述根据所述第一二维图像和所述第二二维图像,确定目标二维图像,包括:根据所述第一摄像装置的内参数和外参数对所述第一二维图像进行校正,获得校正后的第一二维图像;以及根据所述第二摄像装置的内参数和外参数对所述第二二维图像进行校正,获得校正后的第二二维图像;根据第一转换矩阵,将所述校正后的所述第一二维图像转换为世界坐标系中的预设平面中的图像;其中,所述第一转换矩阵表示物品在所述世界坐标系和所述第一摄像装置对所述物品拍摄所获得的二维图像的像素坐标系之间的位置映射关系;根据第二转换矩阵,将所述校正后的第二二维图像转换为所述预设平面中的图像,其中,所述第二转换矩阵表示物品在所述世界坐标系和所述第二摄像装置对所述物品拍摄所获得的二维图像的像素坐标系之间的位置映射关系;在所述世界坐标系中,根据匹配算法,对所述预设平面中的所述校正后的第一二维图像和所述预设平面中的所述校正后的第二二维图像中的各像素点进行匹配,以获得所述目标二维图像。
6、可选的,在另一种可能的设计中,在所述根据所述第一摄像装置的内参数和外参数对所述第一二维图像进行校正,获得校正后的第一二维图像;以及根据所述第二摄像装置的内参数和外参数对所述第二二维图像进行校正,获得校正后的第二二维图像之前,所述方法还包括:分别对所述第一摄像装置和所述第二摄像装置进行标定,获得第一标定参数和第二标定参数,其中,所述第一标定参数包括所述第一转换矩阵、所述第一摄像装置的内参数和外参数,所述第二标定参数包括所述第二转换矩阵、所述第二摄像装置的内参数和外参数。
7、可选的,在另一种可能的设计中,所述对所述目标低能量谱和所述目标相位谱执行匹配计算,确定缺陷信息,包括:根据匹配算法,对所述目标低能量谱和所述目标相位谱执行匹配计算确定多个对应关系,其中,每个对应关系为所述目标低能量谱中的一个目标点和所述目标相位谱中的一个目标点之间的对应关系;根据所述多个对应关系所关联的所述目标低能量谱中的多个目标点的低能量,确定所述缺陷的形状大小信息;根据所述多个对应关系所关联的所述目标相位谱中的多个目标点的相位,确定所述缺陷相对于所述待检测物品的三维坐标信息。
8、可选的,在另一种可能的设计中,所述根据所述多个对应关系所关联的所述目标低能量谱中的多个目标点的低能量,确定所述缺陷的形状大小信息,包括:对所述多个对应关系所关联的所述目标低能量谱中的多个目标点的低能量中的每个目标点关联的低能量计算差值,获得所述多个目标点中的每个目标点的低能量差值结果;以及,根据所述多个目标点的低能量差值结果,确定所述缺陷的形状大小信息;所述根据所述多个对应关系所关联的所述目标相位谱中的多个目标点的相位,确定所述缺陷相对于所述待检测物品的三维坐标信息,包括:对所述多个对应关系所关联的所述目标相位谱中的多个目标点的相位中的每个目标点关联的相位计算差值,获得所述多个目标点中的每个目标点的相位差值结果;以及,根据所述多个目标点的相位差值结果,确定所述缺陷相对于所述待检测物品的三维坐标信息。
9、可选的,在另一种可能的设计中,所述获取第一二维图像和第二二维图像,包括:在所述待检测物品存在缺陷的情况下,获取所述第一二维图像和所述第二二维图像。
10、可选的,在另一种可能的设计中,所述第一二维图像具体是所述第一摄像装置以所述第一视角对处于目标位置的所述待检测物品进行拍摄获得的图像,所述第二二维图像具体是所述第二摄像装置以所述第二视角对处于所述目标位置的所述待检测物品进行拍摄获得的图像。
11、可选的,在另一种可能的设计中,所述第一视角或所述第二视角为垂直于所述待检测物品中的缺陷的视角。
12、第二方面,本技术还提供了一种缺陷检测装置,所述控制装置包括:获取模块用于:获取第一二维图像和第二二维图像,其中,所述第一二维图像是第一摄像装置以第一视角对待检测物品进行拍摄获得的图像,所述第二二维图像是第二摄像装置以第二视角对所述待检测物品进行拍摄获得的图像,所述第一视角与所述第二视角是两个不同的视角;处理模块用于:对所述第一二维图像和所述第二二维图像进行处理,获得目标低能量谱和目标相位谱,其中,所述目标低能量谱包括所述第一二维图像的低能量谱和所述第二二维图像的低能量谱,所述目标相位谱包括所述第一二维图像的相位谱和所述第二二维图像的相位谱;所述处理模块还用于:对所述目标低能量谱和所述目标相位谱执行匹配计算,确定缺陷信息,其中,所述缺陷信息包括所述缺陷相对于所述待检测物品的三维坐标信息和所述缺陷的形状大小信息。
13、第三方面,本技术还提供了缺陷检测设备,包括至少一个处理器,所述至少一个处理器用于与存储器耦合,读取并执行所述存储器中的指令,以实现前述第一方面中任一种可能设计中所提供的方法。
14、可选地,所示缺陷检测设备还包括该存储器。
15、第四方面,本技术还提供了一种系统,包括前述第三方面所提供的缺陷检测设备。
16、第五方面,本技术还提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,当所述计算机程序在计算机上运行时,使得所述计算机执行前述第一方面中任一种可能设计中所提供的方法。
17、第六方面,本技术还提供了一种芯片系统,包括处理器,用于从存储器中调用并运行计算机程序,使得安装有所述芯片系统的设备执行前述第一方面中任一种可能设计中所提供的方法。
18、第七方面,本技术实施例还提供一种包含指令的计算机程序产品,当该计算机程序产品在计算机上运行时,使得该计算机执行前述第一方面中任一种可能设计中所提供的方法。
19、本技术实施例提供的缺陷检测方法,包括:获取第一二维图像和第二二维图像,其中,第一二维图像是第一摄像装置以第一视角对待检测物品进行拍摄获得的图像,第二二维图像是第二摄像装置以第二视角对待检测物品进行拍摄获得的图像,第一视角与第二视角是两个不同的视角;对第一二维图像和第二二维图像进行处理,获得目标低能量谱和目标相位谱,其中,目标低能量谱包括第一二维图像的低能量谱和第二二维图像的低能量谱,目标相位谱包括第一二维图像的相位谱和第二二维图像的相位谱;对目标低能量谱和目标相位谱执行匹配计算,确定缺陷信息,其中,缺陷信息包括缺陷相对于待检测物品的三维坐标信息和缺陷的形状大小信息。上述缺陷检测过程中,首先获取以不同视角对待检测物品进行拍摄所获得的不同的二维图像(即第一二维图像和第二二维图像)。然后对不同的二维图像进行处理获得目标低能量谱和目标相位谱。进一步,根据目标低能量谱和目标相位谱执行匹配计算可以获得缺陷信息,缺陷信息包括缺陷相对于待检测物品的三维坐标信息和缺陷的形状大小信息。综上,本技术实施例提供的缺陷检测方法可以实现对待检测物品内部存在的缺陷的检测。
- 还没有人留言评论。精彩留言会获得点赞!