一种空间光调制的抗强光干扰的偏振成像装置及成像方法
本发明属于光学探测领域。
背景技术:
1、随着科技的进步与发展,强光背景下的暗弱空间目标已成为未来科研的重要方向,这类目标受雷达散射、红外辐射能力弱,而且受大气传输路径、云场景杂波、地表辐射等复杂环境背景的干扰,其辐射亮度很可能与背景相接近甚至更弱,使得目标可探测距离、预警时间、检测概率被大大降低。光学探测具有高精度、高时效、远距离的广域监视与探测能力,已成为强光背景下暗弱目标及早发现、快速检测、跟踪识别的重要发展方向。
2、偏振成像技术利用光的偏振特性,可获得目标的偏振态、 空间轮廓等特征,从而提高目标在图像中的对比度。同时,偏振成像探测系统稳定性高、抗干扰能力强、探测距离远,在暗弱目标探测领域具有突出优势。
3、研究空间暗弱目标偏振探测技术,对进一步促进我国发展空间航天器自主交会对接、空间目标对抗等航天技术具有重要应用价值。通过获取强背景下的空间目标偏振参数,得到强背景下暗弱目标的偏振特性,达到提高偏振探测系统的稳定性、抗干扰能力、探测精准度等目的。
4、目前,强光背景下暗弱目标探测仍存在一些问题:大多数成像装置受目标波长的限制,难以区分目标反射的光强和干扰光强,不能抵抗强光的干扰;缺少自适应光圈调节技术,难以自动获取对比度最大,清晰度最高的图像。因此,需要一种新的技术来解决现存的问题。
技术实现思路
1、本发明解决现有大多数成像装置受目标波长的限制,难以区分目标反射的光强和干扰光强,不能抵抗强光的干扰;缺少自适应光圈调节技术,难以自动获取对比度最大,清晰度最高的图像的问题。
2、本发明提供以下技术方案:一种空间光调制的抗强光干扰的偏振成像装置,包括:所述抗强光干扰的偏振成像装置包括空间光调制系统、图像清晰度评价系统和自适应光圈自动调节系统;
3、所述空间光调制系统用于采集光信号,并将光信号进行调制之后产生电信号,并将所述电信号发送给图像清晰度评价系统,用于实现抑制干扰光强;
4、图像清晰度评价系统用于根据接收的电信号进行处理,获得所采集图像的清晰度,并将接收到的电信号发送给自适应光圈自动调节系统;
5、自适应光圈自动调节系统用于将接收电信号,并根据所述电信号调整光圈值和图像清晰度并输出至空间光调制系统。
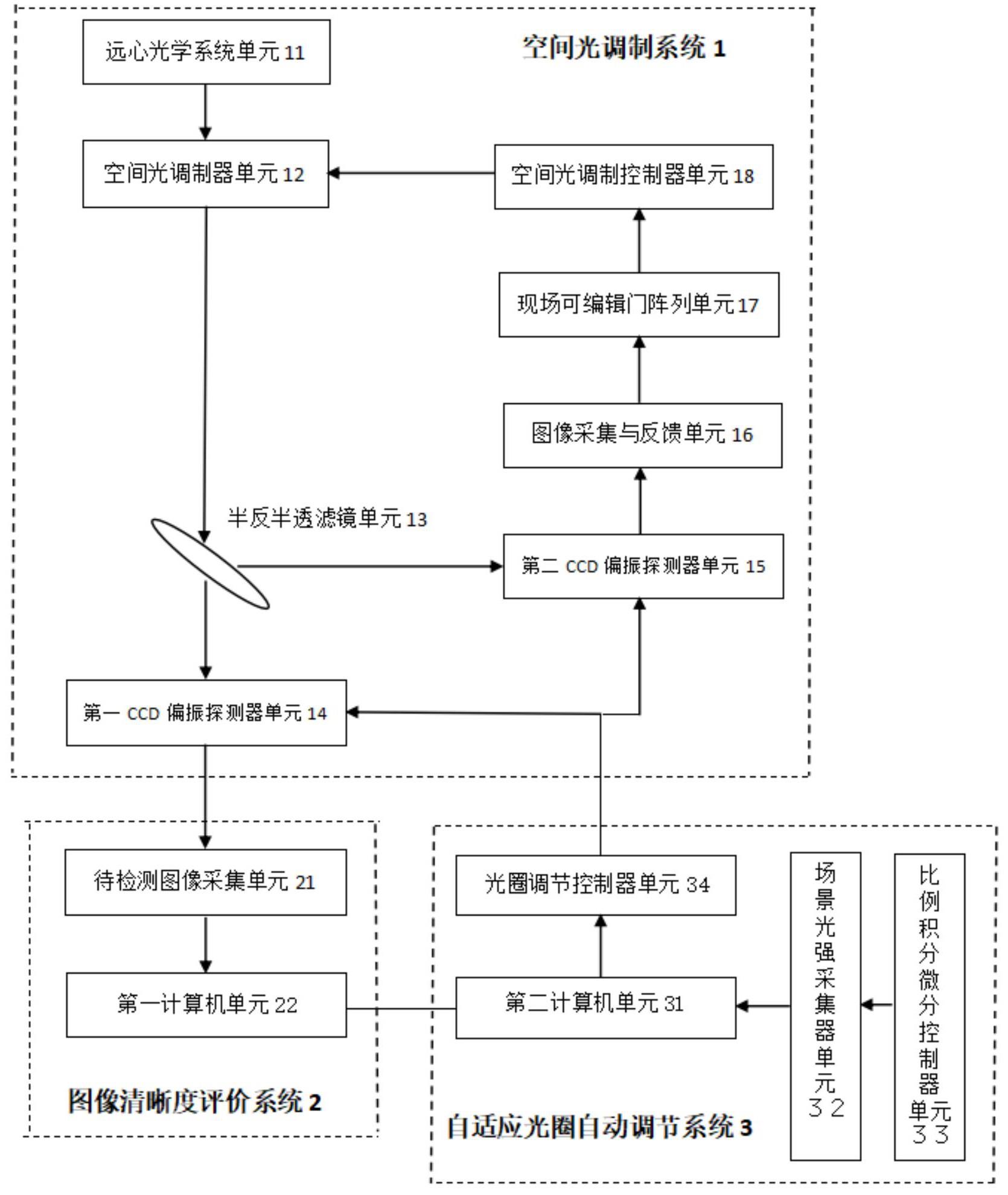
6、进一步的,提供一种优选实施方式,所述空间光调制系统包括远心光学系统单元、空间光调制器单元、半反半透滤镜单元、第一ccd偏振探测器单元、第二ccd偏振探测器单元、图像采集与反馈单元、现场可编辑门阵列单元、空间光调制控制器单元;
7、所述远心光学系统单元将所述光信号发送给空间光调制器单元,所述空间光调制器单元将接收到的光信号传输给半反半透滤镜单元;所述半反半透滤镜单元将接收到的光信号分别传输给第一ccd偏振探测器单元和第二ccd偏振探测器单元,所述光信号在所述第一ccd偏振探测器单元和第二ccd偏振探测器单元相互传输;
8、所述第二ccd偏振探测器单元将所述光信号转化为电信号传输给图像采集与反馈单元;所述图像采集与反馈单元将接收到的电信号传输给现场可编辑门阵列单元和空间光调制控制器单元;所述空间光调制控制器单元将接收到的电信号转化为光信号传输给空间光调制器单元,用于实现对干扰光光强的估计优化。
9、进一步的,提供一种优选实施方式,所述图像清晰度评价系统包括待检测图像采集单元、第一计算机单元;所述待检测图像采集单元接收第一ccd偏振探测器单元的光信号转化为电信号传输给第一计算机单元,所述第一计算机单元将接收到的电信号传输给自适应光圈自动调节系统,用于计算和评价所采集图像的清晰度。
10、进一步的,提供一种优选实施方式,所述自适应光圈自动调节系统包括第二计算机单元、场景光强采集器单元、比例积分微分控制器单元、光圈调节控制器单元;
11、所述第二计算机单元接收所述第一计算机单元的电信号传输给光圈调节控制器单元;所述比例积分微分控制器单元将电信号转化为光信号传输给场景光强采集器单元,并将所述光信号反馈给第二计算机单元,用于建立光圈值和图像清晰度之间的函数映射关系,通过图像图像清晰度来自动调整光圈参数。
12、进一步的,提供一种优选实施方式,所述第一计算机单元内部嵌有信号转化模块,所述信号转化模块将第一ccd偏振探测器单元接收到的光信号转化为电信号。
13、进一步的,提供一种优选实施方式,所述第二计算机单元内部嵌有信号集成模块,所述信号集成模块接收比例积分微分控制器单元的电信号和场景光强采集器单元中将电信号转化成的光信号。
14、方案二、一种空间光调制的抗强光干扰的偏振成像方法,所述方法采用方案一中任意一项所述装置实现,所述方法包括以下步骤:
15、步骤1:通过远心光学系统单元,使所述远心光学系统单元的主光线都垂直入射到处于成像物镜焦平面处的空间光调制器单元上,所述空间光调制器单元接收来自远心光学系统单元的主光线,并使干扰光的透过率降低至零,使信号光的透过率保持不变;经空间光调制器单元调制后的光线传递给半反半透滤镜单元;
16、步骤2:半反半透滤镜单元将处理的光信号进行折射与反射,反射光传递给第二ccd偏振探测器单元使用并接收来自半反半透滤镜单元的反射光,折射光传递给第一ccd偏振探测器单元;并将接收到的图像信号传递给图像采集与反馈单元;
17、步骤3:经图像采集与反馈单元处理图像信号后,判断干扰光强和信号光强,并将信息传递给现场可编辑门阵列单元;
18、步骤4:可编辑门阵列单元根据处理来自图像采集与反馈单元的判断,实时向空间光调制控制器单元下达调整指令;改变空间光调制控制器单元上各个像素的透过率;
19、步骤5:第一ccd偏振探测器单元接收来自半反半透滤镜单元的折射光,并将接收到的图像信号传递给图像清晰度评价系统,整个空间光调制系统实现闭环的负反馈调节;
20、步骤6:待检测图像采集与反馈单元接收来自第一ccd偏振探测器单元的图像信号,传递给第一计算机单元;
21、步骤7:第一计算机单元将待检测图像进行高低阈值处理,图像分割,平坦区域清晰度计算,边缘区域清晰度计算,加权求和,得到当前图像的清晰度y,并将信息传递给自适应光圈自动调节系统的第二计算机单元;
22、步骤8:场景光强采集器单元实时采集当前场景光强度,并传递给第二计算机单元;
23、步骤9:通过比例积分微分控制器单元多次训练建立了图像清晰度和光圈调节步长的关系,并将信号传递给第二计算机单元;
24、步骤10:第二计算机单元结合图像清晰度评价系统所检测的图像清晰度,场景光强采集器单元所采集的场景光强和比例积分微分控制器单元训练建立的图像清晰度和光圈调节步长的关系,得出光圈值和图像质量之间精确的函数映射关系,并将该映射关系指令传递给光圈调节控制器单元;
25、步骤11:光圈调节控制器单元接收来自第二计算机单元的映射关系指令,整个系统形成闭环控制,对第一ccd偏振探测器单元和第二ccd偏振探测器单元的光圈参数实现自适应自动调节,直至得到最接近理想清晰度的图像。
26、进一步的,提供一种优选实施方式,所述判断干扰光强和信号光强的方法为:
27、当第二ccd偏振探测器单元拍摄偏振方向分别为0°,45°,90°,135°的四幅图像时﹐强度分别记为i0(u,v,s,t)、i45(u,v,s,t)、i90(u,v,s,t)和ⅰ135(u,v,s,t),则场景的线性stokes矢量可以分别表示为:
28、(1)
29、式中:i(u,v,s,t)为场景的总光强;q(u,v,s,t)为水平方向和垂直方向的强度差;u(u,v,s,t)为45°和135°方向的强度差,通过上式得到偏振度p(u,v,s,t)和偏振角θ(u,v,s,t)的表达式为:
30、(2)
31、(3)
32、获取中心视角的偏振角图像,选取其中出现频率最高的偏振角作为干扰光偏振角θb;干扰光偏振度pb为各视角偏振度图重聚焦融合后得到的中心视角偏振度p(u,v,s,t)的最大值;
33、(4)
34、(5)
35、当定义拍摄方向0°和90°分别为x轴和y轴时,干扰光偏振部分光强bp(u,v,s,t)在x轴和y轴的分量表达式为:
36、(6)
37、由于在x轴和y轴方向上采集的图像强度分别为ⅰ0(u,v,s,t)和ⅰ90(u,v,s,t)时,干扰光偏振部分光强bp(u,v,s,t)在x轴和y轴的分量表达式又表示为:
38、(7)
39、得到干扰光的偏振部分光强为:
40、(8)
41、通过上式可知﹐中心视角的干扰光光强值为:
42、(9)
43、目标的原始反射光光强l(u,v,s,t)经过散射效应变成非偏振光,a∞(u,v,s,t)为无穷远处干扰光强,是具有偏振度为pb的部分通道偏振光,则:
44、(10)
45、则当探测距离z→∞时,e(-z)→0,得到无穷远处干扰光强为:
46、(11)
47、根据物理退化模型得到在探测器获取的图像表示为:
48、(12)
49、选取式ⅰ0(u,v,s,t)中得到的无穷远处的a∞(u,v,s,t)和原图像强度i(u,v,s,t)中最接近的1%的像素值作为无穷远处反射光强度值a'∞;
50、则场景目标的信号光光强为:
51、(13)。
52、进一步的,提供一种优选实施方式,所述步骤7的图像清晰度评价方法为:
53、第二计算机单元通过分析待测图像,引入高低阈值处理,该过程的表达式为:(14)
54、其中,gh为整幅图像的最大梯度值,gl为整幅图像的平均值,th为梯度高阈值,tl为梯度低阈值;g表示原始图像梯度,g’表示高低阈值处理后的图像梯度;
55、将边缘作为前景,将平坦区作为背景,实现边缘和平坦区的分割;该过程表达式为:
56、(15)
57、其中,threshold是由ostu法计算得到的最佳阈值,上述过程虽然实现了边缘区与平坦区的分割,但该过程并不能去除由孤立噪声点产生的伪边缘;e表示边缘,ne表示平坦区;
58、为去除孤立噪声点产生的伪边缘,剔除伪边缘后的梯度图像记作edge;该过程表达式为
59、(16)
60、其中,sum(i,j)表示像素点(i,j)的八邻域中被判断为边缘点的个数,至此完成图像分割过程,得到最终的平坦区nedge和边缘区edge;
61、平坦区清晰度计算:
62、利用点锐度算法对图像平坦区nedge计算清晰度,基于点锐度函数的图像清晰度的定义如下:
63、(17)
64、其中,df为灰度变化幅值,dx是像素间的距离增量,m×n为图像大小;(i,j)为图像像素点;
65、边缘区清晰度计算:
66、利用归一化的平方梯度算法对图像平坦区计算清晰度;平方梯度函数定义式如下:
67、(18)
68、由于上式不能实现不同尺寸图像清晰度的横向对比,所以将该式归一化,具体为:
69、(19)
70、其中,图像大小m×n,i(i,j)表示图像像素点(i,j)处的像素灰度值;图像清晰度计算:
71、对平坦区清晰度和边缘区清晰度加权求和得到整幅图像的清晰度,其计算公式如下:
72、(20)
73、其中,和分别对应平坦区清晰度和边缘区清晰度的权重。
74、进一步的,提供一种优选实施方式,所述步骤10的得出光圈值和图像质量之间精确的函数映射关系方法为:
75、用场景光强采集器单元,获取当前的场景光强,设最佳光圈位置为对应的最佳清晰度为,其中是通过实验确定的光圈评价值;在一定场景光强条件下,图像清晰度与光圈位置大小的平方成正比,y表示图像当前清晰度值,d表示当前光圈位置,则有:
76、(21)
77、其中,k为场景光强比例参数,第二计算机单元根据图像清晰度信息和当前光圈位置设置k,并根据图像信息实时优化k值,
78、令清晰度偏差值,光圈位移,则有:
79、(22)
80、同时,光圈位移与其所转角度α近似相似线性关系有:
81、(23)
82、由此,我们可以得到光圈所转角度α与的关系式为:
83、(24)
84、基于以上函数关系,通过比例积分微分控制器单元(33)进行简化后得到的公式为:
85、(25)。
86、本发明的有益之处在于:
87、本发明通过控制空间光调制器,进行有选择的像素级光强调制,改变空间光调制器上各个像素的透过率。使干扰光的在空间光调制器上透过率降低至零,使信号光的透过率保持不变。进而实现对干扰光的抑制,实现无干扰光的图像输出。
88、本发明使用自适应光圈调节技术手段,通过比例积分微分控制器多次训练建立光圈值和图像质量之间精确的函数映射关系,通常使用迭代的方法不断调整光圈参数使得图像亮度逼近目标值,最大程度提高图像清晰度。
- 还没有人留言评论。精彩留言会获得点赞!