绕包机器人及用于其的胶带异常检测方法、存储介质与流程
本技术涉及自动化控制领域,尤其是涉及绕包机器人及用于其的胶带异常检测方法、存储介质。
背景技术:
1、线缆是一种电能或信号传输装置,在线缆铺设过程中常需要将两根线缆接在一起,现有技术通常将两根线缆连接端的绝缘层剥落,并采用中间接头将两根线缆的端部连接导通,随后在线缆中间接头处缠绕绝缘胶带,保证线缆接头处的绝缘等级,使得线缆能够安全可靠地运行。
2、相关技术公开了一种绕包机器人,其包括用于支撑线缆的连接盘、设置于两个连接盘之间的滑动环和用于将绝缘胶带缠绕在线缆上的绕带机构,绕带机构设置于滑动环上;两个连接盘之间通过丝杆连接,滑动环能够沿丝杆的长度方向往复滑移。绕带时,首先手动将绝缘胶带的一端固定至线缆上,对绝缘胶带进行拉伸;绕带机构以滑动环的轴线为中心周向转动,使得胶带能够紧紧地环绕在线缆上,将线缆缠绕成标准直径的线缆成品;与此同时,滑动环牵引绕带机构沿丝杆的长度方向移动,使得绕带机构能够将胶带缠绕在线缆长度方向的各个位置。
3、由于胶带在绕带过程中会受到较大的拉力,会存在绝缘胶带在绕包过程中发生断裂的可能性,影响绝缘胶带的绝缘效果;市面上为了保证芯线的绕包质量,需要安排专人来监控芯线的绕包情况,通过人工来观察绝缘胶带断裂或用完的情况;然而,由于绕带机构的转动速度较快,工作人员通过肉眼监控的效果不甚理想,存在返工率高以及浪费人力等弊端。
技术实现思路
1、为了便于工作人员对绝缘胶带异常状态的监测,提高生产效率,本技术提供了绕包机器人及用于其的胶带异常检测方法、存储介质。
2、第一方面,本技术提供的用于绕包机器人的胶带异常检测方法,采用如下的技术方案:
3、绕包机器人包括绕带机构和检测机构,所述绕带机构用于收放绝缘胶带,并将绝缘胶带缠绕于线缆外壁;所述检测机构用于检测所述绕带机构运行时的电流值;
4、所述用于绕包机器人的胶带异常检测方法包括:
5、获取绝缘胶带的状态分辨信息,所述状态分辨信息包含表征绝缘胶带状态存在异常时所述绕带机构的电流信息;所述绝缘胶带状态存在异常时,所述绕带机构空载运行;
6、控制装载有绝缘胶带的绕带机构执行绕带动作,并控制所述检测机构对所述装载有绝缘胶带的绕带机构运行时的电流进行检测,以得到所述装载有绝缘胶带的绕带机构的实时电流信息;
7、根据所述状态分辨信息与所述实时电流信息确定所述绕带机构的胶带状态的检测结果;所述胶带状态包括正常装载状态和异常状态;
8、所述胶带状态为异常状态时,向所述绕带机构发送停止运行指令,以控制所述绕带机构停止运转。
9、通过采用上述技术方案,绕包机器人在工作时,绕带机构将处于绷直状态的绝缘胶带缠绕于线缆上,检测机构对绕带机构工作时的电流进行实时采集并发送给处理器;当线缆与绕带机构之间的绝缘胶带处于绷直状态时,绕带机构负载运行,绝缘胶带处于正常装载状态;当因绝缘胶带中途断裂或用尽等原因导致绝缘胶带脱离绕带机构时,绕带机构空载运行,绝缘胶带处于异常状态;绕包机器人根据状态分辨信息确定绝缘胶带状态存在异常时绕带机构的电流信息,处理器接收到实时电流信息后与绝缘胶带状态存在异常时绕带机构的电流信息进行比对,根据比对结果判断绝缘胶带是否处于正常装载状态,从而实现对胶带异常状态的检测;当胶带状态为异常状态时,绕带机构停止运转,以便于工作人员对绝缘胶带的更换和处理,能够降低人工负担,提高线缆绕带的效率。
10、可选的,所述表征绝缘胶带状态存在异常时所述绕带机构的电流信息为绕带机构在未装载绝缘胶带的情况运行时的电流强度值;所述实时电流信息包括装载有绝缘胶带的绕带机构当前运行状态的实时电流强度值;
11、所述根据所述状态分辨信息与所述实时电流信息确定所述绕带机构的胶带状态的检测结果包括:
12、在所述实时电流强度值与所述电流强度值的差值关系满足预设条件的情况下,则判定绕带机构上的绝缘胶带处于正常装载状态;
13、若否,则判定绕带机构上的绝缘胶带处于异常状态,得到所述装载有绝缘胶带的绕带机构胶带状态的检测结果。
14、通过采用上述技术方案,公开了判断胶带状态的具体方法;由于绕带机构分别处于空载状态和正常装载状态时,绕带机构的驱动源工作的电流值会存在一定的差异,且在负载不同时,绕带机构的驱动源工作时的实时电流也会存在差异;负载不同时,绕带机构的驱动源运行电流的变化量是有一定规律的;因此,根据实时电流信息与状态分辨信息进行比对,即可判断测量机构检测搭配的实时电流信息是否处在绝缘胶带在正常装载状态的运行电流范围内,实现对绝缘胶带状态的检测和对异常状态的判断。
15、可选的,在所述向所述绕带机构发送停止运行指令,以控制所述绕带机构停止运转后,还包括:
16、基于所述检测结果生成预警信息,并将所述预警信息发送至工作人员所对应的客户端。
17、通过采用上述技术方案,预警信息能够对工作人员做出提示,当工作人员接收到预警信息后立即对绕包机器人上绝缘胶带的情况进行查看和处理,提高绕包机器人的绕包效率。
18、可选的,所述获取绝缘胶带的状态分辨信息包括:
19、接收空载运行指令;
20、响应所述空载运行指令,控制未装载绝缘胶带的绕带机构沿线缆的长度方向移动,并控制所述检测机构在所述绕带机构运行时采集多个空载初始电流值;
21、根据多个所述绕带机构的空载初始电流值,按照预设处理机制确定状态分辨信息。
22、通过采用上述技术方案,公开了一种获取绝缘胶带的状态分辨信息的方式;绕带机构的驱动源因使用环境或时间不同,运行电流值可能会存在差异;在执行绕包动作之前,对待工作的绕带机构空载运行时的电流值重新进行测量,得到当前环境下与绕带机构相对应的状态分辨信息,提高对绝缘胶带的状态判断时的准确性。
23、可选的,在所述根据所述状态分辨信息与所述实时电流信息确定所述绕带机构的胶带状态的检测结果之后,在所述向所述绕带机构发送停止运行指令之前,还包括:验证所述胶带状态检测结果,且验证通过。
24、通过采用上述技术方案,在因绝缘胶带的状态出现异常关停绕带机构之前,对检测结果进行验证,判断线缆实际的绕带情况,以提高检测结果的准确性,从而能够减小不必要的停工,提高绕包机器人的绕包效率。
25、可选的,所述验证所述胶带状态检测结果包括,
26、接收线缆绕包后的成品标准参数信息;所述成品标准参数信息包括成品线缆的外径数值信息;
27、获取完成绕包后的线缆当前位置的外径数值信息;
28、将所述完成绕包后的线缆当前位置的外径数值信息与所述成品线缆的外径数值信息进行比较;
29、根据所述完成绕包后的线缆当前位置的外径数值信息与所述成品线缆的外径数值信息的比较结果确定所述胶带状态是否为异常状态;
30、若是,则验证通过。
31、通过采用上述技术方案,公开了具体的验证方式;通过将线缆当前位置的外径数值与成品线缆的外径数值进行比对判断绝缘胶带是否缠绕到线缆上,实现对检测结果进行验证。
32、可选的,所述异常状态包括绝缘胶带出现断裂的状态与绝缘胶带用尽的状态;
33、所述根据所述完成绕包后的线缆当前位置的外径数值信息与所述成品线缆的外径数值信息的比较结果确定所述胶带状态是否为异常状态包括:
34、当所述胶带状态为异常状态时,若所述完成绕包后的线缆当前位置的外径数值信息与所述成品线缆的外径数值信息的差值高于预设差值,则输出表征验证通过的验证成功信号。
35、通过采用上述技术方案,若线缆当前位置的外径数值与成品线缆的外径数值超出预设差值,则说明绝缘胶带未成功缠绕在线缆上,从而确定绝缘胶带当前处于异常状态。对检测结果的验证通过,控制绕带机构停止工作。
36、第二方面,本技术提供一种绕包机器人,采用如下的技术方案:
37、一种绕包机器人,包括
38、处理器处理器,用于执行计算机程序,以实现上述用于绕包机器人的胶带异常检测方法;
39、与所述处理器通信连接的存储器,所述存储器中储存有可在所述处理器上运行的计算机程序;
40、与所述处理器通信连接的绕带机构和检测机构;
41、绕带机构,用于带动绝缘胶带以线缆的轴线为中心周向转动,将绝缘胶带缠绕于线缆外壁;
42、检测机构,用于检测所述绕带机构运行时的电流值。
43、通过采用上述技术方案,提供了能执行实现上述用于绕包机器人的胶带异常检测方法的绕包机器人。
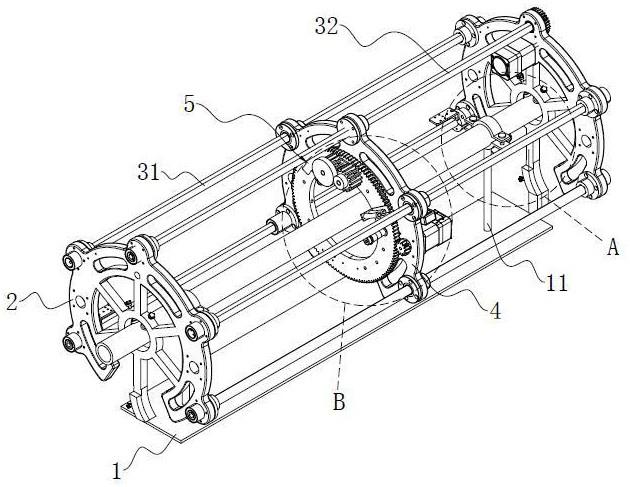
44、可选的,还包括两个连接盘,两个所述连接盘呈平行设置,两个所述连接盘的轴线呈共线设置,待绕包线缆长度方向的两端分别设置于两个所述连接盘的轴心处;还包括丝杆和滑动环,所述丝杆长度方向的两端穿设并转动连接于两个所述连接盘,所述丝杆穿设于所述滑动环,所述滑动环能够沿所述丝杆的长度方向往复滑移;
45、绕带机构设置于滑动环的一侧;绕带机构包括活动盘、辊轴、支撑部和驱动件,活动盘与滑动环转动连接,活动盘能够以滑动环的轴线为中心周向转动;辊轴穿设并转动连接于活动盘远离滑动环一侧的侧壁,绝缘胶带卷的内壁固定设置于辊轴的外壁;绝缘胶带卷的一端与线缆外壁固定连接;支撑部用于对线缆与绝缘胶带卷之间的绝缘胶带进行支撑,以使得绝缘胶带保持绷紧状态;驱动件用于带动活动盘绕自身轴线方向转动。
46、通过采用上述技术方案,公开了绕包机器人绕带机构的具体结构;绝缘胶带卷安装在辊轴上,绝缘胶带的一端与线缆的外壁固定连接支撑部能够对绝缘胶带进行支撑,使得绝缘胶带在缠绕到线缆之前始终保持绷紧状态;驱动件用于带动活动盘绕自身轴线方向转动,从而能够牵动绝缘胶带线缆的轴线为中心周向转动,实现绕带动作。
47、第三方面,本技术提供的一种存储介质,采用如下的技术方案:
48、一种存储介质,所述存储介质存储有计算机程序;所述计算机程序被处理器执行时实现上述用于绕包机器人的胶带异常检测方法。
49、通过采用上述技术方案,提供了用于绕包机器人的胶带异常检测方法的计算机程序的载体。
50、综上所述,本技术包括以下至少有益技术效果:
51、当因绝缘胶带中途断裂或用尽等原因导致绝缘胶带脱离绕带机构时,绕带机构空载运行,绝缘胶带处于异常状态;绕包机器人根据状态分辨信息确定绝缘胶带状态存在异常时绕带机构的电流信息,处理器接收到实时电流信息后与绝缘胶带状态存在异常时绕带机构的电流信息进行比对,根据比对结果判断绝缘胶带是否处于正常装载状态,从而实现对胶带异常状态的检测;当胶带状态为异常状态时,绕带机构停止运转,以便于工作人员对绝缘胶带的更换和处理。
- 还没有人留言评论。精彩留言会获得点赞!