基于反馈线性化与预测控制的风力机变桨距控制方法
1.本发明涉及风力机控制技术领域,特别涉及一种基于反馈线性化与预测控制的风力机变桨距控制方法。
背景技术:
2.如今,能源消耗持续增加,以及因大量使用化石燃料而引起的环境问题越来越严峻,可再生能源引起了广泛的关注。风能是被用作一种清洁的可替代能源。风力发电机能够在极端风速环境下捕获一定的能量,转换为电能,可以提供部分电力需求。但是,随着风机的单机容量,以及风力涡轮机的叶片直径和质量逐渐增加,风力涡轮机的管理越来越具有挑战性。此时,控制器性能的好坏起着至关重要的作用。风力发电机组的控制运行区域可分为两个主要部分:低于和高于额定风速。在低于额定风速区域,该区域的控制目标是使风力涡轮机的转子转速达到所需的期望值,从而实现功率捕获的最大化。在高于额定风速区域,采用桨距角作为控制输入,通过设计控制算法来调节,将捕获的风力涡轮机的输出功率保持在额定值,能够平稳地接入电网系统。同时,应尽可能地减小风力涡轮机的自身负荷和疲劳载荷,能够改善风力发电机组的发电效率和关键零部件(如轮毂、轴承、塔架等)的受载情况,延长风力机组的寿命,有效地降低运维成本。因此,研究大型风力机的变速变桨距控制问题具有重要的理论和实际意义。
技术实现要素:
3.本发明提供了一种基于反馈线性化与预测控制的风力机变桨距控制方法,其目的是为了解决:在高风速情况下,通过设计变桨距控制方法,来维持风力机输出功率的稳定。
4.为了达到上述目的,本发明的实施例提供了一种基于反馈线性化与预测控制的风力机变桨距控制方法,包括:
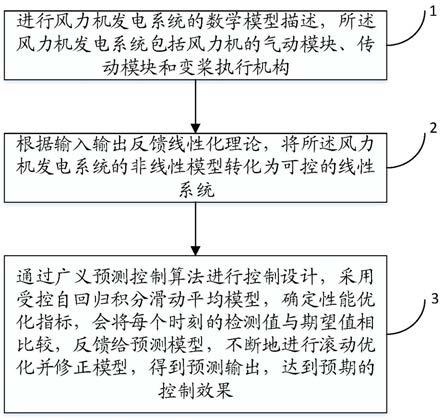
5.步骤1,进行风力机发电系统的数学模型描述,所述风力机发电系统包括风力机的气动模块、传动模块和变桨执行机构;
6.步骤2,根据输入输出反馈线性化理论,将所述风力机发电系统的非线性模型转化为可控的线性系统;
7.步骤3,通过广义预测控制算法进行控制设计,采用受控自回归积分滑动平均模型,确定性能优化指标,会将每个时刻的检测值与期望值相比较,反馈给预测模型,不断地进行滚动优化并修正模型,得到预测输出,达到预期的控制效果。
8.本发明的上述方案有如下的有益效果:
9.本发明的上述实施例所述的基于反馈线性化与预测控制的风力机变桨距控制方法。针对风力机系统非线性的特点,采用输入输出反馈线性化,将其转化成为线性系统,这样能够很好地继承风力机自身的非线性的特性,相对于在稳定工作点附近,使用泰勒级数展开的局部线性化方法来说,在线性化的处理过程中没有忽略掉风力机变桨距控制系统的任何高阶非线性项,因此更为精确,能够有效提高系统的跟踪精度;线性化后的系统上,反
馈控制设计采用广义预测控制算法来做,在复杂的外界湍流风速环境影响下,能够进行多步预测与滚动校正,将风力机系统的时滞的动态特性融入到有限时域的滚动优化目标中,能够克服模型的误差以及不确定性因素。两者方法相结合,能够可以稳定地跟踪功率的额定值,减小跟踪误差,实现良好的控制效果。
附图说明
10.图1为本发明的风力机变桨距控制方法的流程示意图;
11.图2为本发明的湍流风速轮廓图;
12.图3为本发明的风力机变桨距控制方法与pid方法的输出功率的对比图。
具体实施方式
13.为使本发明要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述。
14.如图1所示,本发明的实施例提供了一种基于反馈线性化与预测控制的风力机变桨距控制方法,包括:
15.步骤1,进行风力机发电系统的数学模型描述,所述风力机发电系统包括风力机的气动模块、传动模块和变桨执行机构;
16.步骤2,根据输入输出反馈线性化理论,将所述风力机发电系统的非线性模型转化为可控的线性系统;
17.步骤3,通过广义预测控制算法进行控制设计,采用受控自回归积分滑动平均模型,确定性能优化指标,会将每个时刻的检测值与期望值相比较,反馈给预测模型,不断地进行滚动优化并修正模型,得到预测输出,达到预期的控制效果。
18.本发明的上述实施例所述的风力机变桨距控制方法首先进行了风力机发电系统的数学模型描述,包括风力机的气动模块,以及传动链模块,以及变桨执行机构等等,通过输入输出反馈线性化理论,将风力机的非线性模型,转化为可控的线性系统,这样能够继承风力机的非线性的特点,在此基础上,反馈控制采用预测控制来做,实现模型的预测,在线滚动优化,以及反馈校正,能够有效地将输出功率维持在期望值附近,并且功率波动范围减小。
19.其中,所述步骤1具体包括:
20.风力机捕获的能量p
a
表达式由式(1)所表示
[0021][0022]
其中,ρ是一常数,为空气密度系数,r为风轮叶片的半径,v为外界变化的风速,c
p
(λ,β)为风能利用系数,与叶尖速比λ和桨距角β有关;
[0023]
叶尖速比λ的表达式如下:
[0024][0025]
其中,ω
r
指的是转子转速;
[0026]
在高于额定风速区域,风力机的风能利用系数c
p
(λ,β)可由式(3)和式(4)来拟合:
[0027][0028][0029]
其中,式中的参数分别是a1=6.909,a2=7.022,a3=
‑
0.04176,a4=
‑
0.3863,a5=
‑
14.52;
[0030]
所述风力机的传动模块采用单质量块模型,系统的动态方程如下:
[0031][0032][0033]
其中,n
g
是一常数,为齿轮箱比,t
r
为转子的转矩,t
g
表示为发电机的转矩,j
r
和j
g
分别是转子侧的转动惯量和发电机侧的转动惯量,而k
r
和k
g
分别为转子侧的阻尼系数和发电侧的阻尼系数;
[0034]
桨距角执行器采用一阶惯性环节,具体公式如式(7)所示
[0035][0036]
其中,β
r
为桨距角的参考输入,τ是一个正常数,称为时间常数。
[0037]
其中,所述步骤2具体包括:
[0038]
将式(5)和式(7)进行联立,将其转化为仿射非线性模型的标准式,可得以下方程式
[0039][0040]
其中,h(x)为转子转速与额定转子转速的偏差,其中状态变量x=[ω
r β]
t
,控制变量为u=[β
r
],以及f(x)和g(x)分别如下表示:
[0041][0042]
进行反馈线性化的检验条件,输出函数对x的一阶偏导数为:
[0043][0044]
那么输出函数的一阶导数为
[0045][0046]
计算可得l
f
h(x)=f1(x),其中f1(x)为矩阵f(x)的第一行,并且l
g
h(x)=0,因此,输出函数的一阶导数与控制率u无关;
[0047]
继续对输出函数进行二次求导可得:
[0048][0049][0050][0051]
由于l
g
l
f
h(x)≠0,因此该系统的相对阶数为2,等于系统的阶数,符合反馈线性化的条件,对输出函数y逐次求导,直至出现控制输入u,得到状态反馈控制律来消去非线性项;
[0052]
所述状态反馈如下:
[0053][0054]
反馈控制律的具体设计如下:
[0055]
将上述公式(10)和公式(11)联立,可得
[0056][0057]
设计虚拟变量v
[0058][0059]
其中,β
i
(i=0,1,2)为正数,用来配置线性化后的系统动态,上式可写成以下形式
[0060]
v=p(x)+f(x)u
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(17)
[0061]
其中,f(x)=β0‑1β2l
g
l
f
h(x);
[0062]
如果n
×
n维矩阵f(x)非奇异,由上式可得状态反馈控制律
[0063]
u=f
‑1(x)[v
‑
p(x)]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(18)
[0064]
在上述反馈控制律作用下,结合式(15)和式(16)可得
[0065][0066]
将上式(19)转换为传递函数的形式,可得
[0067][0068]
以采样周期t对其保持采样,离散传递函数如式(21)所示
[0069][0070]
其中,所述步骤3具体包括:
[0071]
1.预测模型
[0072]
广义预测控制算法gpc(generalized predictive control)采用受控自回归积分滑动平均模型,(controlled auto
‑
regressive integrated moving average),简称carima,有着更好的鲁棒性。所述受控自回归积分滑动平均模型由以下公式描述:
[0073]
a(z
‑1)y(i)=b(z
‑1)u(i
‑
1)+c(z
‑1)ξ(i)/δ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(22)
[0074]
其中,
[0075][0076]
其中,z
‑1为后移算子,δ=1
‑
z
‑1为差分算子,ξ(i)表示一类随机噪声的影响,一般假设c(z
‑1)=1;
[0077]
2.滚动优化
[0078]
采用以下目标函数作为性能优化指标,如式(24)所示:
[0079][0080]
其中,n为最大预测时域;m为控制时域,m≤n;λ(j)为控制加权系数,λ一般为常数;
[0081]
所述广义预测控制算法引入柔化系数α,使得输入首先经过柔化作用后形成参考轨迹w(i+j),而控制目标也随之改变为将输出逼近参考轨迹;
[0082]
w(i+j)=αw(i+j
‑
1)+(1
‑
α)c
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(25)
[0083]
其中,0≤c<1;
[0084]
预测控制中,需要预测超前j步的输出,采用丢番图求解,如下式所示:
[0085]
1=e
j
(z
‑1)δa(z
‑1)δ+z
‑
j
f
j
(z
‑1)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(26)
[0086]
其中,e
j
(z
‑1),f
j
(z
‑1)具体表示为:
[0087][0088]
将式(22)左右两侧乘e
j
(z
‑1)δ后,利用式(26),可以得到预测方程,以及i+j时刻的输出量,如下所示:
[0089]
y(i+j)=e
j
(z
‑1)b(z
‑1)δu(i+j
‑
1)+f
j
(z
‑1)y(i)+e
j
(z
‑1)ξ(i+j)
ꢀꢀꢀꢀꢀꢀ
(28)
[0090]
令g
j
(z
‑1)=e
j
(z
‑1)b(z
‑1),在预测未来输出时,可忽略随机干扰项的影响,则式(28)可简写为:
[0091][0092]
其中,f为开环预测向量;
[0093]
[0094]
δu=[δu(i+1),δu(i+1),
…
,δu(i+n
‑
1)]
t
[0095]
f=[f(i+1),f(i+2),
…
,f(i+n)]
t
[0096]
g
j
(z
‑1)=g0+g1z
‑1+
…
+g
j
‑1z
‑
(j
‑
1)
[0097][0098]
令w=[w(i+1),w(i+2),
…
,w(i+n)]
t
,那么性能优化指标j函数可写成
[0099]
j=(y
‑
w)
t
(y
‑
w)+λδu
t
δu
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(30)
[0100]
将忽略随机干扰项输入后的替换上式中的y,并通过对j函数求偏导,此时,可得最小控制增量δu
[0101]
δu=(g
t
g+λi)
‑1g
t
(w
‑
f)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(31)
[0102]
在实际控制系统运行时,将δu的第一个分量,分配给预测及控制对象部分
[0103]
u(i)=u(i
‑
1)+d
t
(w
‑
f)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(32)
[0104]
其中,d
t
为(g
t
g+λi)
‑1g
t
的第一行,也就是d
t
=[1 0
ꢀ…ꢀ
0](g
t
g+λi)
‑1g
t
,在系统运算过程中的性能优化函数不是一成不变的,系统以在线方式不断进行计算,对其进行优化。
[0105]
3.反馈校正
[0106]
在广义预测控制算法系统运行的过程中,会将每个时刻的检测值与期望值相比较,反馈给预测模型,不断地进行滚动优化并修正模型,最终实现预测的输出,达到好的控制效果,同时,采用了长时间的预测概念,能够将系统的动态性能很好地表现出来。对待处理复杂系统以及模型不确定性,有着良好的鲁棒性。
[0107]
本发明的上述实施例所述的方法建立的风力机数学模型以及提出的控制器,采用matlab和fast(fatigue,aerodynamics,structures,and turbulence)联合仿真,得以验证。fast风力机模拟器由nrel(美国国家可再生能源实验室)所开发。选择5mw陆基风力涡轮机模型在一定的风速范围内进行模拟及实验分析。具体的参数如表1所示:
[0108]
表1 5 mw风力机参数说明
[0109][0110]
[0111]
通过turbsim生成基于kaimal功率谱的100s湍流风速序列,用来模拟外界随机风速,该湍流风的平均风速为18m/s,湍流强度为10%,如图2所示。
[0112]
从图3可以看出,基于反馈线性化与预测控制的风力机变桨距控制方法,在外界复杂的风速环境下,相对于传统方法,能够更快速地稳定风力机的输出功率,有效地跟踪期望值,并且波动范围要小,具有良好的鲁棒性。
[0113]
以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1